基于ADAMS仿真的自主水下机器人入坞碰撞分析与导向结构优化研究
2019-06-27 09:18:42国婧倩郑荣吕厚权
兵工学报 2019年5期
国婧倩, 郑荣, 吕厚权,4
(1.中国科学院 沈阳自动化研究所 机器人学国家重点实验室, 辽宁 沈阳 110016;2.中国科学院 机器人与智能制造创新研究院, 辽宁 沈阳 110016;3.东北大学 机械工程与自动化学院, 辽宁 沈阳 110819; 4.中国科学院大学, 北京 100049)
0 引言
为实现自主水下机器人(AUV)的水下能源补充、数据传输和新任务下载,20世纪90年代初至今,国内外学者设计了各种自主水下机器人水下对接系统[1],其形式主要可以划分为5类:水面起吊回收式[2]、鱼雷管回收式、捕捉对接式[3]、包容对接式和平台对接式[4]。其中包容对接式能最大限度地减少对AUV外部的修改,对声学导航、AUV运动稳定性、航行控制和水阻力等基本不产生影响。
包容式对接装置主要包括导向罩和对接筒两部分。对接时,由于AUV自身导航精度误差及海流的影响,AUV不能保证直接进入对接筒,而是首先与导向罩发生接触,在依次接触碰撞中逐步被引导至对接筒,最终完成对接。水下对接装置也常称为水下坞站,将AUV进入导向罩的过程称为入坞,导向罩结构将直接影响AUV入坞的成败与难易,因此设计合理的导向罩外形结构十分重要。
本文针对直径为534.4 mm的回转体AUV设计了一套包容式水下对接装置,并对其有效性进行了相应的湖试验证,基于虚拟样机ADAMS仿真软件建立AUV入坞碰撞仿真模型,依据湖试数据对仿真模型进行修正。在此基础上,对凸形罩、锥形罩和凹形罩3种典型导向结构进行对比分析,完成了导向罩的优化设计。仿真结果表明,优化后的导向罩对AUV入坞时的运动趋势调整和姿态调整都有明显的改善。
1 AUV水下对接装置
AUV的水下对接是一个自动引导过程,一般采用超短基线(USBL)进行声学定位,其对接过程主要为:AUV入坞→轴向限位→锁紧→姿态校正→插拔传输→释放AUV.目前,包容对接式装置的结构形式已经有较广泛的研究,图1所示为6种典型的对接装置。其中:图1(a)是美国伍兹霍尔海洋研究所(WHOI)针对REMUS AUV[5]研发的第2代对接装置,其将加紧定位与插头连接融于一体,利用插针固定AUV,在29次试验中成功完成了17次对接[6-8];图1(b)是美国蒙特利湾海洋研究所(MBARI)针对Dorado AUV研制的对接装置[9-10],其锥形最大直径为2 m,中部部署锁紧拴和充电销,底部的摆钟通过双轴万向节与对接筒连接,可实现自调平,试验中连续4次成功对接;图1(c)是西班牙水下机器人研究中心(CIRS)与赫罗纳大学研发的Sparus Ⅱ AUV对接装置[11],其对接系统使用了声学导引和灯光导引两种算法,在15次对接尝试中成功完成了12次对接;图1(d)是印度国家海洋科学研究所研制的电磁制导对接装置[12],将水下坞站设计为电源激励的电磁线圈,电磁有限元分析精度高达96%,制导范围为72 m;图1(e)是哈尔滨工程大学研制的自治式潜器搭载对接装置[13-14],使用导向板对AUV进行限位定位,双头球铰机构辅助插拔,完成了全部2次对接;图1(f)是浙江大学研制的“海豚二号”对接装置[15-16],采用无线充电和非接触信号传输方式,通过打开与关闭电磁铁实现对AUV的锁紧与释放,在50 m深海域进行的11次回坞对接操作中成功对接10次。
此外还有美国Hydroid公司的REMUS100水面拖曳装置[17]和中国科学院沈阳自动化研究所基于灯光导引的AUV水下对接装置[18]等。综上所述不难发现,包容式水下对接装置大多采用开口逐渐向外延伸的凸形罩或简单直接的锥形罩,目前已有入口直径是4倍缩口直径的结论,而对于罩的外形结构研究只有较少公开的文献。
本文针对直径534.4 mm回转体AUV设计的对接装置,主要由艏部推行机构、限位夹紧机构、水下插拔机构、导向罩、超短基线、行程开关等组成(见图2),整体全长4.7 m,内切圆直径580 mm.其中,导向罩采用凸形罩形状,长1.44 m,开口直径2 m. 笔者团队在千岛湖AUV水下对接试验过程中,当导航定位有效、AUV航行至导向罩范围内后发现:1)AUV碰撞在导向罩入口边缘时出现弹出现象,导致入坞失败;2)AUV经历多次碰撞后,虽然入坞成功,但是运动趋势调整不良。可见除了导航精度、运动控制等多种因素外,导向罩外形结构在AUV入坞最后阶段对AUV的入坞成功率具有直接的影响。
2 AUV入坞的数理模型
ADAMS仿真软件集建模、计算和后处理于一身,并含有碰撞模型,可用以建立多体动力学模型和虚拟试验,能够直观地展现碰撞后实体的运动过程。Zhang等[16]将虚拟现实技术应用于AUV接驳碰撞过程研究,获得了较好的仿真界面。
下面对AUV入坞时虚拟样机的数理模型进行分析与计算。首先做出以下基本假设:
1) 导向罩固定于大地,AUV做均质处理;
2) 重力和浮力相互抵消;
3) 碰撞过程中忽略AUV自身的控制力;
4) 部件均无变形。
对接开始时,AUV以一定速度驶向导向罩,航行使命为定向航行速度开环,主推力恒定,在接触碰撞过程中,AUV受到重力、浮力、主推力、黏性水阻力、惯性水阻力[19]和碰撞力的作用。由于本文只分析入坞碰撞过程,故对装置进行适当简化,受力模型如图3所示。
2.1 AUV的黏性水阻力和主推力
黏性水阻力由AUV的速度和角速度引起,在碰撞过程中侧向速度和角速度很小,故只考虑AUV在前进方向的黏性水阻力。由于在入坞前AUV是匀速直线驶向导向罩,此时可以认为主推力T和黏性水阻力Fn相互平衡。
已知AUV的前进速度vx、特征长度L、湿表面积S,考虑湖水环境,可得流体运动黏性系数ε、流体密度ρ,进而根据下述公式计算Fn:
(1)
(2)
(3)
Rp=a×Rf,
(4)
Fn=b×(Rf+Rp),
(5)
式中:Re为雷诺数;Cf为摩擦阻力系数;Rf为摩擦阻力;Rp为黏压阻力;a、b为取值系数,需根据外形趋势评估,一般在0.5~2.0之间,水动力外形优秀、附体较少,则系数a、b小,本例中选取a=1、b=1.3,并已通过流体力学分析软件进行AUV水阻力仿真验证了其合理性。由于碰撞力作用,AUV的前进速度减小,其Fn也随之减小。
2.2 AUV的惯性水阻力
在碰撞过程中AUV会产生加速度和角加速度,由速度引起的黏性力成分远小于加速度引起的惯性力成分。计算加速度水动力系数即为计算AUV运动时的附加质量问题。Minorsky[20]和Petersen[21]对船体横飘运动进行了大量水动力试验,研究了船体在水中的附加质量,发现船体附加质量在碰撞过程中是不断变化的,其变化范围为Myy在0.4M~1.3M之间,Mxx在0.02M~0.07M之间,其中M为船体质量,Myy为横飘运动的附加质量,Mxx为进退运动的附加质量。
当考虑空间六自由度运动时,流体惯性力共有36项,通常认为AUV的左、右和上、下基本对称,有些系数很小、可以舍去,故6×6矩阵中只剩下14个系数:
(6)
2.3 AUV与导向罩的碰撞力
在ADAMS仿真软件中,根据Impact函数来计算两个构件之间的接触力时,其广义形式可以表示为
Fn=Kδc+Cv,
(7)
式中:Fn为法向接触力;K为Hertz接触刚度;δ为接触点的法向穿透深度;c为力的指数;C为阻尼系数;v为接触点的法向相对速度。
接触刚度由Hertz理论计算如下:
(8)
阻尼系数C使用Lankarani等[22]提出的修正迟滞阻尼系数计算,公式如下:
(9)
式中:e为弹性恢复系数;n为非线性弹簧力指数;u为碰撞速度。在确定导向罩与AUV艏部的材料后,即可根据材料特性进行相应的计算。
建立如图4所示静坐标系和动坐标系来描述AUV的运动。假设二者轴线位于同一水平面内,将Eξηζ坐标系建立在导向罩上,为方便表达轴线夹角,Eη轴垂直于纸面向外;Oxyz坐标系类似,原点位于AUV重心,此时认为Ox、Oy和Oz为水下机器人的惯性主轴;D为AUV与导向罩的接触碰撞点,1方向为导向罩上碰撞点D处的法线方向,2方向为导向罩上碰撞点D处的切线方向;α为导向罩上碰撞点D处的切线与Eξ轴间的夹角;β为Ox轴与Eξ轴间的夹角。
在AUV与导向罩发生接触碰撞过程中,碰撞点D处会产生沿法线方向的碰撞力F1和沿切线方向的碰撞力F2,在碰撞力F(F1,F2)的作用下,AUV的运动可以表达为
(10)
式中:m为AUV质量;cx为AUV纵移运动的附加质量系数;cz为AUV潜浮运动的附加质量系数;R为AUV绕重心的惯性半径;ry为绕Oy轴转动的附加惯性矩系数;(ξo,ζo)为AUV的重心坐标;(ζD,ζD)为碰撞点D的坐标。从(10)式中可以直接求出AUV上碰撞点D在1、2方向上的加速度。
3 ADAMS物理仿真模型
综合第2节的分析与计算,仿真模型中各参数初始值列表如表1所示。
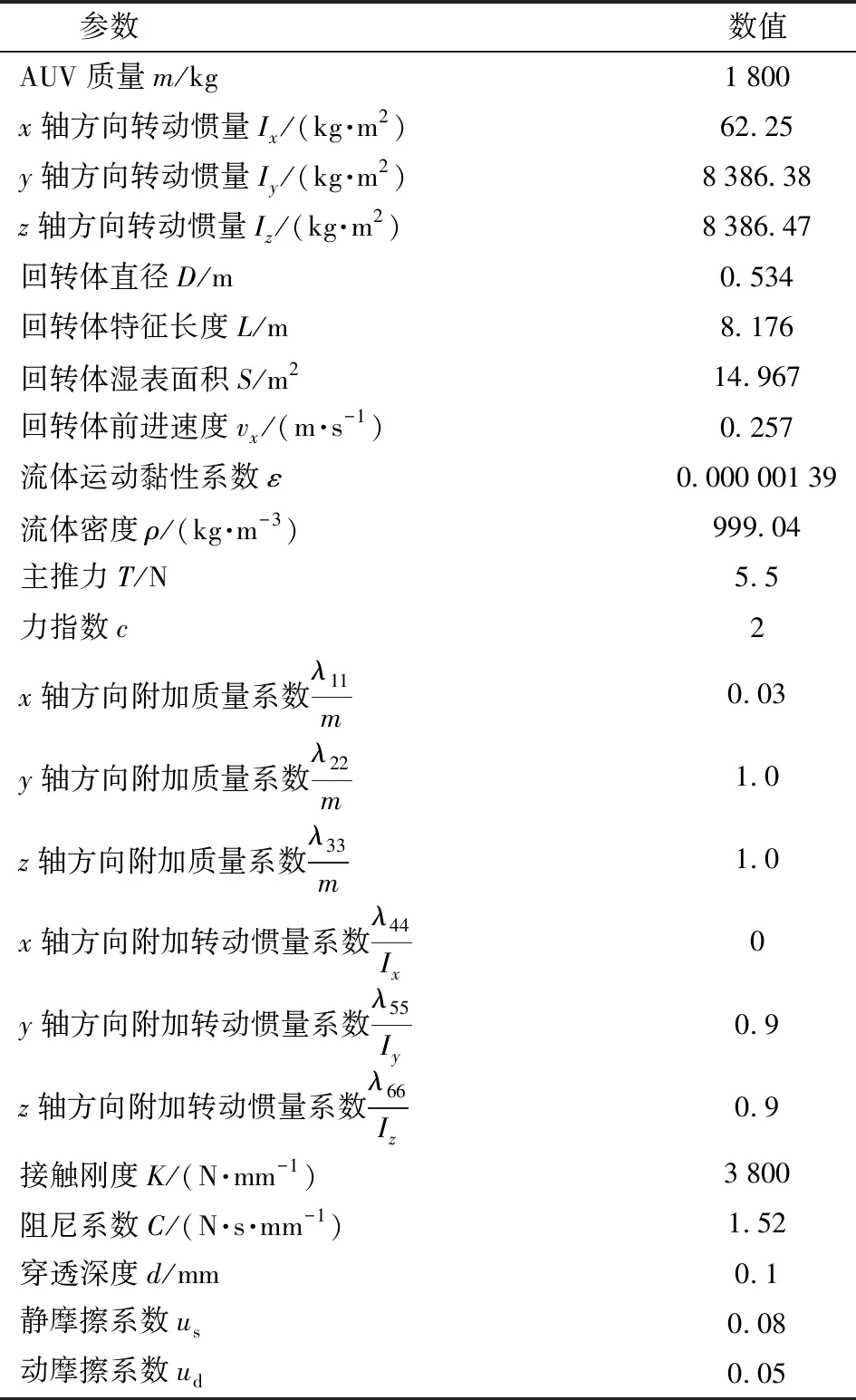
表1 ADAMS仿真模型中各参数初始值列表
在千岛湖AUV水下对接试验中,将对接装置置于试验场双体船中间,通过刚性结构由行车吊放在湖中7 m深处,并固定其位置和姿态;AUV搭载超短基线收发器入水航行,首先实现定深7 m的稳定航行;然后与安装在对接装置上的收发器进行通信,解算出对接装置的位置和姿态,自主规划回坞路径;最后AUV跟踪该路径驶向对接装置,完成对接任务。本文重点关注AUV与导向罩发生接触并逐步被导引入坞的阶段。对接装置上装有摄像机,从多段湖上对接试验录像中选取较清晰的一组对接试验,根据湖上对接试验现象选取AUV在导向罩上撞击点的大概位置,在所建立仿真模型中进行AUV入坞仿真,碰撞过程中AUV姿态的逐步变化如表2所示,可以发现,湖上试验结果和仿真结果中AUV的姿态变化趋势一致,二者对于AUV前进速度的变化
表2 碰撞过程中AUV姿态变化对比
Tab.2 Comparison of AUV attitudes during collision
曲线对比结果如图5所示。湖上试验时,由于水流的影响导致AUV速度增加至300 mm/s左右,而仿真模型中均将碰撞时AUV的速度设定为257 mm/s,故初始速度有些出入,但由图5可知AUV的速度变化趋势一致,通过比较试验结果和仿真结果中AUV前向速度的具体数据可知,该仿真模型具有可行性。
4 导向罩对比分析及改进结果
目前,工程中广泛应用的导向罩形式有凸形和锥形两种,考虑到AUV尺寸与对接装置的整体平衡,本文导向罩被限制在长1.7 m、直径2 m范围内。分析湖试数据得知,在入坞阶段,AUV纵轴线与导向罩中轴线间的夹角在4.8°~11.0°间,因此设计了如图6所示的3种导向罩。将入坞前AUV纵轴线与导向罩中轴线间的夹角定义为入坞夹角,其中,图6(a)为凸形罩,利用弧线实现锥口15°~30°再到60°的三阶圆滑过渡,起到顺延的作用;图6(b)为锥形罩,在尺寸限制下,简单地采用直线结构,开口锥角为50°;图6(c)为凹形罩,基于弹性反弹的设计理念[23],以12°入坞夹角为出发点设计得到。
4.1 仿真与对比分析
导向罩的最终目的是提高AUV入坞的成功率,在AUV纵轴线与导向罩中轴线不重合的情况下,能够尽可能引导AUV顺利回坞。导向罩的导向性能主要有3个评判指标:1)AUV成功入坞;2)入坞过程中的最大碰撞力;3)入坞过程中AUV的姿态调整耗时。其中,姿态调整耗时最重要,其值越小,AUV入坞越顺利;考虑结构的强度性能以及AUV速度下降的快慢,最大碰撞力越小越好。在上述3个评判指标下,针对AUV入坞偏距与AUV入坞夹角两种情况分别讨论凸形罩、锥形罩和凹形罩的导向性能。
4.1.1 AUV入坞偏距分析
参考湖试数据,取AUV入坞夹角为10°,并定义撞击点与导向罩中轴线的垂直距离为偏距。当AUV纵轴线与导向罩中轴线存在10°夹角时,分别对凸形罩、锥形罩和凹形罩进行不同偏距下的入坞仿真分析,得到仿真结果如图7所示。其中,图7(a)是以最大碰撞力作为评判指标时,多种偏距下各导向结构AUV入坞仿真结果;图7(b)是以姿态调整耗时作为评判指标时,多种偏距下各导向结构AUV入坞仿真结果。由图7可知,在不同偏距区间内,各导向罩调整能力不一,存在明显区别的偏距区间节点是50 cm和70 cm,为方便表达及后续的改进,将弧线在偏距50 cm和70 cm处分割为3段(见图8)。由图7可见:凸形罩、锥形罩和凹形罩能够调整的最大偏距分别为80 cm、80 cm和90 cm;偏距在10~50 cm区间,凸形罩调整效率高,锥形罩略好,但凹形罩效果很差,其产生的大力矩使AUV在框架入口处震荡,耗时长,且偏距10 cm时均入坞失败;偏距在50~70 cm区间,凸形罩和锥形罩能力相当,但锥形罩产生的碰撞力较大,AUV速度下降较快,凹形罩调整效果越来越明显;偏距在70~100 cm区间,凸形罩和锥形罩能力相当,凹形罩调整能力明显较优。因此,对于不同的入坞偏距,3种导向结构各有优劣。
4.1.2 AUV入坞夹角分析
观察湖试入坞现象发现,AUV首次撞击在导向罩上的位置大部分在第三段的环形区域内,即AUV入坞偏距大于70 cm. 如图9所示,根据实际试验情况,选取撞击点位于偏距70~80 cm处,对上述3种导向结构分别进行不同入坞夹角的仿真分析,得到仿真结果如图10所示。其中,图10(a)是以最大碰撞力作为评判指标时,不同夹角下各导向结构的AUV入坞仿真结果;图10(b)是以姿态调整耗时作为评判指标时,不同夹角下各导向结构的AUV入坞仿真结果。从图10可以看出:凸形罩、锥形罩和凹形罩能够调整的最大角度分别为23°、21°和14°;随着夹角逐渐变大,凸形罩改变AUV运动趋势的效果越来越差,调整AUV自身姿态越来越缓慢;锥形罩整体调整效率较高,但AUV到达框架入口时的速度较低甚至为负值,若要入坞,则需要再进行加速控制;当AUV入坞夹角略小于12°时,凹形罩的调整效果最佳,当AUV入坞夹角大于14°时,凹形罩不再具备调整能力,该结构具有一定的针对性;总之,就调整AUV运动趋势能力而言,凹形罩>锥形罩>凸形罩。因此,为保证AUV能够顺利入坞,需要对导向结构进行优化改进。
4.2 优化结果
根据凸形罩、锥形罩和凹形罩的对比分析结果,将母线的第三段选用凹形,第一段选用凸形,在具体尺寸限制下得到S形罩的外形结构(见图11)为长1.66 m、开口直径2.02 m. 对该S形罩进行ADAMS建模与入坞仿真,具体仿真结果见图7和图10. 由仿真结果可知,AUV撞击在S形罩入口边缘(偏距100 cm)时,并未弹出而是成功入坞;在AUV入坞姿态相同的条件下,对AUV运动趋势的调整效果明显改善。
5 导向罩性能对比试验
为验证S形罩导向性能的改善程度,在水池中进行凸形罩与S形罩的性能对比试验。试验从AUV入坞偏距和AUV入坞夹角两方面进行,以验证S形罩更有利于引导AUV顺利入坞,对提高AUV入坞的成功率有一定的改进效果。
5.1 AUV入坞偏距试验
试验中保持导向罩固定,通过AUV与导向罩之间的深度差提供入坞偏距,重点研究其入口边缘处的导向性能。由前期试验得知凸形罩的边缘导向能力较差,不具有试验价值,因此对凸形罩和S形罩分别进行偏距0.6 m和0.9 m的水池入坞试验,如图12所示。发生碰撞后AUV的深度变化如图13所示,其中:32 s为AUV首次接触S形罩和凸形罩的时刻,54 s为S形罩和凸形罩引导AUV成功入坞的时刻,表明S形罩的入口边缘不仅可以调整AUV成功入坞,而且在相同时间内S形罩调整的偏距更大,其导向能力较凸形罩有所提高。
5.2 AUV入坞夹角试验
参考仿真结果调整导向罩的位置,使导向罩中轴线与AUV纵轴线之间呈15°夹角,进行入坞试验。碰撞后AUV的航向角变化如图14所示,其中24 s为AUV首次接触S型罩和凸形罩的时刻,66 s为使用S形罩进行入坞试验时AUV成功入坞的时刻,87 s为使用凸形罩进行入坞试验时AUV成功入坞的时刻。由图14可以看出,S形罩的AUV入坞航向调整时间比凸形罩的AUV入坞航向调整时间缩短了21 s,S形罩的导向能力比凸形罩具有明显的改善,有效地调整AUV的运动姿态可以顺利入坞。
6 结论
1)基于AUV入坞时接触碰撞的受力分析及理论计算搭建的ADAMS仿真模型中,AUV姿态变化与试验过程中AUV姿态变化对应,且仿真模型中AUV的前向速度变化趋势与试验过程中AUV的前向速度变化趋势一致,仿真模型具有可行性。
2)在AUV入坞姿态相同条件下,S形罩能够调整的AUV入坞偏距最大为100 cm,比凸形罩提高20 cm;S形罩能够调整的AUV入坞偏角最大为22°,比凸形罩降低1°;但S形罩产生的碰撞力和AUV入坞时间都有所下降,调整AUV运动趋势效果明显。
3)S形罩的外环采用凹形结构,能更好地包络AUV,增加AUV入坞成功率;内环采用凸形结构能够缩小AUV在导向罩内部的运动范围,更顺利地将其收缩至框架口;S形罩的导向能力相比凸形罩具有明显的改善,可有效改善前期试验中出现的问题。
猜你喜欢
昆明医科大学学报(2021年1期)2021-02-07 01:06:48
中学生数理化·七年级数学人教版(2020年12期)2021-01-18 06:57:42
语数外学习·高中版上旬(2020年8期)2020-09-10 07:22:44
今日农业(2019年15期)2019-09-03 01:09:00
西南石油大学学报(自然科学版)(2018年4期)2018-08-02 05:42:38
三联生活周刊(2017年43期)2017-10-20 19:46:59
四川水泥(2016年4期)2016-07-25 08:08:14
广西电力(2016年5期)2016-07-10 09:16:44
中华老年口腔医学杂志(2016年5期)2016-03-01 02:24:22
中国继续医学教育(2015年5期)2016-01-07 07:38:17