基于多种模型的递进式智能SOC估算
2019-06-26 07:10李少林张景明
桂林电子科技大学学报 2019年1期
刘 民, 李少林, 张景明
(桂林电子科技大学 机电工程学院,广西 桂林 541004)
随着环境污染和不可再生能源短缺问题的加剧,发展可再生高效率清洁能源成为当今的热点,其中,电动汽车高效节能的特点深受人们的青睐。而动力电池是推动电动汽车前进的能源载体,决定整车的工作性能。电池的荷电状态(state of charge,简称SOC)定义为电池在一定放电倍率下,剩余电量与相同条件下额定容量的比值。电动汽车电池SOC估算的精度将直接影响电池的续航里程和使用寿命[1]。锂离子电池具有高能量密度、高比功率、充放电方便省时、使用时间相对较长、性能相对稳定,因此选用锂离子电池进行研究[2]。
目前,较为常用的电荷估算方法有:1)基于电池内部的电化学反应直接估算电池的SOC;2)基于外部特性参数建立等效模型的间接估算。考虑到电池内部的电化学反应比较复杂,常用间接法来检测电池的外部特性参数。间接法估算电池SOC主要有放电实验法、开路电压法、安时积分法、神经网络法、模糊逻辑法、卡尔曼滤波法、数据驱动法等[3-4]。针对锂离子电池非线性特点,采用FFRLS-EKF-SOC实现对锂离子电池进行SOC的估算。
1 等效电路模型及参数识别
1.1 2种电池等效电路模型
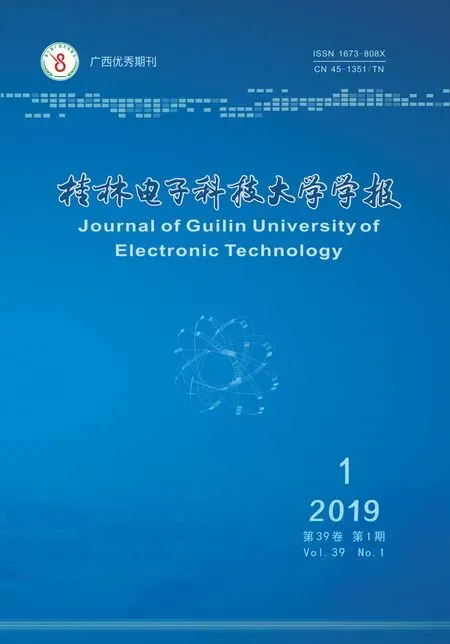
等效电路能够清晰地反映电池物理性质的特点,目前较为常用的等效电路模型有Rint型、Thevenin型、PNGV型、GNL型及二阶RC等效型[5]。本研究采用二阶RC及简化的GNL电路模型。图1为二阶RC等效电路,其中VL为电池外电路的路端电压,电压源VE为开路电压[5]。锂离子电池工作过程中的损失主要包括浓差极化环节(R1与C1并联)和电化学极化环节(R2与C2并联)以及欧姆损失RO。各个模块串联组成锂离子电池二阶RC等效模型[6]。
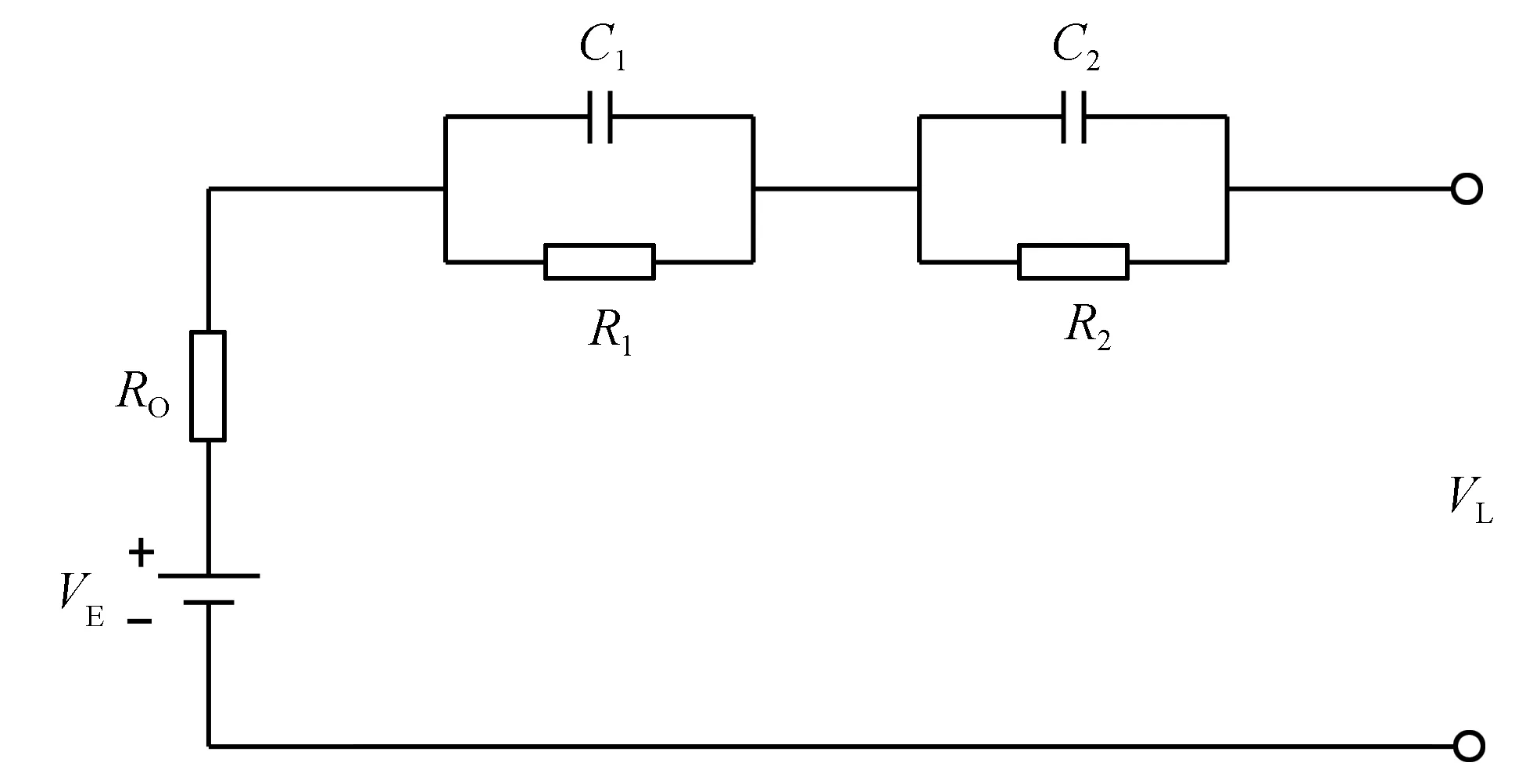
图1 二阶RC等效电路
对于图1的二阶RC等效电路,根据基尔霍夫电压定律与电流定律,可得如下方程:
VL,t=VE-V1,t-V2,t-IRO;
(1)
(2)
其中:VL,t为t时刻电池外电路端瞬时电压;V1,t为t时刻R1、C1并联瞬时电压;V2,t为t时刻R2、C2并联电路两端瞬时电压;I为t时刻电池内部瞬时电流。关于It的方程为一阶线性非齐次方程。假设电池放电时电流为正,充电时电流为负。设V1,0、V2,0为模型第1阶段、第2阶段极化初始电压,I为恒定电流,τ=RC为时间常数,t为电化学极化(浓差极化)时间,对式(1)、(2)求解可得:
(3)
(4)
(5)
GNL等效模型结构复杂,参数较多,基于GNL等效电路模型的辨识算法以及SOC估算中泰勒展开为高阶运算,计算较为复杂,不利于工程实现。为此,在GNL基础上忽略自放电因素进行简化,简化的GNL模型如图2所示[7]。
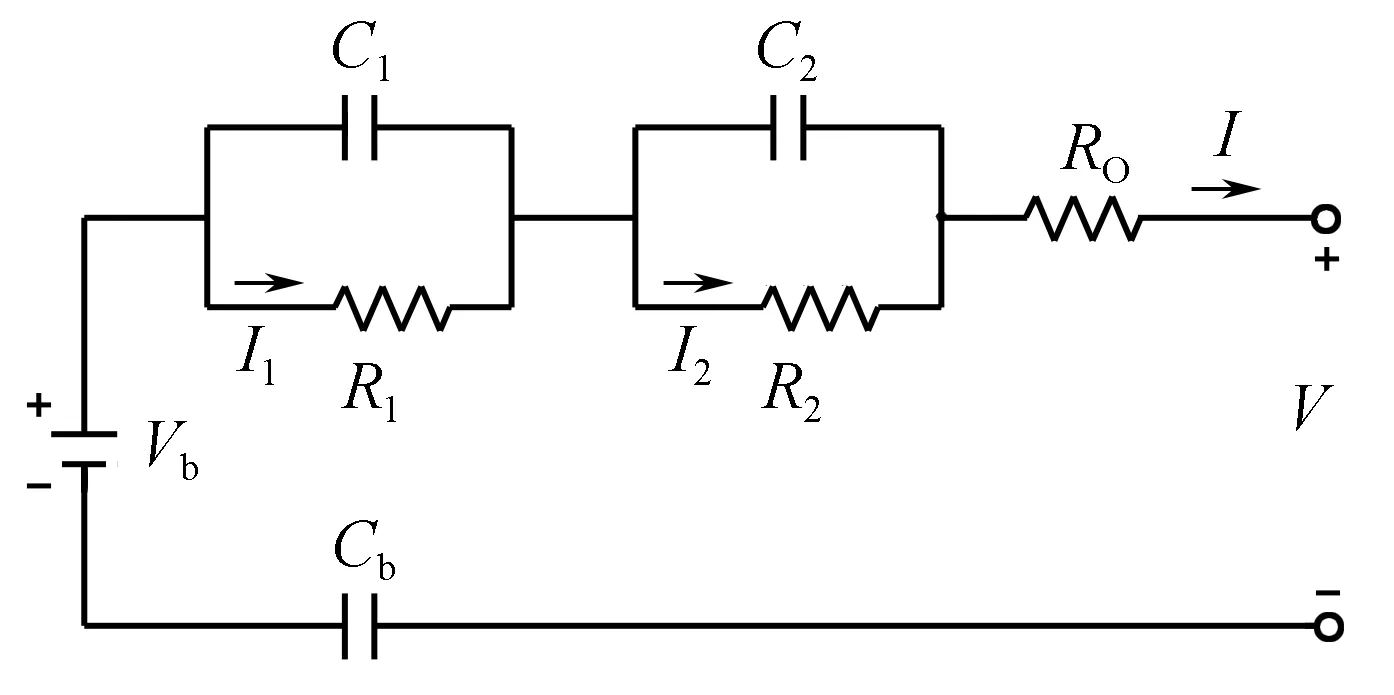
图2 简化的GNL等效电路模型
对于图2所示的简化的GNL等效电路模型,由电路关系可得到频域下的状态方程为
(6)
其中s为复数频率。
1.2 电池拟合参数
在ADVISOR平台获取锂电池典型工况下的动态过程参数。ADVISOR仿真平台中,选用gm_ev1_in车型、ESS_L17_temp型号锂离子电池进行UDDS仿真研究。根据基尔霍夫电流定律,使其流过电流ΣI=0,静置30 min,测得此时路端电压,即开路电压(OCV)VOC。以间隔10%的SOC进行启动仿真,测得10组路端电压数据。利用Matlab软件的polyfit工具对数据进行拟合,作出如图3所示的OCV-SOC拟合曲线。用ADVISOR软件进行UDDS工况下的仿真,此时OCV-SOC曲线表达式为

(7)
图3 OCV-SOC曲线图
1.3 等效电路模型参数的辨识
电池模型参数辨识主要有在线和离线2种方法。采用带遗忘因子递推最小二乘法进行在线参数辨识,解决了最小二乘法参数辨识的数据累积和饱和现象,减小了原始数据对观测精度的影响[8]。具体推导如下:
(8)
(9)

(10)

二阶RC电路模型的参数识别,根据图2电路,简化的二阶RC等效电路状态方程为
(11)
设τ1=R1C1,τ2=R2C2,c=R1+R2+RO,d=R1τ2+R2τ1+RO(τ1+τ2),对表达式进行离散化处理,利用FFRLS算法进行参数辨识处理后参数值为:
简化的GNL简化电路模型的参数识别,根据图2电路,简化GNL等效电路状态方程为
(12)
对化简结果进行离散化处理,利用FFRLS算法进行参数辨识处理后参数值为:
通过离散参数推导可看出,两模型参数辨识结果基本相同,但是简化GNL模型为三阶方程,计算量比较大,而RC等效模型计算相对简单,所以采用二阶RC电路进行参数辨识。
2 基于电路模型的算法仿真
2.1 基于电路模型的改进EKF
根据定义,SOC的瞬时值SSOC,t可通过积分求得:
(13)
其中:SSOC,0为SOC初始值;η为放电效率;Qrate为额定容量[9]。对上式进行离散化可得,
(14)
其中:SSOC,k+1为第k+1个采样点的SOC值;ik为第k个点的采样电流。
综上,对于图1的二阶RC等效电路,其状态方程为:
(15)
VL=VOC(k)-V1(k)-V2(k)-ROI(k)+v(k)。
(16)
其中:Δt为采样时间;w(k)为过程噪声;v(k)是观测噪声;VOC(k)为高阶非线性函数的泰勒展开值[10]。则EKF的状态空间向量Xk、状态转移矩阵Ak以及控制矩阵Bk为:
(17)
(18)
(19)
D=[R0+RSOC(1-fSOH)]。
(20)
其中:R0为电池出厂时的内阻;RSOC为SOC当前时刻的欧姆内阻;fSOH为电池的健康状态因子,表示电池健康程度。根据电池容量衰减定义fSOH[11-12]为
(21)
其中:C0为初始电池的容量;C为当前时刻电池的容量;CEND为电池寿命终止时的容量。EKF算法是一个多次循环的过程,其具体流程如图4所示[13]。
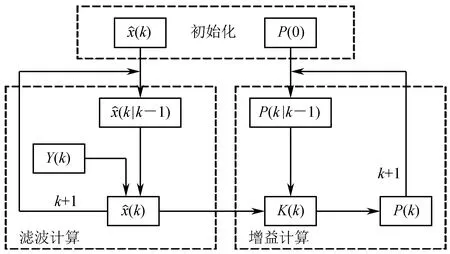
图4 EKF算法递推流程图
2.2 基于电池电路模型的FFRLS-EKF-SOC
EKF算法依赖于模型的精度,而锂电池工作在非线性模式下,导致内部参数也会发生变化,因此,需要在线更新电池内部参数,采用联合算法对动力电池SOC进行在线估算。采用遗忘因子递推最小二乘法参数辨识,将更新的参数运用到EKF算法中,估算当前时刻的SOC值。根据OCV-SOC关系曲线求出OCV,具体流程如图5所示。
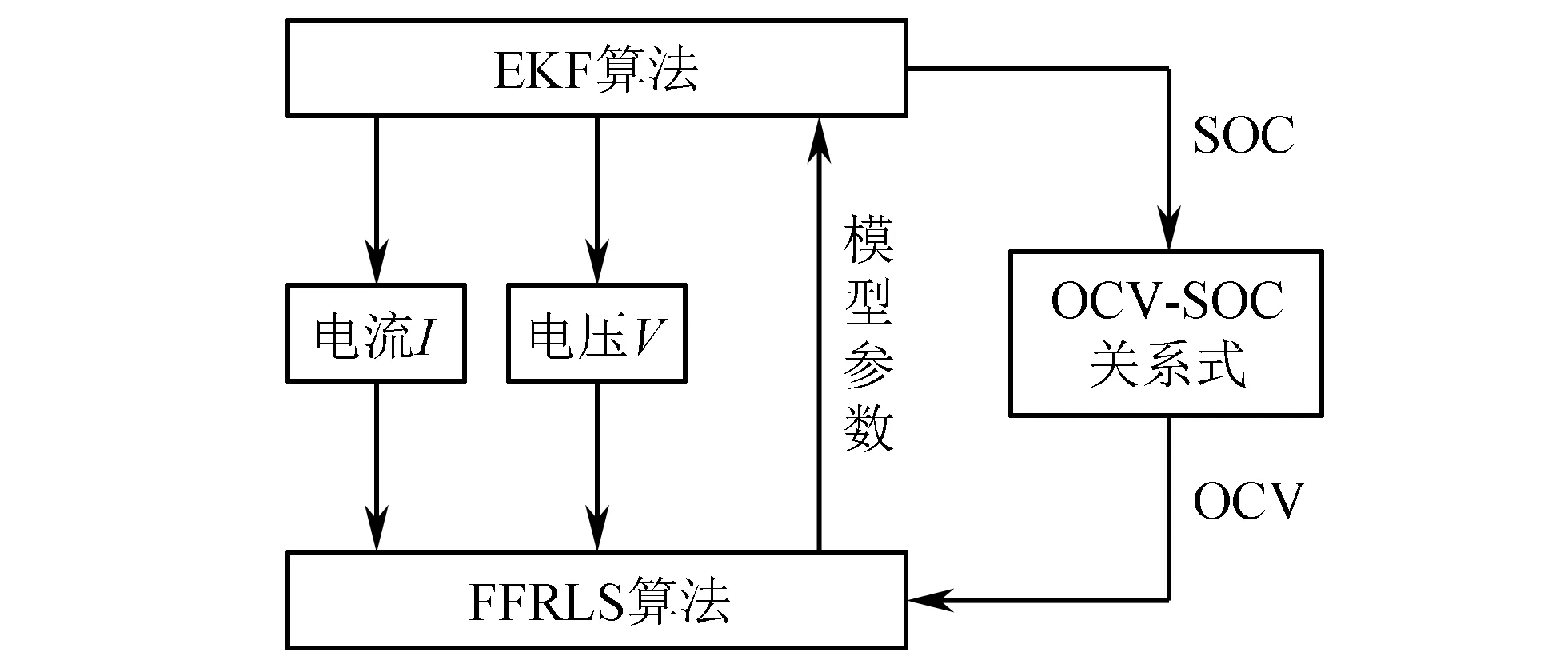
图5 基于FFRLS-EKF联合算法的SOC估算流程图
2.3 算法仿真结果及分析
在Matlab中,使用UDDS工况下的数据进行仿真,得到Ah-SOC、FFRLS-EKF-SOC与REL-SOC的SOC相对误差及SOC值对比如图6所示。从图6可看出,初始阶段安时积分法与FFRLS-EKF-SOC算法都具有较高的估算精度,但随着时间的积累,安时积分法的累计误差逐渐增大,采用FFRLS-EKF-SOC算法能减小累积误差,测得的SOC值与实际结果更为接近。采用FFRLS-EKF-SOC算法平均误差小于1.8%,最大误差小于3%。通过对比,选用FFRLS-EKF算法其整体误差较小,能够满足电动汽车动力锂电池SOC估算的需求。
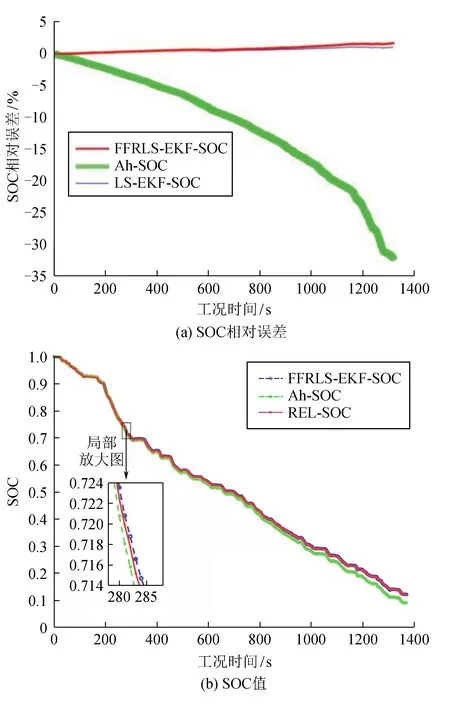
图6 UDDS工况下3种算法的SOC相对误差及估算值
3 实验验证与分析
为了验证FFRLS-EKF-SOC算法电池SOC估算的精度,通过实验进行分析对比。将数据源中电流和电压作为输入数据进行测试,利用仿真数据源中的运算结果与FFRLS-EKF-SOC算法SOC的估算结果进行对比分析,来评估FFRLS-EKF-SOC算法的估算精度。分别测试对比60组数据并进行对比分析,以其中7组为参考,对比结果如表1所示。从表1可看出,FFRLS-EKF-SOC算法SOC的估算误差均值小于3%,满足实验对SOC估算精度的要求。
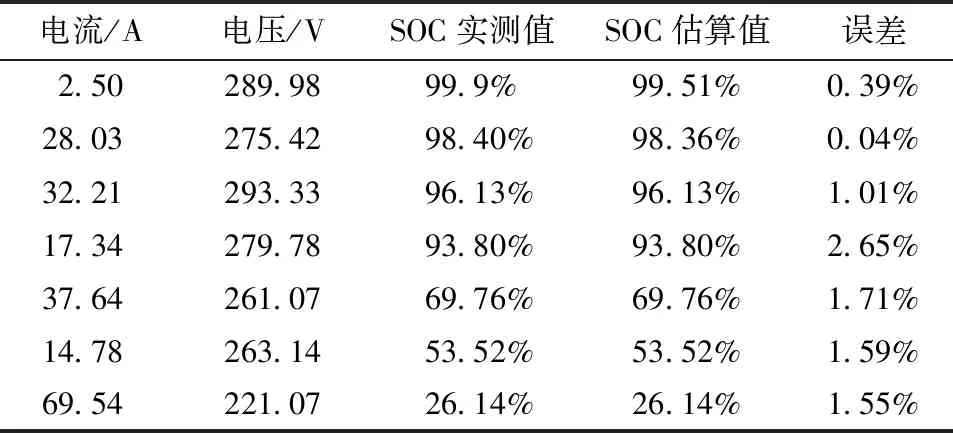
表1 系统对SOC估算测试结果
4 结束语
根据锂电池非线性的工作模式以及内部的化学损耗、电化学损耗、欧姆内阻等特点,建立了二阶RC等效电路模型和简化的GNL模型,采用最小二乘法分别对2种模型进行参数识别。选用二阶RC作为等效模型,采用FFRLS-EKF-SOC算法对锂电池SOC进行估算。在SOC估算中引入电池的健康状态因子,更加真实地反映出电池的真实状态,提高了电池SOC的估算精度。仿真实验结果表,FFRLS-EKF-SOC估算具有精度较高、对初值依赖小的特性。
猜你喜欢
电工技术学报(2022年19期)2022-10-14
汽车工程师(2021年12期)2022-01-18
汽车工程师(2021年12期)2022-01-18
科学(2020年1期)2020-08-24
应用数学(2020年2期)2020-06-24
数学物理学报(2020年1期)2020-04-21
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
汽车文摘(2017年3期)2017-12-08
汽车电器(2014年5期)2014-02-28