基于隧道磁阻效应的单轴加速度计研究*
2019-06-25 03:48王斌龙
传感器与微系统 2019年7期
王斌龙, 杨 波
(1.东南大学 仪器科学与工程学院,江苏 南京 210096;2.东南大学 微惯性仪表与先进导航技术教育部重点实验室,江苏 南京 210096)
0 引 言
隧道磁阻(tunneling magneto resistance,TMR)效应自发现以来被予以了极大的关注[1~3],其极高的磁场灵敏特性[4]决定了其在惯性仪表诸如加速度计以及陀螺仪等方面的具有广泛的应用前景。中北大学于2015年提出了基于TMR效应的三维电子罗盘[5,6]设计,利用隧道磁阻传感器检测地磁场信号从而实现方位角的校测;文献[7~10]提出并实现了基于TMR以及巨磁阻(giant magneto resistance,GMR)效应的角度传感器,通过相应的拓扑结构可以实现0°~360°的角度检测;文献[11,12]提出了基于GMR的位移检测装置,利用GMR传感器检测永磁体磁场的变化实现位移信号的检测;文献[13,14]实现了一种基于磁阻效应的双轴加速度计,通过磁阻传感器对磁场质量块的偏转测量实现加速度信号的检测。由于隧道磁阻效应相对于巨磁阻效应及磁阻效应具有极高的检测灵敏度[15],在加速度计上具有巨大应用潜力。
本文利用3D打印以及组装技术,设计了基于隧道磁阻效应的单轴加速度计。
1 原理和方法
1.1 结构设计
如图1(a) 所示,隧道磁阻加速度计主要包括TMR线性磁场传感器、弹性梁、质量块、外围框架、结构底板等。TMR线性磁场传感器位于加速度计结构的底部,用于检测由质量块底部永磁体产生的磁场。如图1(b) 所示,单个TMR线性磁场传感器由4个TMR,4个隧道磁电阻按惠斯通电桥的方式相连接并输出和磁场强度相对应的电压信号。当无加速度输入时,永磁体在中心线二侧的磁场强度分布相等,中心线两侧TMR线性磁场传感器的输出电压幅值相等;当沿着x轴有加速度输入时,永磁体在中心线两侧的磁场强度分布失衡,从而中心线两侧TMR线性磁场传感器的输出电压幅值产生偏差。因此,可以通过对中心线两侧TMR线性磁场传感器的压差检测实现加速度信号的测量。
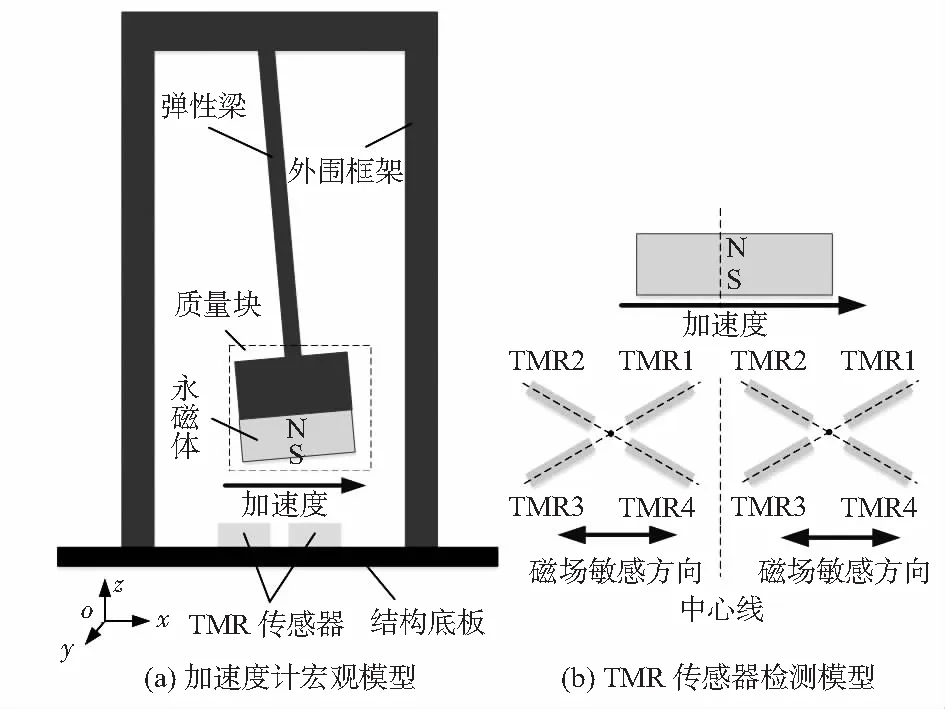
图1 加速度计结构模型
1.2 加速度计检测原理
TMR加速度计的位移—加速度关系,通过如图2所示的线加速度计力学模型[16]等效分析,当输入恒定的加速度时,位移的稳态响应为
(1)
式中m,k,wn分别为质量、弹性刚度、加速度计无阻尼自振角频率。
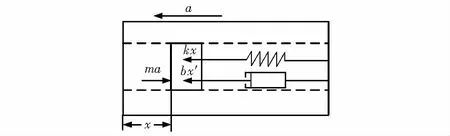
图2 线加速度计力学模型
隧道磁阻加速度计利用由铷铁硼(NdFeB—N35)材料制作的圆柱形永磁体产生磁场,其中,R=5 mm,H=2 mm,剩磁导率常数Br=1 190 mT。由于TMR传感器主要对x方向的磁场敏感, 通过如图3所示的磁场模型对x轴方向的磁场分布进行定量的分析,x方向上磁场解析表达式[17]为
(2)
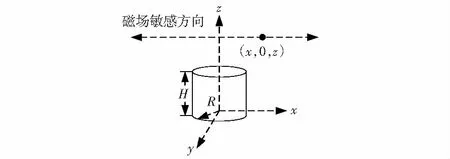
图3 磁场分析模型

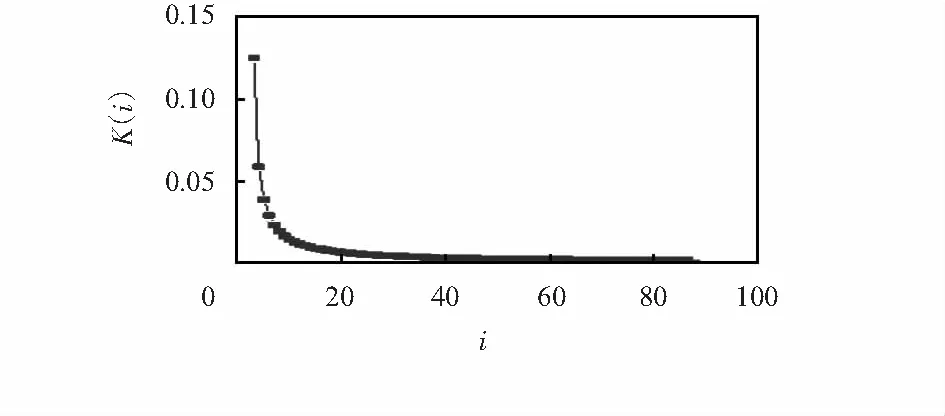
图4 K(i)曲线
由于TMR线性磁场传感器位于永磁体的外部,取z=7,8,9,10 mm分别验证x方向上磁场的分布情况。磁场的分布曲线如图5所示。其中,x0以及-x0为无加速度输出时底部两侧TMR线性磁场传感器与永磁体中心位置的水平距离,当加速度输入导致在x0以及-x0附件产生微小位移时,可用在x0以及-x0处切线的斜率kx0近似磁场的变化,因此磁场和位移的变化关系
B=kx0x+Bx0
(3)
式中kx0,Bx0分别为在点x0处切线的斜率和磁场强度。
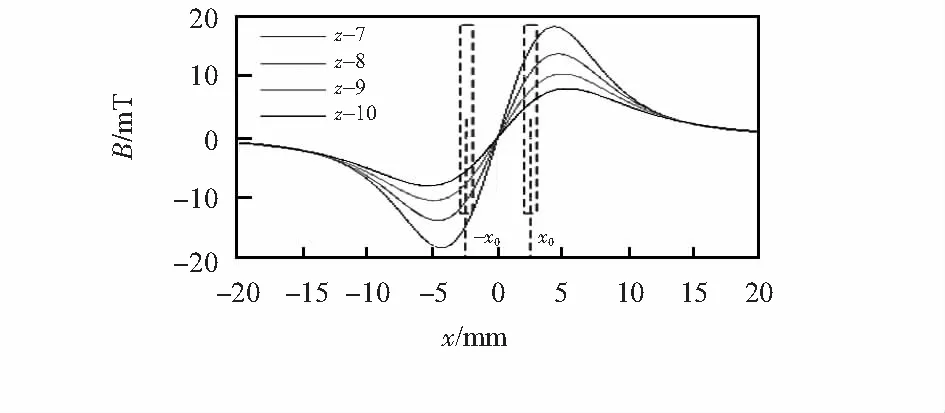
图5 磁场曲线
TMR线性磁场传感器采用线性磁场传感器TMR2104。当外加敏感方向磁场强度-8~8 mT之间时,TMR线性磁场传感器的输出电压和磁场强度成正比,灵敏度可达kB=31 mV/(V·mT)。
综上,设定TMR线性磁场传感器的供电电压为Vref,结合式(1)、式(2)、式(3),则隧道磁阻式加速度计的输出电压Vo为
(4)
2 仿真和电路设计
2.1 加速度计仿真
利用有限元分析软件ANSYS对隧道磁阻加速度计的工作机理进行仿真,图6为隧道磁阻式加速度计的前四阶模态,其中第一阶模态为隧道磁阻加速度计的工作模态。当加速度计的质量块固定时,加速度计的模态频率和位移—加速度响应灵敏度主要取决于弹性梁的长度、宽度和高度。
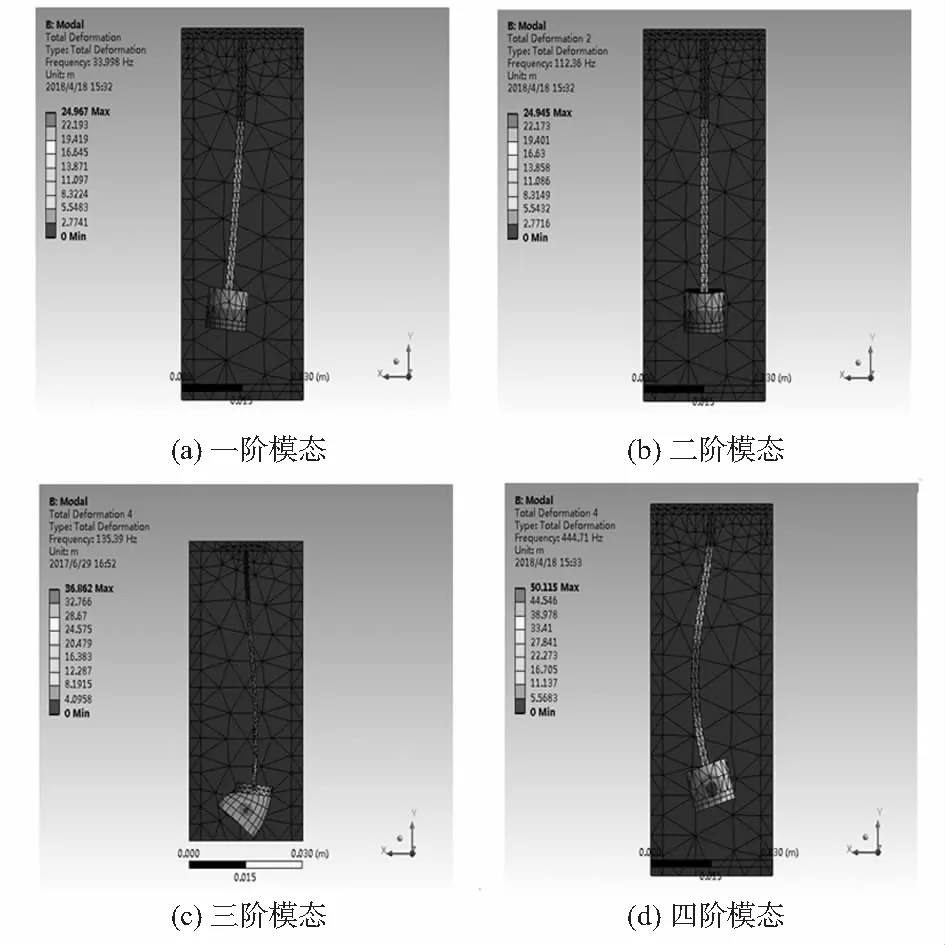
图6 加速度计仿真模态
弹性梁采用长方体结构,隧道磁阻加速度计的位移灵敏度以及工作模态的频率主要受弹性梁的长(L)、宽(W)、高(H)影响。采用控制变量法分别分析弹性梁在不同长(L)、宽(W)、高(H)参数下的加速度计最大位移以及工作模态频率,仿真结果如图7所示。仿真结果表明:弹性梁的长、宽较大、高较小时,一阶模态的工作频率较高,但位移响应较弱。
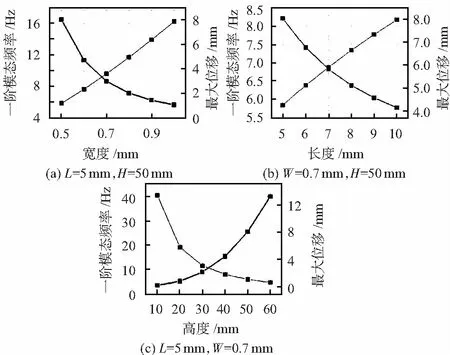
图7 弹性梁参数对性能影响曲线
综合考虑位移—加速度灵敏度以及隧道磁阻式加速度计制作过程中3D打印的精度,在L=8 mm,H=50 mm时分别取W=1.8 mm,2.8 mm作为实际模型参数,其模态频率以及加速度—位移响应曲线如表1、图8所示。
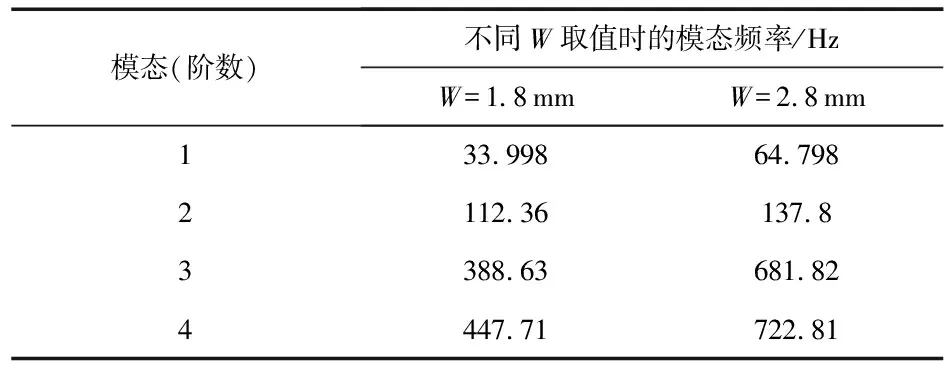
表1 加速度计参数
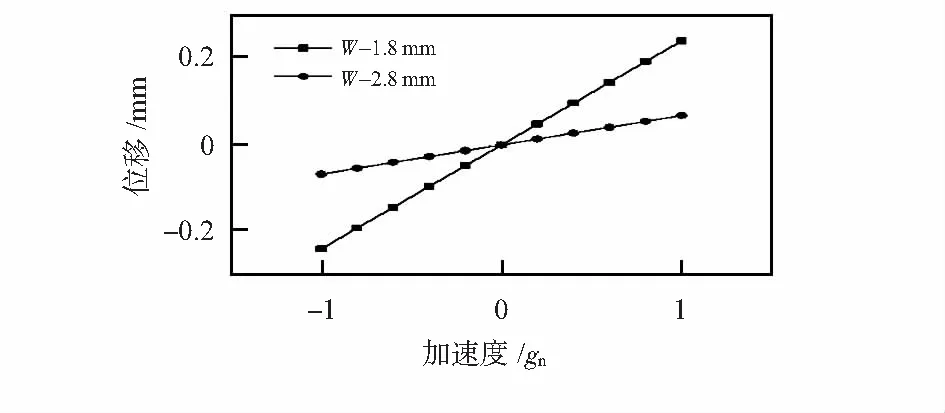
图8 加速度—位移响应曲线
2.2 测控电路设计
图9为隧道磁阻加速度计测控电路的原理框图。加速度信号的输入会导致底部TMR线性传感器的输出电压发生变化,通过二路前置仪表放大器A1,A2分别实现对底部二侧TMR线性磁场传感器输出电压的检测,A1,A2的输出信号经后级仪表A3后进入模/数转换(analog to digital conversion,ADC)模块。FPGA微控制器通过约定时序读取ADC转换后的数字信号并通过串口将采集到的数据按每秒一帧的格式发送到上位机。
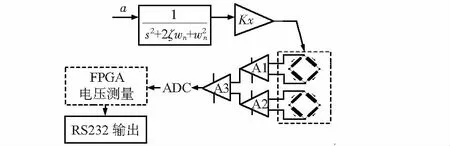
图9 TMR加速计的测量电路
3 实 验
根据上述理论与仿真,设计了基于3D打印技术的隧道磁阻式加速度计及其测控电路,如图10所示。
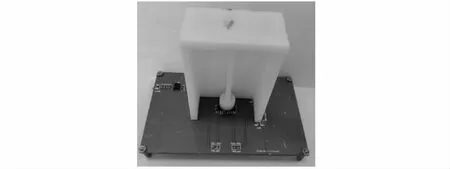
图10 隧道磁阻加速度计
图11为z=5,6,7,8 mm时隧道磁阻加速度计的加速度响应曲线。通过线性拟合以及线性度分析,得到标度和线性度参数表2所示。结果表明隧道磁阻式加速度计具有较好的线性与理论推导相一致。
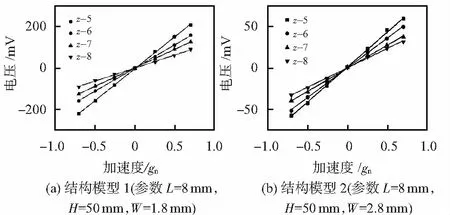
图11 加速度响应曲线
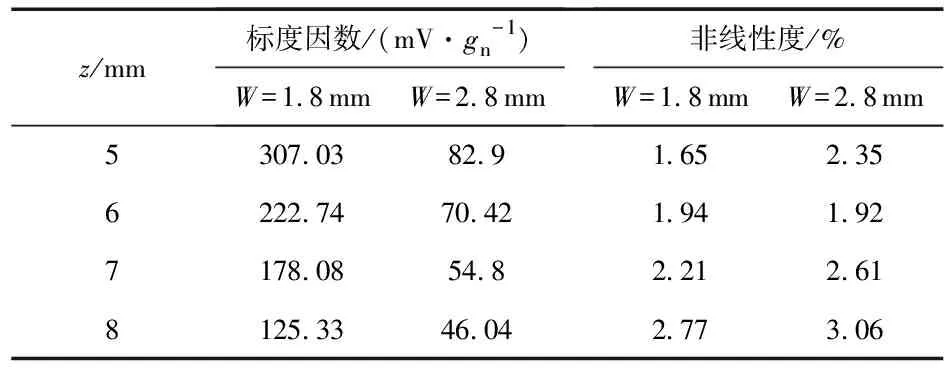
z/mm标度因数/(mV·gn-1)W=1.8mmW=2.8mm 非线性度/%W=1.8mmW=2.8mm5307.0382.91.652.356222.7470.421.941.927178.0854.82.212.618125.3346.042.773.06
隧道磁阻加速度计在z=5 mm,L=8 mm,H=50 mm,W=1.8 mm时偏置稳定性阿伦方差曲线,结果表面隧道磁阻式加速度计初步的偏置稳定性可达到206.4 μgn,如图12。
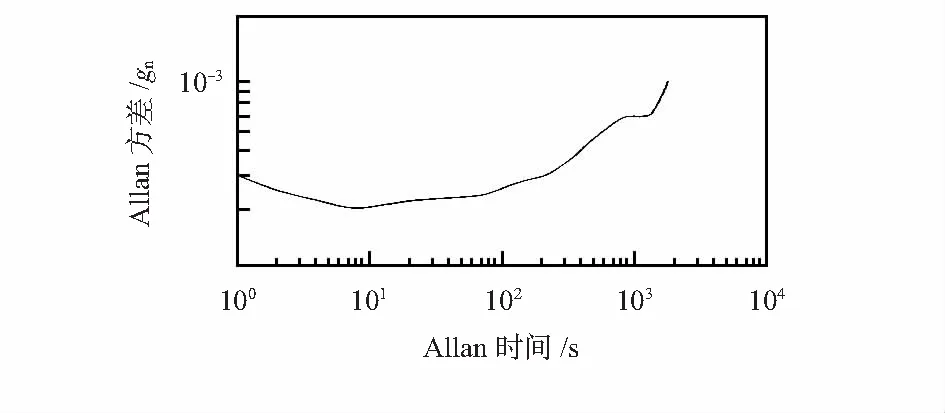
图12 阿伦方差曲线
4 结 论
对隧道磁阻式加速度计样机进行了初步实验,结果表明隧道磁阻式加速度计具有很好的线性特性,在z=5 mm,L=8 mm,H=50 mm,W=1.8 mm时的标度因数为307.03 mV/gn,偏置稳定性达到206.4 μgn,非线性度为1.65 %。
猜你喜欢
大电机技术(2022年5期)2022-11-17
大电机技术(2022年1期)2022-03-16
计算机仿真(2022年1期)2022-03-01
防爆电机(2021年4期)2021-07-28
微特电机(2020年11期)2020-12-30
仪表技术与传感器(2020年5期)2020-06-11
时代人物(2019年29期)2019-11-25
中国惯性技术学报(2019年1期)2019-05-21
电子制作(2018年19期)2018-11-14
中国惯性技术学报(2017年1期)2017-06-09