
机器视觉系统关键技术分析及应用
2019-06-18 01:06侯远韶
科技资讯 2019年8期

摘 要:一套完整的机器视觉系统由硬件和软件两部分组成,完善的硬件系统可以采集到高质量的原始数据进而大大减轻后续图像处理算法的复杂度。该文首先分析了光源的设计方法、镜头的设计以及相机的选择,在此基础上得到各个硬件设备对机器视觉系统的影响,以及硬件参数之间彼此的关联性是系统设计的关键所在。同时分析系统整体设计需要考虑的问题和原则,进而得到一套适应性强的机器视觉系统构建方案。
关键词:机器视觉 镜头 光源 相机
中图分类号:TP391 文献标识码:A 文章编号:1672-3791(2019)03(b)-0001-03
Abstract: A complete machine vision system consists of two parts: hardware and software,the complete hardware system can collect high-quality raw data and greatly reduce the complexity of subsequent image processing algorithms. The article first analyzes the design method of the light source, the design of the lens and the choice of the camera, on this basis, the influence of each hardware device on the machine vision system and the correlation between hardware parameters are the key to the system design. At the same time, it analyzes the problems and principles that need to be considered in the overall design of the system, and then obtains a set of adaptable machine vision system construction schemes.
Key Words: Machine vision; Lens; Light source; Camera
随着自动化技术的推广,机器视觉技术兴起于20世纪50年代,但真正发展得益于图像处理硬件技术的突破[1]。机器视觉技术是指用计算机来实现对客观世界的识别,进而代替人眼进行一些重复性、复杂性的工作。与传统的识别技术相比,非接触式的光学传感系统是机器视觉的主要特点,光源、镜头、摄像机以及相应的图像处理算法构成了典型的机器视觉系统[2]。硬件部分主要有图像采集部分、通信部分和输入输出端口,包括镜头、图像采集卡、编码器等;软件主要有各种图像处理算法,如中值滤波算法、数学形态学算法、深度学习算法、噪声滤除算法等[3]。选取合适的光源和镜头以及图像采集卡可以得到完善的原始图像,进而大大减少后续算法计算的复杂度,同样,合适的图像处理算法可以弥补由于前期硬件不足带来的图像模糊、信息缺失等问题,两者相辅相成,互为促进。
1 机器视觉系统的组成
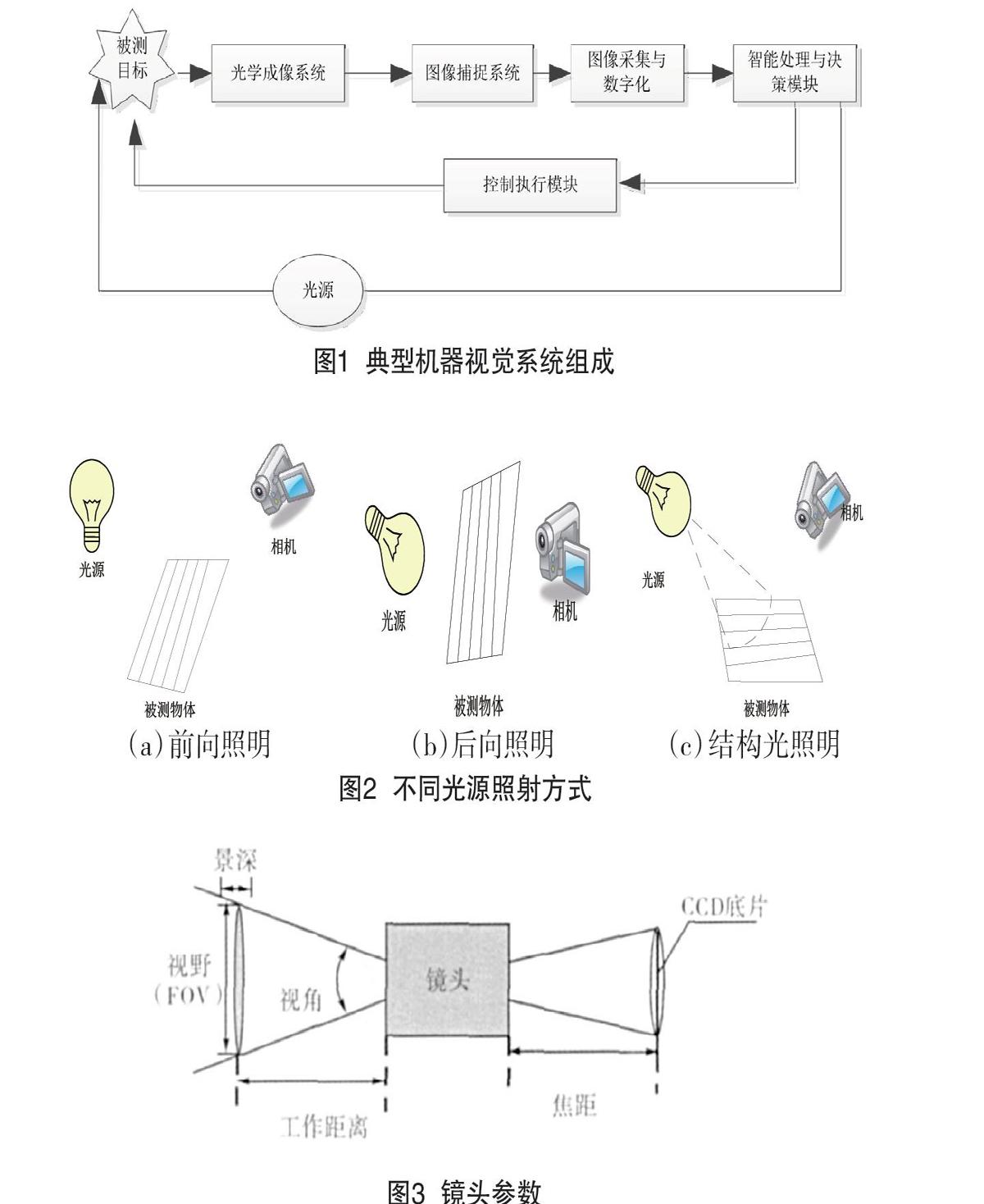
机器视觉系统没有一个统一的定义,美国机器人协会将其描述为:为了获取和处理一个完整、真实的图像,通过非接触的、光学的传感器,进而利用获取的图像信息用于控制机器进行自动化運动[4]。典型的机器视觉系统包括光源、工业用镜头、CCD或CMOS相机、光电转换器件、软件算法、输出设备、各种I/O接口、控制执行机构、被测目标以及电源等,具体如图1所示。机器视觉强调实用性和适应性,可以满足不同情况以及工业现场复杂多变的环境,因此应具有较强的可移植性和通用性;同时由于工业自动化程度的快速发展,对机器视觉的速度和精度也提出了更高的要求。
为了采集到目标图像而进行的操作步骤为:首先对被测目标进行照明突出显示目标的结构特征,继而将目标图像信息显示在光学传感器上,然后利用转换元件将光信号转化为电参量,最后通过光电转换器件将光学信号转换为计算机能够处理的电信号,通过相应的算法对数字图像进行下一步分析[5]。算法的分析依赖于原始图像的提取,为了获得通过高质量的原始图像需要对机器视觉系统进行配置,而高质量的原始图像一般具有如下特征。
(1)图像能够完整还原出原始信息无畸变、无失真。
(2)具有合适的对比度,能够突出显示目标特征和背景特征。
(3)被测目标特征应携带大部分原始信息,可以精确还原出原始图像。
(4)图像分辨率高,边缘无重叠。
2 机器视觉系统方案设计
2.1 光源的设计
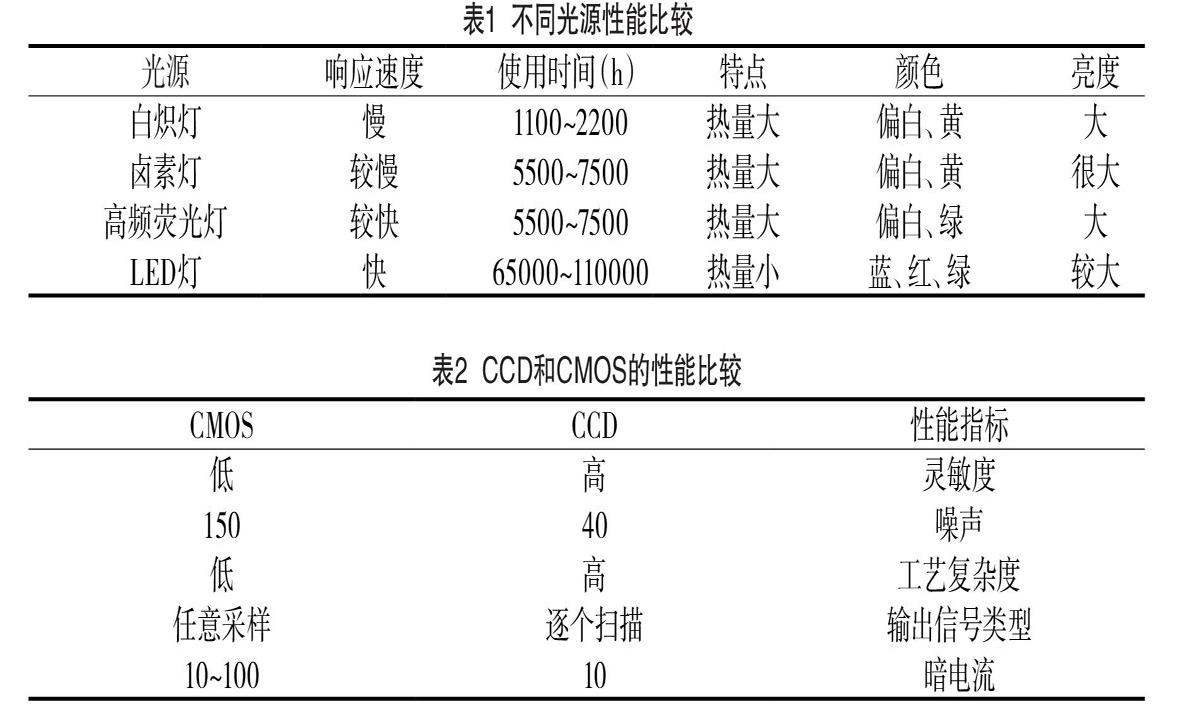
合适的光源可以突出目标的显著特征,增加对比度使目标特征和背景特征更容易区分[6]。在自动化生产中系统主要面对速度快、复杂多变的对象,因此光源的设计应充分考虑物体的运动特性尽量保持均匀、稳定,同时好的光源可以降低噪声,改善系统的分辨率,简化后续的图像处理算法[7]。光源根据人眼能否看见可以分为可见光和不可见光,根据光源的不同又可以分为白炽灯、卤素灯、高频荧光灯和LED灯,各种光源性能的比较如表1所示。
白炽灯价格低廉、光线易于传输,但反应速度慢、响应时间长;卤素灯工艺简单、使用时间长、照明度充分,但功率大、发热高;高频荧光灯使用时间长,产生的热量相对于卤素灯、白炽灯较少,但可塑性不强不能适应不同的对象、易闪烁;LED灯色温范围广、响应速度快、功耗低,在面对复杂环境以及高速运动的物体时具有良好的抗震性以及稳定性,因此应用于机器视觉的大多数场合[8]。
由于机器视觉的对象不同、突出显示的特征不一样,因此光源的位置也不一样。通过照射方法的不同,可以分为前向照明、背向照明、结构光照明和频闪光照明等[9]。前向照明,为了突出物体的表面缺陷、疵点或者其他的细节特征,大多面向低速运动物体,便于安装;后向照明,针对具有光通量物体特征的检测,可以获得高对比度的图像;结构光照明,为了得到物体与背景的区别,通过滤镜和光圈技术,进而得到被测物的三维信息[10]。不同的光源照射方式如图2所示。
2.2 镜头的设计
镜头作为机器視觉的主要部件,是连接被测物体和相机的纽带。镜头的结构复杂,根据不同的分类方式可以分为多种类型:按照有效像场分类,可以分为120型相机镜头、127型相机镜头和135型相机镜头;按照镜头接口分类,可以分为C/Y接口主要代表为minolta,EF接口主要代表为canon、F接口主要代表为nikon;按照用途可以分为,电视闭路监控(CCTV)、显微镜头、照相机镜头和工业高分辨率镜头;按照焦距分类,可以分为变焦和定焦镜头两种[11]。
镜头的主要参数有分辨率、视角、工作距离、焦距和景深等。透镜中心到焦点的距离叫焦距,焦距的长短决定了拍摄成像的大小,镜头的照度和分辨率则由相对孔径决定,它们之间的关系为:视角越大,焦距越小;工作距离越长,视野越小。选择镜头时,首先要根据具体的对象和摄像机类型进行匹配,避免“隧道效应”的产生;其次,选取合适的焦距,而焦距的选取则需要根据预留空间和实际的工作距离来确定[12]。针对不同的应用场景可以通过镜头的参数,选择合适的镜头进而采集到理想的图像,镜头参数如图3所示。
另一方面,可以根据不同的应用场景,通过相应的公式来选择镜头,假设图像高度为H1,物体高度为H2,相距为D1,物距为D2,焦距用F表示,放大倍数为M,镜头范围为E,那么它们之间的关系为:
2.3 相机的选择
相机主要通过感光元件将采集到的光学图像转换为计算机所能识别的电信号,即光电转换器件。根据传感器的感光元件不同,大致可以分为两种类型即CCD和CMOS相机。
CCD(电荷耦合器件)相机制作工艺复杂,成本高,集光电转换、电荷转移、读取信号集成于一身,通常以电荷为信号,具有成像色彩丰富、准确性高的特点。选择CCD相机时应考虑其主要参数,CCD相机的主要参数有:
(1)有效像素及分辨率、CCD靶面尺寸;
(2)扫描频率以及扫描模式;
(3)输出信号类型是模拟信号或数字信号,以及信号的输出质量(信噪比);
(4)接口类型是否标准,快门响应速度是否及时;
(5)光谱响应曲线和自动增益控制。
CMOS相机的诞生得益于超大规模集成电路的发展,CMOS图像传感器可以将图像信号处理器、模数转换电路、光敏元阵列等一系列元件集成在一个芯片上,高集成度、工艺简单、能量消耗少、价格低廉,输出图像无拖影重叠等特点,主要应用在高帧频率和高分辨率环境和需要数字信号输出的环境。CCD和CMOS的性能比较如表2所示。
因此,在选择相机的时候除了需要考虑上述因素外,还需要具体问题具体分析,考虑以下几个方面的情况。
(1)针对运动物体的形态,选择相应的扫描方式主要有线阵和面阵两种形式,面阵具有一定的局限性,一次只能拍摄一副图像;线阵扫描运动平稳、精度高,但对外界因素要求较高。
(2)为了得到高的图像分辨率,需要对相机进行像素分辨率、测量分辨率的选择,由于模拟相机噪声大、帧频慢,因此大部分情况下采用数字相机。
(3)为了扩大相机的使用范围,需要考虑输出接口形式,进而满足不同的场合需要,主要有USB接口、Cameralink接口等。
(4)为了得到分辨率高、信噪比大、灵敏度高的图像,需要考虑采集的图像颜色。图像颜色主要有彩色和黑白两种,由于机器视觉主要应用于工业检测对图像的色彩饱和度要求不高,而黑白图像具有分辨率高、信噪比大、采集速度快、对比度大、灵敏度高等特点,因此主要应用于工业实时性检测。
3 机器视觉的应用与展望
机器视觉无需与被测物体进行直接接触,可以快速获取大量信息、易于自动处理,主要应用于检查物体的空间特征、结构特征以及表面特征。在智能制造体系中主要进行图像识别、物体定位、尺寸测量以及零件检测的应用,如各类电路板组装印刷、SMT工艺设备的表面贴装。虽然机器视觉技术在工业自动化以及医学、交通等各方面都有广泛应用,但任然存在一些急需改进的问题,如:随着科技的进步和技术的发展,数据量越来越大,如何快速实时的处理数据;机器视觉面对不同的视角拍摄同一副图像,如何避免信息丢失以及减小误差。如何减小外界环境的改变对系统的影响,提高系统的鲁棒性以及精度,则是我们下一步研究的重点。
参考文献
[1] 刘曙光,刘明远.机器视觉及其应用[J].河北科技大学学报,2000,38(4):11-15.
[2] 陈晶,朱启兵.基于机器视觉的茶小绿叶蝉识别方法研究[J].激光与光电子学进展,2018(1):342-349.
[3] 唐向阳,张勇,李江有.机器视觉关键技术的现状及应用展望[J].昆明理工大学学报:自然科学版,2004, 29(2):36-39.
[4] 侯远韶.机器视觉系统中光源的选择[J].洛阳师范学院学报,2014(8):45-49.
[5] 刘焕军,王耀南,段峰.机器视觉中的图像采集技术[J].电脑与信息技术,2003(1):18-21.
[6] 陶霖密,徐光祐.机器视觉中的颜色问题及应用[J].科学通报,2001,46(3):178-190.
[7] 吴文琪,孙增圻.机器视觉中的摄像机定标方法综述[J].计算机应用研究,2004,21(2):4-6.
[8] 蔡健荣,周小军,李玉良.基于机器视觉自然场景下成熟柑橘识别[J].农业工程学报,2008,24(1):175-178.
[9] 应义斌,饶秀勤,赵匀.机器视觉技术在农产品品质自动识别中的应用研究进展[J].农业工程学报,2000,16(3):4-8.
[10] 伍济钢,宾鸿赞.机器视觉的薄片零件尺寸检测系统[J].光学精密工程,2007,15(1):124-130.
[11] 段峰,王耀南,刘焕军.基于机器视觉的智能空瓶检测机器人研究[J].仪器仪表学报,2004,25(5):624-627.
[12] 张宇,黄亚博,焦建彬.一种基于机器视觉的圆型零件检测技术[J].计算机工程,2008,34(19):185-186.
猜你喜欢
科学与财富(2021年36期)2021-05-10
上海工艺美术(2021年4期)2021-04-24
发明与创新·大科技(2017年3期)2017-03-31
东方教育(2016年14期)2017-01-16
科教导刊(2016年25期)2016-11-15
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29
企业导报(2016年10期)2016-06-04
扬子江(2016年1期)2016-05-19
戏剧之家(2016年5期)2016-04-05
