超级电容储能系统在船舶微电网中的全功率补偿技术
2019-06-18 07:00刘俊杰龙昊天邓康宁杨华峰陈小龙
浙江电力 2019年5期
刘俊杰, 龙昊天, 邓康宁, 杨华峰, 陈小龙, 孙 力
(1. 哈尔滨工业大学, 哈尔滨 150001)(2. 中广核研究院有限公司, 广东 深圳 518000)
0 引言
船舶微电网系统与其他电网系统一样, 内部也包含“源”“输”“荷”等环节, 热能通过汽轮发电机转换为电能输送到船舶微电网。 一方面, 船舶微电网系统存在阶跃型负载, 要求发电系统具有较快的功率调节速度; 另一方面, 在船舶微电网中存在大量感性负载, 因此对无功功率也有一定需求, 如果仅由汽轮发电机组承担这些无功功率,会严重影响汽轮发电机系统的带载能力。
汽轮发电机组作为船舶动力发电系统中热能到电能的转换装置, 为了适应负载突变的工况,应具有较快的输出功率调节速度。 从目前情况看, 实际的汽轮发电机组很难满足船舶微电网对动态性能的要求。 这些问题在一些文献中有所阐述: 文献[1]在ANSYS 软件中运用积分随机有限元分析方法, 针对汽轮发电机组动态性能给出了精确分析; 文献[2]对1 000 MW 汽轮机组开展研究, 主要目标是调试该核电汽轮机组控制系统,并进一步设计了汽轮机组的动态仿真模型。 根据这两篇文献, 汽轮发电机组虽然具有能量转化效率高、 安全性好的优点, 但是其动态响应速度较慢的缺点也同样明显。 当汽轮机组为阶跃型负载供电时, 其输出电压和频率将不可避免地出现严重跌落, 进而危害到船舶微电网中用电设备的正常运行, 甚至造成无法挽回的损失。 因此, 有效抑制船舶微电网中的“源”“荷”功率不平衡现象是保证微电网安全平稳运行的重要前提。 一般来说, 抑制功率不平衡的方法主要有两种: 第一种是优化汽轮机本身的控制方法, 如文献[3]在汽轮机控制回路中设置了大量受机组功率影响较大的参数自适应控制环节, 使机组在运行主参数变化较大时仍能保持较好的功率调节品质, 增强了汽轮机在恶劣环境下的可靠性, 但是这种方法对汽轮机动态性能的提升十分有限; 第二种方法是在船舶微电网中引入功率补偿装置来承担部分有功功率和无功功率, 这些补偿装置一般包括静止无功发生器[4-8]、 动态无功发生器[9-10]、 电能质量调节系统[11-15]等。 补偿装置的引入虽然可以得到较好的控制效果, 然而其缺点是使船舶微电网系统过于分散, 大幅增加了系统的复杂度。
超级电容作为新兴储能元件, 具有功率密度较高、 充放电速度快的优点, 因此将超级电容与DC-AC(直流-交流)功率变换器相结合可以得到超级电容储能系统这一全新的功率补偿装置, 具有更加优异的动态性能。 该装置对于电网中的阶跃型负载具有更好的适应性, 可以有效弥补汽轮机动态性能差的缺陷, 提升船舶微电网的可靠性。 同时, 该装置还具有无功补偿功能, 可大幅提高微电网系统的集成度。
为了提升船舶微电网的动态性能, 本文提出一种适用于超级电容储能系统的全功率补偿技术,首先建立超级电容储能系统的数学模型, 然后基于此模型对全功率补偿技术进行分析, 最后通过仿真试验对该技术的合理性和有效性进行验证。
1 超级电容储能系统
1.1 超级电容储能系统拓扑结构
在本文研究的超级电容储能系统中, 功率变换拓扑采用的是电压型三相半桥逆变电路。 储能系统结构如图1 所示, 系统组成如下:
(1)直流侧储能超级电容, 该部分作用是保证直流电压支撑以及有功功率补偿的能量, 需要事先预充电至额定工作电压。
(2)三相半桥逆变电路, 该部分作用是将来自超级电容的直流电压转换为特定的交流电压。
(3)交流侧电感, 该部分可以有效滤除输出侧开关频率次PWM(脉冲宽度调制)谐波。
1.2 超级电容储能系统数学模型

图1 超级电容储能系统结构
进一步推导图1 中超级电容储能系统数学模型。 首先定义电压型逆变器三相桥臂的开关函数sk(k=a, b, c)为:

合并超级电容储能系统中的损耗等效电阻Rs与电感寄生电阻Rl可以得到系统电阻

进一步得到三相回路方程为:

式中: UaN, UbN, UcN分别为a, b, c 三点到N 点的电压; UNO为N, O 两点间电压。
同时有
将式(4)—(6)代入式(3)可得:

由于存在下列约束条件:

因此, 由式(7)、 式(8)可得:

将式(9)代入式(7), 可得:

另一方面, 直流母线电压、 电流满足

同时直流侧电流满足

将式(12)代入式(11)中得:

式(10)和式(13)构成了静止坐标系下超级电容储能系统功率变换数学模型, 可整理为:

将以上功率变换数学模型变换到同步旋转坐标系下, 其变换矩阵为:

式中: ω 为电网角频率。
通过坐标变换将式(14)改写为:

式中: id, iq, ed, eq, sd, sq分别为旋转坐标系下d轴、 q 轴的电流、 电动势和开关函数。
式(16)就是同步旋转坐标系下的储能系统数学模型, 模型结构如图2 所示。
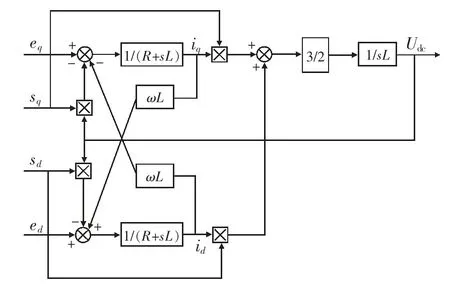
图2 同步旋转坐标系下储能系统功率变换模型结构
2 超级电容储能系统全功率补偿策略
当图1 所示的超级电容储能系统为微电网提供补偿时, 整个储能系统控制原理如图3 所示,采用基于汽轮机组输出电压的矢量控制技术对有功和无功电流各自进行独立控制。 下面从无功控制策略和动态有功补偿控制策略两方面对全功率补偿技术进行介绍。

图3 储能系统控制原理
2.1 无功控制策略
无功补偿策略能大幅优化稳定性, 提高动态和静态特性, 提升功率因数。 在超级电容储能系统中采用无功补偿策略, 可以提升整个船舶微电网的功率因数, 优化船舶微电网的电能质量, 其控制原理如图4 所示。

图4 无功补偿控制原理
负载电流iLOAD和超级电容储能系统电流iUPQC经过abc/dq 变换, 可以计算得到负载无功电流idLOAD和超级电容储能系统无功电流idUPQC。 令无功电流控制环的参考电流, 使超级电容储能系统无功电流idUPQC跟随给定id*UPQC, 即由超级电容储能系统提供负载的无功电流。
根据超级电容储能系统的补偿原理可知: 负载电流iLOAD、 超级电容储能系统电流iUPQC和汽轮机发电机组电流iDG之间的关系满足下式:

因此当idUPQC=idLOAD时, idDG=0, 即负载的无功电流全部由超级电容储能系统提供, 汽轮机组无需提供无功功率, 从而实现无功补偿。
2.2 动态有功补偿控制策略
动态有功功率控制的主要思路为: 当系统诊断到负载发生阶跃变化时, 在初始阶段由超级电容储能系统承担阶跃部分负载功率。 同时, 逐步降低储能系统输出的有功功率, 使得主汽轮机组承担的负载变化率较小, 明显降低其电压跌落。当系统到达稳态时, 超级电容储能系统将不再提供有功功率的平均分量, 这样可以有效避免超级电容持续为负载供电。 由于高通滤波器同时具有微分特性和暂态时的e 负指数特性, 这两种优异特性不仅有效保证对阶跃负载的精确检测, 而且也能实现暂态时有功功率逐步衰减输出。 因此,进一步提出经过高通滤波器计算得到补偿有功电流参考值的控制策略。
2.2.1 高通滤波器特性分析
上文提及的高通滤波器传递函数为:

式中: τ 为时间常数。
当输入为阶跃负载时, 输入信号R(s)满足:
式中: D 为阶跃幅值。
则其阶跃响应C(s)为:
式中: Nc0(s)=c(0), Nr0(s)=r(0), c(0)和r(0)分别表示系统中状态初始值以及输入初始值。
C(s)由零状态响应Cc0(s)和零输入响应Cr0(s)两个分量组成, 对应表达式分别为:
由式(21)进一步得到C(s)的时域表达式为:

设Hm=D+c(0)-r(0), 则有:

根据式(24), 滤波器的阶跃响应是关于e 的负指数形式。 Hm需要根据负载变化和系统初值进行设计, τ 是时间常数。 Hm决定有功补偿电流的最大参考值, τ 决定电流参考值的下降趋势。 当初值为0 时, 如果发生负载阶跃变化, 经过高通滤波器计算, 可得到起始量等于负载变化量、 按e 负指数函数曲线衰减的电流参考值变化曲线。
2.2.2 负载突变模态分析
当有功负载发生突变时, 系统扰动响应将会增大, 进而导致汽轮机组转速和输出电压明显跌落。 因此, 通过动态有功功率补偿在有功负载突变的初始阶段承担全部有功负载变化量, 之后逐步降低补偿输出, 使有功负载逐渐加到汽轮发电机组上。 经由动态有功功率补偿之后, 汽轮发电机组所承担的负载是逐步上升的。 经过超级电容储能系统的调节, 负载的特性得以改变, 阶跃性负载得到有效吸收, 从而有效抑制了汽轮机组转速及输出电压跌落问题。
动态有功功率控制原理如图5 所示, 负载电流iLOAD、 补偿电流iUPQC通过abc/dq 变换, 分别得到有功分量iqLOAD和iqUPQC。 将负载有功电流分量iqLOAD带入高通滤波器表达式, 计算得到高通滤波后的电流值ihp, 并进一步使有功电流环参考给定值满足, 使超级电容储能系统补偿有功电流分量跟随参考值, 进而实现对动态有功功率进行充分补偿。 另外, 滤波时间常数τ决定了电流参考量下降时间的长短, τ越大则电流参考量下降越慢, 补偿到微电网的能量越大, 抑制汽轮机组电压幅值和频率跌落的效果越好。

图5 动态有功功率补偿原理
由式(17)可知有功电流满足ΔiqLOAD=ΔiqDG+ΔiqUPQC。 因此当出现有功负载突变时有:

式中: Δiqload为负载电流变化量; ΔiqDG为发电机组输出电流变化量; ΔiqUPQC为储能系统输出电流变化量。
由式(24)有:

代入(25)可得:

当负载有功功率突变时, 即t=0 时刻, 有:

因此有:

所以, 当微电网得到储能系统的动态有功功率补偿后, 如果微电网中出现有功负载的阶跃突变, 汽轮机组提供的有功电流并不会突变, 汽轮机组不受阶跃性负载的影响。 随后, 汽轮机组的有功电流变化趋势满足:

超级电容储能系统以e 的负指数函数曲线逐步降低补偿量, 汽轮机的有功电流渐渐增大。 稳态时超级电容储能系统不再输出有功功率, 负载的有功电流完全由发电机组提供, 即:

从而储能系统自动退出动态有功功率补偿模式。
3 仿真结果
3.1 系统仿真模型
为了验证上述理论分析, 在MATLAB/Simulink 中搭建船舶微电网仿真模型, 其中汽轮发电机输出参数为1 MW, 超级电容储能系统功率变换主拓扑采用三相半桥DC-AC 电路, 其主要参数为: 交流侧电感1 mH, 直流侧超级电容额定工作电压500 V, 系统开关频率5 kHz, 采样频率5 kHz。
3.2 无功补偿仿真结果
设定船舶微电网带52.5 kW 有功负载、 52.5 kvar 感性无功负载时, 通过分析发电机组A 相电压、 电流相位, 对本文所提出的超级电容储能系统无功补偿策略的可行性和有效性进行验证。 补偿前后发电机组输出有功功率、 无功功率如图6所示, 补偿前后发电机输出电压、 电流波形如图7 所示。

图6 发电机组输出有功功率、 无功功率

图7 发电机输出电压、 电流
根据上述仿真结果, 补偿后船舶微电网的无功功率全部由超级电容储能系统提供, 汽轮机组只提供负载有功功率。
3.3 动态有功补偿仿真结果
为了对动态有功功率控制的有效性进行验证, 设定船舶为电网在初始条件下带52.5 kW 有功负载, 在t=10 s 时突加67.5 kW 有功负载。 补偿前后电网电压、 频率如图8 所示, 补偿前后发电机组、 储能系统输出功率曲线如图9 所示。

图9 汽轮发电机组和超级电容输出功率
由图8、 图9 可知, 在超级电容储能系统的补偿作用下, 电网电压幅值和频率的暂态跌落得到了有效抑制, 突加的有功功率全部由超级电容储能系统承担, 对汽轮发电机组来说, 负载是连续变化的。 超级电容输出的有功功率逐渐降低到0, 而发电机组输出的有功功率缓慢增加, 最终全部负载都加在汽轮发电机组上。
4 结语
本文提出一种基于超级电容储能系统的船舶微电网全功率补偿方法, 该方法由动态有功功率和无功功率控制策略组成, 可以有效降低船舶微电网的暂态电压与频率波动。 建立了船舶微电网和控制策略的数学模型, 并针对1 MW 汽轮机供电的船舶微电网进行了仿真研究。 仿真结果表明: 引入超级电容储能系统后, 当微电网中带52.5 kvar 无功负载时, 电网电压与电流仍然保持同相位, 此时无功功率完全由超级电容储能系统提供, 汽轮机组为负载提供有功功率; 当船舶微电网突加67.5 kW 的有功负载时, 电网频率跌落小于3%。 这说明本文提出的全功率补偿技术可以有效抑制电网中的“源”“荷”功率不平衡现象,提升船舶微电网的安全性和可靠性。
猜你喜欢
内蒙古电力技术(2022年1期)2022-03-18
能源工程(2021年6期)2022-01-06
化工自动化及仪表(2021年6期)2021-11-26
能源工程(2021年3期)2021-08-05
防爆电机(2021年3期)2021-07-21
沈阳工业大学学报(2020年3期)2020-06-03
电子技术与软件工程(2020年17期)2020-02-02
电子制作(2019年22期)2020-01-14
电子制作(2018年19期)2018-11-14
电子制作(2018年19期)2018-11-14