
基于Arduino UNO无线语音识别智能机器人的设计与实现
2019-06-15 01:01杨钰林权伟赵涛
数字技术与应用 2019年3期
杨钰林 权伟 赵涛
摘要:本设计采用Arduino UNO控制器作为检测和控制核心,配合凌阳SPCE061A单片机的语音识别技术结合现代语音合成技术,通过RB无线蓝牙模块实现信息传输,语音控制机器人进行可变速前进、后退、左转、右转、测距播报等功能。可搭载多种传感器,适应复杂环境勘探作业的需要。
关键词:Arduino UNO;SPCE061A;语音识别;蓝牙
中图分类号:TP271 文献标识码:A 文章编号:1007-9416(2019)03-0171-01
1 设计背景
基于物联网、云计算、大数据的当今社会,对人工智能、AI技术的全方面普及,智能制造技术占领了时代发展的潮流尖端,机器人的智能化已成为当代机器人设计的主要目标,它所涉及的学科包括机电一体化技术、机器视觉技术、无线通信技术、智能控制技术、仿真技术、网络技术等等。机器人的技术水平可以反映出一个国家的科学技术水平,特别是测控技术的发展水平。如何使机器人具有语言、感觉、运动功能,在某些领域取代人工劳动,是智能机器人研究的主要目的之一。
随着现代科学和计算机技术的发展,人们在与机器的信息交流中,需要一种更加方便、自然的方式。语言是人类最重要、最有效和最方便的信息交流方式,人类通过语言相互沟通,据统计,在日常生活中人类的信息交流约有75%是通过语言来完成的。这就很容易让人想到能否用自然语言代替传统的人机交互方式,如键盘、鼠标、手写或按键输入等。人机语言交流需要机器具有听觉,能“听懂”人类的语言,这就是机器的语音识别功能。
2 系统整体设计
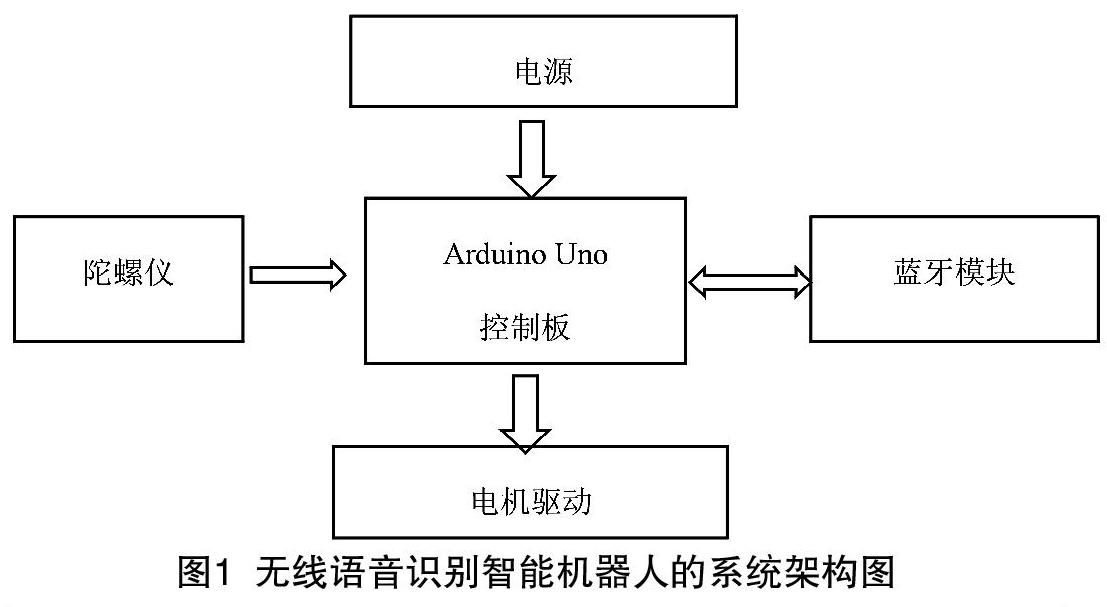
无线语音识别智能机器人采用Arduino UNO控制器作为检测和控制核心,配合凌阳SPCE061A单片机的语音特色,利用系统的语音资源,通过RB无线蓝牙模块实现语音控制机器人前进、后退、左转、右转、测距播报等功能。通过搭载传感器,可以实现循迹、避障、超声测距播报等功能。无线语音识别智能机器人预留多种传感器接口:如光线传感器、烟雾传感器、温度传感器等,为机器人在后续功能上的升级扩展提供了极大的便利性。无线语音识别智能机器人的系统架构如图1所示。
3 系统硬件设计
无线语音识别智能机器人的硬件结构主要分为機器人端和操作端两部分:
机器人端的核心控制板是Arduino UNO,通过从各种传感器中收集具体的环境参数,经过PID算法处理,输出相应的控制信号到电动机驱动电路,对操作端的指令做出相应的反馈动作。机器人端主要包括:
3.1 超声波传感器
通过超声波传感器的感应,在停止状态下可以播报与障碍物之间的距离,有效探测范围约为1cm-500cm。通过信号发生器产生超声波,按定向式65度圆锥侦测,遇到障碍物后,反射回接收器端口,响应信号,距离测算公式为:
测试距离=高电平持续时间/340(m/s)*0.5
3.2 预留传感器接口
预留的接口包括光线传感器、声音传感器、烟雾传感器、温度传感器等多种传感器接口,为机器人在后续功能上的升级扩展提供了极大的便利。
3.3 无线蓝牙模块
通过设计蓝牙模块一主一从,进行使用GFSK调制方式配对,实现与操作端之间的通信和无线数据传输,在空旷地带,收发距离可以达到20-30m,在短距离的局域网通信中,发挥不可替代的优势。
3.4 Arduino UNO控制器
无线语音识别智能机器人的检测和控制核心,Arduino既能脱离电脑独立运行,也能在运行时和电脑中运行的程序进行通讯对话。在应用领域上,还能通过搭载各种传感器来感知环境,通过控制灯光、马达、WIFI传输、无线摄像头和其他的装置来反馈、影响环境。除此之外,它能够兼容传感器扩展板v5.0并且能用它额外的端口适应新的扩展板。可以采用 USB 接口供电,不需外接电源,也可以使用外部 DC 输入,使用更为方便。
3.5 直流电机驱动器
用于驱动直流减速电机或双极性步进电机,能够同时驱动4个直流电机工作,通过定义PWM调速接口,设定模拟值,使直流电机运转,实现前进、加速前进、后退、左转、右转、停止的功能,使机器轻松应对不同的工作环境。
3.6 舵机
作为无线语音识别智能机器人的电机,其内部采用的电机为直流有刷空心杯电机,内部采用无铁转子,具有能量转换效率高、激活制动响应速度快、运行稳定性可靠、自适应能力强、电磁干扰少的优点。
操作端包括凌阳SPCE061A单片机套装和无线蓝牙模块,通过凌阳SPCE061A单片机完成操作者语音输入识别并转化为可识别的机器语言,传输给无线语音识别智能机器人。
4 系统软件设计
无线语音识别智能机器人预设了5条命令和语言参考模型库,通过开机启动,按提示输入语言指令,让机器熟悉语言环境,通过特征提取,学习训练、模式匹配来匹配语言模型库,进一步改变成为机器语言,配置端口的电平高低,驱动电机工作。在接收到操作人员发出的语音指令时,语音识别系统给予回应,通过预先设定好的程序配置单片机引脚的高低电平,进而控制机器人的行为动作。
5 结语
无线语音识别智能机器人是通过语音来控制机器人的工作状态,实现软件和硬件之间的相互协调,人机交互是本设计的要点。
通过扩展各种传感器,无线语音识别智能机器人可以实现自动判断工作环境及状态,并且自动调整工作方式,并且将工作环境中的不同状况通过语音方式传送给操作者,与操作者之间进行沟通,真正的实现像人一样通过协作和思考来进行工作。
Design and Realization of Intelligent Robot for Wireless Speech Recognition based on Arduino UNO
YANG Yu-lin,QUAN Wei,ZHAO Tao
(Jiangsu Vocational College of Information Technology, Wuxi Jiangsu 214153)
Abstract:This design uses Arduino UNO controller as the detection and control core, with SUNPLUS SPCE061A MCU speech recognition technology combined with modern speech synthesis technology, through RB wireless bluetooth module to achieve information transmission, voice control robot for variable speed forward, backward, left, right turn, ranging broadcast and other functions. It can be equipped with a variety of sensors to meet the needs of exploration in complex environments.
Key words:Arduino UNO;SPCE061A;Speech recognition;Bluetooth
猜你喜欢
工业设计(2022年7期)2022-08-12
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
玩具世界(2017年8期)2017-02-06
中国新通信(2016年21期)2017-01-06
