
快递柜存件六自由度机械臂设计
2019-06-15 01:01王桂香何全燕李为端张浩宗润峰王晨
数字技术与应用 2019年3期
关键词:机械臂
王桂香 何全燕 李为端 张浩 宗润峰 王晨

摘要:为实现快递的智能分拣装柜,设计了一款可在小型快递收发站应用的快递柜自动存件的六自由度机械臂。该机械臂通过扫描装置识别快递上的条形码,按照快件的质量、体积等因素进行分类,再进行存件工作。该机械臂采用球坐标形式,使用全液压驱动方式,模仿人的手臂和手腕运动,通过手部结构、腕部结构、臂部结构的设计,各部分缸体的设计计算,实现预定的功能。
关键词:快递柜;机械臂;六自由度;液压驱动
中图分类号:TP241 文献标识码:A 文章编号:1007-9416(2019)03-0006-02
0 引言
随着越来越多的人选择网上购物,快件数量日益增加,在各大高校及社区虽然快递柜的应用缓解了取快递的压力,但是仍需要通过人工来实现快递的分拣装柜,通过对快递分拣人员的采访了解到快递的分拣和装柜需要大量人力和时间,这导致快递在派件后较长时间才能获得快递到达的信息,导致消费者收到快件的时间严重滞后。通过市场调研,机械臂虽然应用广泛,但还未在小型快递收发站应用。为实现快递的智能分拣存件,设计一款可在小型快递收发站应用的快递柜自动存件的机械臂,它克服传统快递员手动存件快递中耗时、耗力等问题,可实现智能存储、快速分拣、准确投放等功能,此技术可在全国推广。
1 机械臂的总体设计
1.1 设计方案
该机械臂应具有智能分类、快速存件的功能。为实现智能分类,需在机械手上安装摄像头扫描装置,通过扫描快递上的二维码(包含快递的体积、质量等信息)对快递进行分类,然后机械臂快速抓取地面上的目标快递将其存入指定的空闲快递柜。同时,机械臂应具有记忆存储功能,可以迅速判断空闲快递柜的位置。
为实现上述过程,该机械臂采用全液压驱动方式,并采用球坐标形式,模仿人的手臂和手腕运动,采用六个自由度:Z方向的升降运动;绕Z方向的回转运动;手臂的仰俯运动,上仰为30°,下俯30°;X方向的伸缩运动;手腕的仰俯运动;绕X方向的回转运动。手臂的仰俯运动能抓取地面上的物体,手腕上下摆动可以使手部适应被抓快递的方位并保持目标姿势。该坐标式的机械臂具有灵活性高、体积小、工作范围大等优点[1]。
1.2 运动分析
机械臂机构可以简化为由许多关节连接起来的连杆机构。把构件的坐标系(如图1所示)应用于机械臂的每一个连杆中,便于准确的描述一个连杆与下一个连杆之间的关系。
齐次的变换是描述这些坐标系之间的相对位置与方向的一种通用方法,把齐次变换记为A矩阵。A矩阵用来描述第k个连杆相对于第k-1连杆的位置,对于本设计的六自由度机械臂,则第六个连杆相对于基座的位姿可用以下式表示:Tn=A1A2A3A4A5A6。
1.3 机械臂的组成
机械臂主要由控制系统、驱动系统、执行机构等构成。通过控制系统,利用液压驱动,按动作顺序,在规定的时间和速度下完成机械臂结构的运动,且传感器采集机械臂关键位置的速度和位移,超出最大误差时发出信号并及时采取应急动作,这样可在顺利完成抓取动作情况下保证精度。
2 机械臂的执行机构设计
机械臂的设计自由度为6个,旨在使其运动灵活,当某方向的运动不宜过大时,为满足运动要求可通过与其相关的自由度来补充,这更有利于机械臂的稳定。执行机构包括手部、腕部、臂部等机构。其中手部是直接与目标物接触的部分;本机械臂采用滑槽式手部结构,驱动杆向下推动手指夹紧,向上拉时则手指张开。手腕是联接手部和手臂的部件,用来调整目标物的方位;臂部是支撑手部、腕部的主要部件,手臂設有3个自由度(绕横轴旋转、上下摆动和左右摆动),采用关节式坐标。该坐标下的结构易优化,有利于提高机械臂的动态操作性能[2]。
3 机械臂的驱动系统设计
本机械臂采用全液压驱动,采用3个回转缸,2个伸缩缸和1个俯仰伸缩缸。其中3个回转油缸实现了2个腕部回转和一个大臂回转;2个伸缩缸分别实现大臂和小臂的伸缩运动。
3.1 驱动方案
方案设计如下:机械臂动作从原位开始,顺序依次为大臂下降→手指夹紧→ 大臂上升→底座回转→手腕回转→小臂伸出→手指松开→小臂缩回;待快递顺利放置到快递柜中后,小臂伸出→手指夹紧→小臂缩回→底座回转→底座满退→手腕回转→小臂下降→手指松开→大臂上升至原位停止→准备下次快递装柜。
3.2 油缸选择
为实现腕部的回转与仰俯运动,采用装有轴线互相垂直的回转油缸的双腕部结构;采用单叶片回转油缸驱动手腕摆动运动。为实现沿X轴伸缩的自由度要求,小臂的驱动机构设计成双作用油缸。手臂俯仰运动,采用活塞缸与连杆机构联用来实现的。手臂俯仰运动用的活塞缸位于手臂的正下方,其活塞杆和手臂用铰链连接。机械臂的大臂是支撑手臂的部件,主要实现臂部的升降、回转、仰俯等运动,采用回转缸置于升降缸之上导向杆布置在活塞缸内部的机身结构。大臂伸缩油缸对于机械臂起传动件、导向杆和定位件的作用,布置要合理,以减少对升降支撑轴线的偏心矩,防止卡死现象。
4 仿真分析
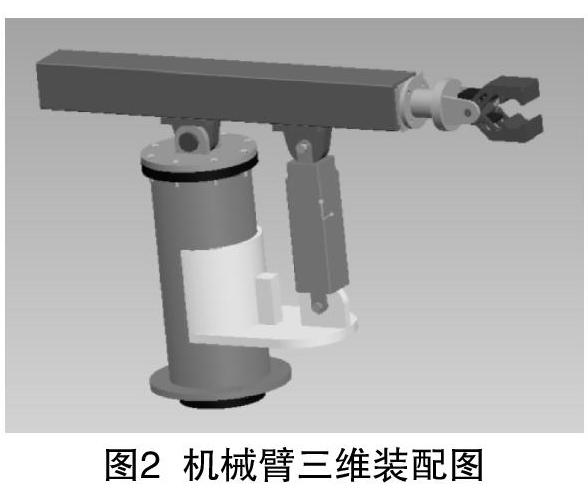
采用Pro-E软件进行了底座、大臂、小臂、手腕、手指等部件的三维建模,最终完成了机械臂的三维建模图及运动路线分析,结果显示了该机械臂机构的运动动态性能,同时检验了机械臂的装配与其运动过程中的干扰,有利于发现设计中的问题并进行调整。三维建模图如图2所示。
5 结语
本文对应用于快递柜的六自由度机械臂进行一定的理论研究,包括机械臂运动方程建立、油缸计算,建立机械手零件模型库,通过仿真完成六自由度机械臂的设计。仿真结果显示其结构刚度高,位姿调整灵巧,可实现现实工况下的搬运任务。同时,为六自由度工业机械臂后续研究提供了基本数据,对物流行业发展也起到促进作用。
参考文献
[1] 李海龍.六轴工业机械臂的结构设计与轨迹规划[D].安徽理工大学,2018.
[2] 郎霞俊.全液压岩心钻机提下钻机械手的设计[J].机械管理开发,2018,33(10):9-10.
Design of a 6-DOF Manipulator for Express Cabinet
WANG Gui-xiang,HE Quan-yan,LI Wei-duan,ZHANG Hao,ZONG Run-feng,WANG Chen
(Hebei University, Baoding Hebei 071002)
Abstract:In order to realize intelligent sorting and storing of express delivery, a 6-DOF manipulator for automatic storage of express cabinet which can be used in small express delivery stations is designed. The manipulator recognizes bar codes on express delivery through the scanning device, and classifies and store them according to mass, volume and other factors of express delivery. The manipulator uses the spherical coordinate and full hydraulic drive to imitate the movement of human's arm and wrist. By structure design of hand, wrist and arm, the design and calculation of the 6-DOF manipulator can realize the predetermined function.
Key words:express cabinet; mechanical arm; six degrees of freedom; hydraulic drive
猜你喜欢
科技与创新(2016年23期)2017-03-30
山东工业技术(2017年4期)2017-03-28
求知导刊(2017年1期)2017-03-24
计算机教育(2016年7期)2016-11-10
现代电子技术(2015年17期)2015-09-23
