永磁磁通控制型混合励磁开关磁阻优化设计*
2019-06-15 07:47刘勇智鄯成龙林博闻
火力与指挥控制 2019年1期
刘勇智,鄯成龙,林博闻,王 程,戴 聪
(空军工程大学航空工程学院,西安 710038)
0 引言
在航空领域,开关磁阻电机(Switched Reluctance Motor,SRM)以其结构简单、运行可靠、能够在高温高速下工作、容错性高和控制方式灵活等优势,已经成为航空起动发电系统中电机重要选择之一[1-3]。但是由于SRM的功率密度较低,绕组电流除了含有转矩分量外,还含有励磁分量,这将使得绕组的伏安容量增加,引入额外的附件损耗。此外,该电机在电感正半周增加时产生电磁转矩,在电感负半周减少时产生制动转矩,造成了电机的材料利用率低[4-5]。针对SRM的缺点,随着高性能稀土永磁材料在电机上的应用越来越普及,学者们通过将传统SRM和稀土永磁材料相结合,提出了许多新型磁阻电机方案。
文献[6]提出了双凸极永磁电机,在传统SRM的基础上,在定子轭部嵌入了永磁体。可以看出,永磁体的引入使得绕组磁通回路的磁阻变大,该电机的齿对齿和齿对槽的绕组电感变小,从而可以实现电机快速换流,但是其结构工艺性差,不适合驱动航空领域大功率的电机系统。
文献[7]提出了磁通反向电机。该电机将两块永磁体放在定子的凸极极靴表面,这两块永磁体充磁方向相反,转子结构和传统的SRM一致,当转子旋转时定子绕组的磁链也会产生变化,这种电机和上面的电机相比,磁链变化更加明显,电感更小,功率密度更高。但是由于永磁体放在定子凸极极靴表面使得其气隙过长,从而影响电机性能。
通过分析,新型磁阻电机的永磁体一般放在定子的齿顶和定子轭部上,都存在一定的缺点。因此,本文设计了一台永磁磁通控制型混合励磁开关磁阻电机,通过在定子极间放置了永磁体实现了电绕组和永磁体的混合励磁,电机采用三相12/10结构,经过分析得出与传统的SRM相比转矩特性有所提高,永磁体的嵌入有效地提高了SRM的转矩特性。
1 工作原理
1.1 结构
永磁磁通控制型混合励磁开关磁阻电机与传统的SRM相同点在于转子上无绕组和永磁体,定子上有集中绕组,定转子极数不同并且定转子的铁芯均由硅钢片叠压而成,控制方式基本相同。不同点在于该电机定子极间装有高性能的稀土永磁材料,采用单极性驱动,使得其电磁性能发生较大变化,电机结构如图1所示。
该电机遵循“磁阻最小原理”,可以通过改变通电电流从而改变电磁转矩,实现对电机的控制。
该电机的通电方式为固定的单方向通电,控制方式和SRM基本相同,永磁体放在定子极间,定子相邻两极构成一相[8],当永磁体方向确定后绕组电流方向严格固定。定子上存在着永磁体励磁磁势和电励磁磁势,要确保两种磁势方向一致,从而使得两个励磁支路进行并联。如图2所示,当定子绕组通电时,由永磁体和励磁绕组产生的磁力线并联通过转子磁路,当绕组断电后,永磁体产生的磁力线不再通过转子而是在定子内实现闭合。由于是通过控制绕组电流控制电励磁磁势,从而实现对永磁体磁势的控制,所以称该电机为永磁磁通控制型混合励磁开关磁阻电机。

图1 结构示意图
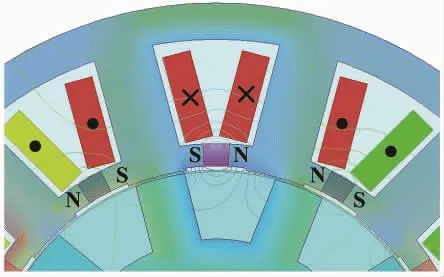
图2 A相导通时局部放大图
虽然只是在定子极间嵌入永磁体,但是该电机内电磁环境已发生了很大变化,构成了由两个励磁源相互作用耦合并且磁路高度饱和的复杂电磁系统。
1.2 转矩原理
下面对其转矩原理进行分析。假设忽略磁路饱和与铁芯损耗,各相绕组参数和结构均相同,该电机可视为一个机电装置,实现着将输入的总电能转化为机械能和磁场储能的功能。
1.2.1 电路方程
该电机的电压方程为:

式中,U代表相电压列向量,R代表绕组电阻矩阵,i代表相电流列向量代表磁链列向量。

式中,处于对角线的元素为绕组的自感,其余的为绕组间的互感。
1.2.2 机械方程

式中,F为电机的摩擦系数,TL为负载转矩,J为转动惯量,ωr为电机转速。
1.2.3 机电联系方程
电机的电功率为

由于R很小可以忽略,式(3)~式(5)联立得

式中,Wf为电机磁场储能,Te为输出转矩。

由式(7)可得,输出转矩则由3部分组成

T1称为自感磁阻转矩,是由绕组自感随着转子旋转而产生的转矩,与电流的方向无关,转矩的方向始终指向磁阻最小的方向。T2称为互感磁阻转矩,是由绕组之间的互感随着转子旋转而产生的转矩,通过式(11)可以看出,转矩的方向与励磁磁通和绕组电流的方向相关。T3称为永磁励磁转矩,是由永磁体产生的磁链随着转子旋转而产生的转矩,在传统的SRM电机中,T3=0。在本电机中,其表现为引力,与T1的方向相同。
传统SRM的输出转矩仅仅为T1,从理论上可得本文设计的电机输出转矩为T1+T3,相对于传统的SRM,电机的转矩将增加。
2 电机设计
本文的设计目标为:额定转速1 500 r/m,额定电压270 V,额定功率1.1 kW。由于永磁体的嵌入,使得该电机与传统SRM在电机设计上存在一定地区别。
2.1 电磁负荷
电机的电负荷是指沿着电枢表面单位周长的安培导体数,磁负荷是指气隙表面单位面积的平均磁通量,电磁负荷的选择对电机的效率、运行和温升具有很大影响[9]。电负荷定义式为

式中,I为绕组电流的有效值,Nph为每相绕组匝数,Da为转子外径。经验上讲,电负荷取值为15 000 A/m~50 000 A/m。
磁负荷定义式为

式中,lδ为电枢的计算长度,其值与定转子的位置相关,一般取105 la,la是电机铁芯的长度,是转子极距,φ为在关断角位置下的每极磁通。经验上讲,磁负荷取值为0.3 T~0.6 T。
2.2 定转子极弧 βs、βr
定转子极弧的选取要使得电机留有适当的绕组空间,从而使电机的电感小,输出转矩大,起动性能好[10]。因此
根据SRM的特点,定转子极弧有一取值范围

2.3 永磁体尺寸
由于永磁体和定子铁芯的轴向长度一致,这里的尺寸只考虑永磁体的宽度bm和厚度hm,永磁体的厚度是指沿着磁化方向的永磁体长度。
当绕组不通电时,若此时定子磁路闭合,那么永磁体磁通由原来仅通过定子磁路闭合变成了部分通过气隙和转子磁路闭合,这会产生定位转矩。为了避免产生定位转矩,必须保证绕组不通电时定子磁路不饱和,因此
式中,Br是永磁体的剩磁磁密,Bst是定子铁芯的饱和磁密,bp是定子齿宽,由式(18)得

永磁体的厚度要保证在绕组最大励磁磁势下永磁体不退磁,同时受到定子槽口尺寸的限制,即

式中,N是每极绕组匝数,Imax是定子绕组最大电流,Hc是永磁体矫顽力。由式(20)得

通过电机设计,电机的结构参数如表1所示,需要说明的是本文设计的电机中永磁体的宽度是弧形,所以该宽度用弧度表示。

表1 结构参数
3 仿真分析
为了验证设计的正确性,采用Ansys Maxwell软件对模型进行仿真分析,其中永磁体材料采用的是N36Z_20,设定剩磁为1.03 T,矫顽力为920 kA/m,建立的有限元模型如图1所示,剖分结果如图3所示。
3.1 瞬态场分析
电机瞬态特性波形如图4所示。

图3 有限元剖分图

图4 瞬态特性波形
由图4可知,在励磁阶段,电压为正向电压,幅值在270 V左右,磁链线性增加。在续流阶段,电压为反向电压,并在反向电压的作用下,磁链线性下降至0 Wb附近,电流迅速下降至0 A,合成转矩具有波动性。结果验证了有限元模型的正确性。
3.2 稳态场分析
电机特殊位置的磁力线分布的仿真结果如图5所示。
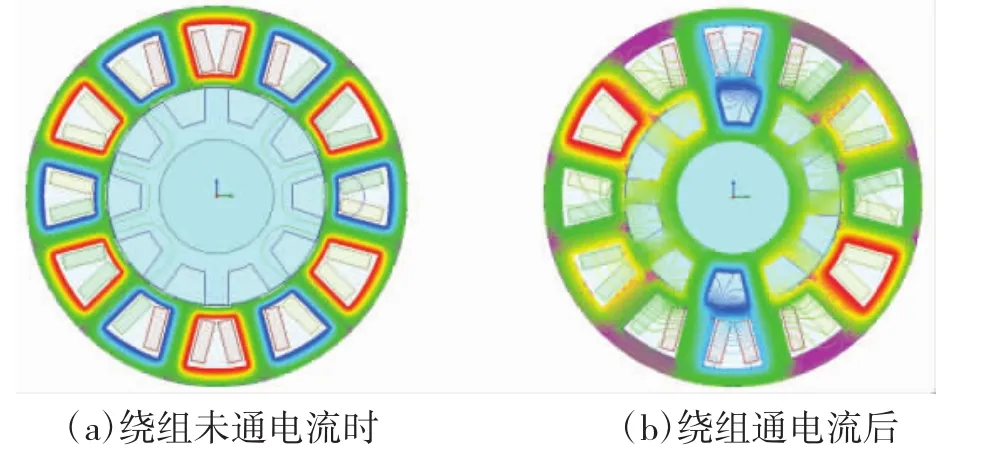
图5 磁力线分布图
在转子位置角θ为0°时,A相未加励磁电流,永磁体产生的磁力线沿着永磁体N极-定子极-定子轭-定子极-永磁体S极闭合,几乎没有从定子-气隙-转子路径闭合。在θ为18°时,A相已经导通,绕组产生的电磁势控制永磁磁势,使永磁磁通改变流通路径,合成磁通从定子-气隙-转子-定子路径闭合。仿真试验很好地验证了本电机原理的正确性。
通过稳态分析,设转子位置角在(0°,36°)范围内变化,电流源电流在(0,50 A)范围内变化,计算电机的电感特性 L(θ,i)、磁链特性(θ,i)和转矩特性T(θ,i),仿真结果如图6~图8所示。
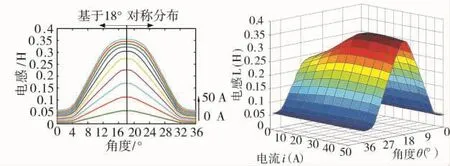
图6 电感特性曲线
由图6可知,电感关于θ=18°对称,电感随着电流增加而增加,呈现非线性变化趋势。

图7 磁链特性曲线
由图7可知,磁链关于θ=18°对称,当转子位置角θ为0°时,定转子磁路磁阻最大,磁通最小,磁路不饱和,随着θ不断增大,SRM越容易达到饱和。随着电流的增大,磁阻变小,磁通变大,磁路达到饱和状态。

图8 转矩特性曲线
由图8可知,电流在电感的上升区(0°,18°),电磁转矩为正向转矩,电机处在电动状态;电流i在电感的下降区(18°,36°),电磁转矩为负向转矩,电机处于发电状态。电磁转矩随着电流的增大而增大,呈现非线性变化趋势。
混合励磁开关磁阻电机的非线性模型主要控制参数是电流和位置角,通过调整这些参数可以控制电机的转矩等性能参数,将磁链特性曲线进行反演插值,得到电流关于磁链和θ的关系(i,θ)。
3.3 与传统电机比较
为了验证本文设计电机在转矩特性上的改进,分别仿真两种电机的转矩曲线,结果如图10所示。
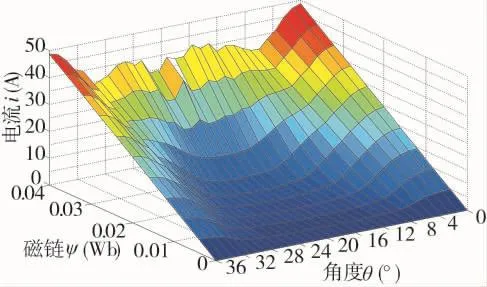
图9 电流关于转子位置角和磁链的特性曲线
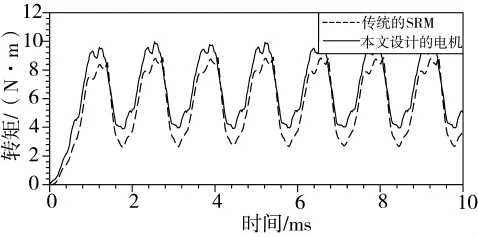
图10 两种电机的转矩对比
由图10可知,由于永磁体的加入使得电机的平均转矩增大,仿真结果很好地验证了该电机设计的有效性和正确性。
4 优化设计
本文采用遗传算法对该电机的结构参数进行多目标寻优。遗传算法具有全局寻优效果好、鲁棒性强和收敛速度快等优点[11-12],适合应用于电机设计之中,从而提高电机性能,具体是使用Ansys Maxwell Optimization模块中的遗传算法实现优化过程。
在电机设计中,SRM的定子极弧系数、定子轭高、转子极弧系数对电机的转矩性能影响较大,同时考虑永磁体的宽度和厚度对性能的影响,选取以上5个结构参数为设计变量。永磁体宽度是指沿着切向方向的永磁体长度,厚度是沿着径向方向的永磁体长度。各设计变量的约束条件如表2所示。

表2 约束条件
优化目标是使得电机平均转矩Tav最大化,并且转矩脉动Trip最小化。依据加权求和法,将多目标优化问题转换为单目标优化,即求解目标函数最小值。目标函数为

根据实际应用条件设ω1为0.6,ω2为0.4。采用遗传算法进行迭代寻优,种群大小为30,迭代次数最大为100次,复制种群选择比例法,变异选择高斯分布,概率为0.02,杂交选择两点杂交,概率为0.5。算法流程如图11所示。
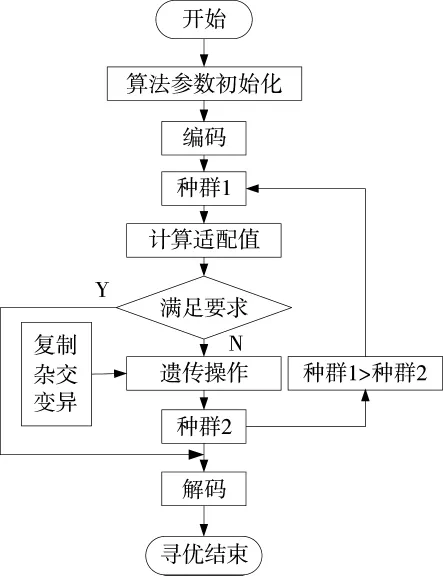
图11 遗传算法流程图
优化结果如表3、图12所示。

表3 优化前后对比
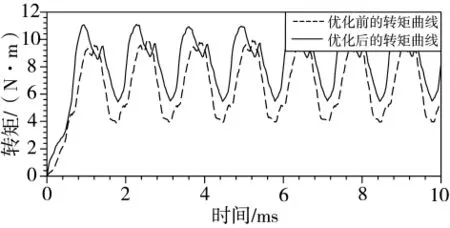
图12 优化前后对比图
由图12和表3可知,优化后电机的平均转矩增加了23.78%,转矩脉动减小了22.82%,经过多目标优化后该电机平均转矩明显增加,转矩脉动明显降低,实现了遗传算法多目标寻优的目的。
5 结论
本文设计了一台永磁磁通控制型混合励磁开关磁阻电机。首先对其结构和工作原理进行分析,使用电机设计的方法进行电机结构设计,然后使用Ansys Maxwell软件进行建模和有限元仿真,验证了模型的正确性,建立了精准的非线性模型,为下一步的系统仿真建模打下了良好的基础,同时与传统的SRM进行对比,验证了该电机的转矩特性有明显的提高。最后以平均转矩最大化和转矩脉动最小化为目标,采用遗传算法对电机主要结构参数进行了多目标优化,仿真结果表明优化后电机的平均转矩增加了23.78%,转矩脉动减小了22.82%,实现了优化的目标。后续将对该电机在航空领域的具体应用进行深入研究。
猜你喜欢
安徽理工大学学报(自然科学版)(2022年2期)2022-09-08
大电机技术(2022年3期)2022-08-06
冶金设备(2022年1期)2022-06-10
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
计算机仿真(2022年1期)2022-03-01
防爆电机(2022年1期)2022-02-16
科技视界(2020年19期)2020-07-30