
一种卫星对接装置空间凸轮机构传动分析验证
2019-06-14 09:26侯文伟高碧祥黄剑斌
火力与指挥控制 2019年4期
侯文伟,杨 臻,高碧祥,黄剑斌
(1.中北大学机电工程学院,太原 030051;2.中国空间技术研究院,北京 100094)
0 引言
空间技术的飞速发展促使空间在轨服务技术成为一个新的、独立的研究方向,基于OSV(on-orbit/orbital service vehicle,OSV)技术的自主式在轨服务已成为发展低成本、高可靠空间维护和服务技术的必然选项,也是各国航天领域的研究重点[1-3]。而空间对接装置作为保证两个航天器之间刚性连接的机电装置,是对接系统中最为重要的传动部件之一,它的性能直接决定对接过程的动力学特性以及对接的成败[4-5]。现有的空间对接机构多采用周边式对接机构,应提供可靠的刚性机械连接,具有吸收冲击动能的能力,保证机构不发生碰撞[6]。
基于我国卫星需完成在轨维护或维修、在轨加注、在轨功能扩展和软件升级等在轨服务任务的迫切需求,本文采用空间凸轮结构设计了一种对接装置,可实现服务卫星与目标卫星之间的在轨刚性对接,装置能够只在一台电机提供动力的基础上在轨可靠锁紧两航天器,具有结构成熟、碰撞接触力小、锁紧力大、运动平稳可靠等优点。
1 空间对接机构工作原理
1.1 空间对接装置结构
分析文献[3-9]中的各种对接装置,可知凸轮作为精确传动的主动件,在航天器上常有应用,用凸轮驱动锁销来实现对邻接物体的运动自由度,可以达到很高的精度,本设计的对接装置采取了这种机械方式,对接装置的整体结构如图1所示:

图1 对接装置结构
其各部分的功能如下:
1)锁紧组件。包括抱紧环、抱紧环滑座、十字销轴、抱紧座导轨等,实现抱紧和下压功能。抱紧环实现对对接环的抱紧;抱紧环滑座作为抱紧环的运动导轨,并在十字销轴的作用下带动抱紧环轴向运动;十字销轴作为传动件,通过抱紧环的曲线槽实现抱紧环及抱紧环滑座的规定运动;抱紧座导轨作为抱紧环滑座轴向运动的直线导轨。
2)驱动组件。包括弧形齿条、驱动环、转动座组件等,为抱紧组件和锁紧组件的运动提供动力。
3)缓冲器组件。用于减小目标星与对接装置接触时的刚性撞击,降低目标星的运动速度。
4)底架组件。用于连接服务星和对接装置。
1.2 空间凸轮机构工作原理
空间凸轮机构的工作过程分为抱紧、下压、压紧板后撤和释放4个过程。工作过程的运动简图如图2所示:
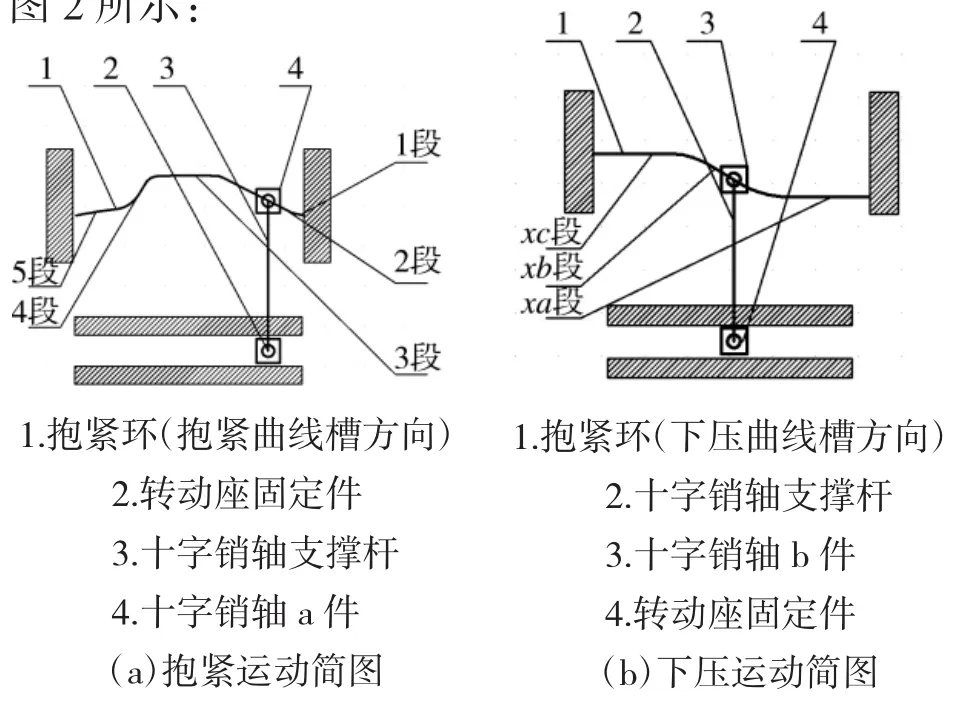
图2 凸轮机构工作过程简图
当目标星被捕获拉回到预定范围内时,电机启动,转动座随驱动环以恒定的角速度转动。从图2可以看出:当转动座运动到抱紧动作1段时,下压动作运动到xa段,抱紧动作、下压动作保持初始状态;当转动座运动到抱紧动作2段时,抱紧环实施对对接环的抱紧;当转动座运动到抱紧动作3段时,对接环完全被抱紧,下压动作运动到xb段,实施对对接环的下压;当转动座运动到下压动作xc段时,下压到位,完成整个锁紧过程。同时,在锁紧过程中,缓冲组件会被对接环压缩,此动作有效地减少了对接环在对接过程中的撞击,并且为对接环的释放储存了必要的能量。
在完成对目标星的服务任务后,对接装置中的电机被激活继续正转,当转动座运动到抱紧动作4段时,抱紧环快速后撤,在缓冲组件所储能量的作用下,对接环被释放。至此,锁紧与释放动作全部完成。
2 空间凸轮曲线传动特性数学建模
2.1 数学模型的假设
对接装置的运动和受力较为复杂,为了有效地将复杂问题简单化,便于分析机构运动,对模型进行一定的简化和假设。
1)不考虑空间低温环境对运动件的影响;
2)不考虑各零部件的公差和误差;
3)忽略电机启动的加速过程,仅对该装置的位移、速度及加速度进行分析。
2.2 运动规律的分析
凸轮机构要求压紧板沿径向的位移为30 mm,沿对接环轴向位移为40 mm,其运动规律由从动件的位移、速度、加速度来表示。通过对对接装置整个工作过程的分析,可以计算出抱紧及下压动作中各部分构件所对应基础构件(驱动环)的位移,其具体位移如图3所示。

图3 对接装置的工作循环图
2.3 数学模型的建立
由于凸轮机构都在驱动环的带动下运动,故两条凸轮曲线的数学模型均以圆柱坐标系为基础建立,并且在各曲线段之间采用倒圆角过渡。首先对下压凸轮曲线槽式(1)、抱紧凸轮曲线槽式(2)分别建立关于转角θ的数学模型。
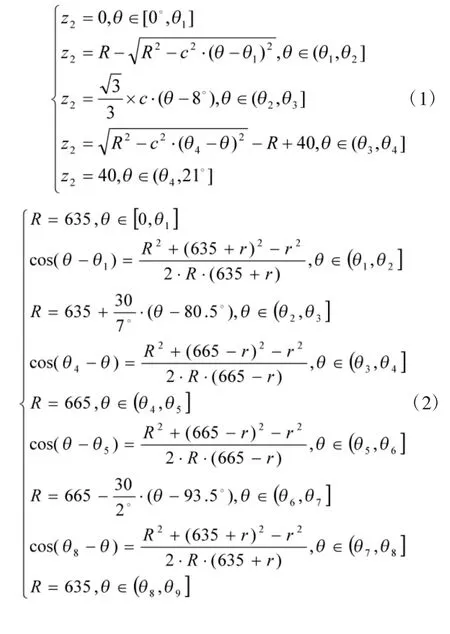
式中z2表示下压凸轮曲线槽位移,R表示抱紧凸轮曲线槽位移,θ表示驱动环的转角,它是关于时间t和驱动环角速度ω的函数,即θ=ω·t;c表示凸轮弧度到角度之间转换。
2.4 运动特性求解
用时间 t分别对式(1)、式(2)中 θ进行一次微分和二次微分,利用Matlab求解,可以得出两函数的速度和加速度曲线。
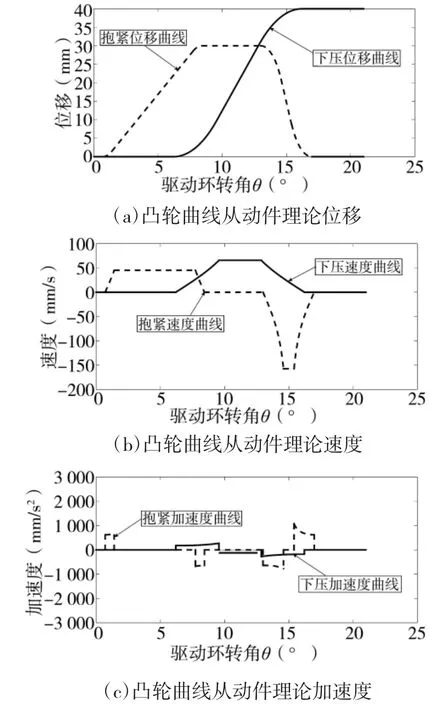
图4 凸轮曲线从动件理论传动特性曲线
计算结果表明,在对接过程中,抱紧、下压动作可按要求运动到位,抱紧动作最大速度为0.16 m/s,最大加速度为1.2 m/s2;下压动作最大速度为0.065 m/s,最大加速度为0.35 m/s2,凸轮机构可平稳可靠地锁紧目标星。
3 对接装置试验验证
3.1 试验的假设与简化
对接装置工作时所处太空环境较为复杂,在地面环境进行试验时,作出以下假设。
1)不考虑空间低温环境对运动件的影响;
2)忽略太空中电磁波等辐射对电子元器件的影响。
3.2 原理样机试验验证
根据机构设计方案,开展了原理样机的试制加工,完成了对接装置的原理样机加工和装配。样机材料主要采用铝合金以及不锈钢等,且实现了对抱紧环、转动座等关键件尺寸的精确控制。

图5 对接装置加工原理样机图
为进一步研究对接装置凸轮机构实际运动规律,在已有的物理样机上,分别在其抱紧与下压凸轮曲线从动件正面合理位置上贴标记点(具体位置如图6所示)。此外需合理调节高速摄像机的位置以及摄像机的焦距,摄像机放置时使摄像头正对凸轮曲线从动件,调节焦距时要保证能拍摄到电机正转的全过程。试验时驱动环以3.5 r/min的角速度转动,利用高速摄像机拍摄凸轮曲线从动件的运动过程,摄像频率为 250 帧 /s,并用 Zootracer[10]视频图像处理软件追踪并绘制凸轮曲线从动件的运动轨迹(如图7所示),最终以点的坐标形式输出。使用Matlab软件绘制凸轮曲线从动件的实际位移、速度以及加速度,并与理论曲线进行比较。
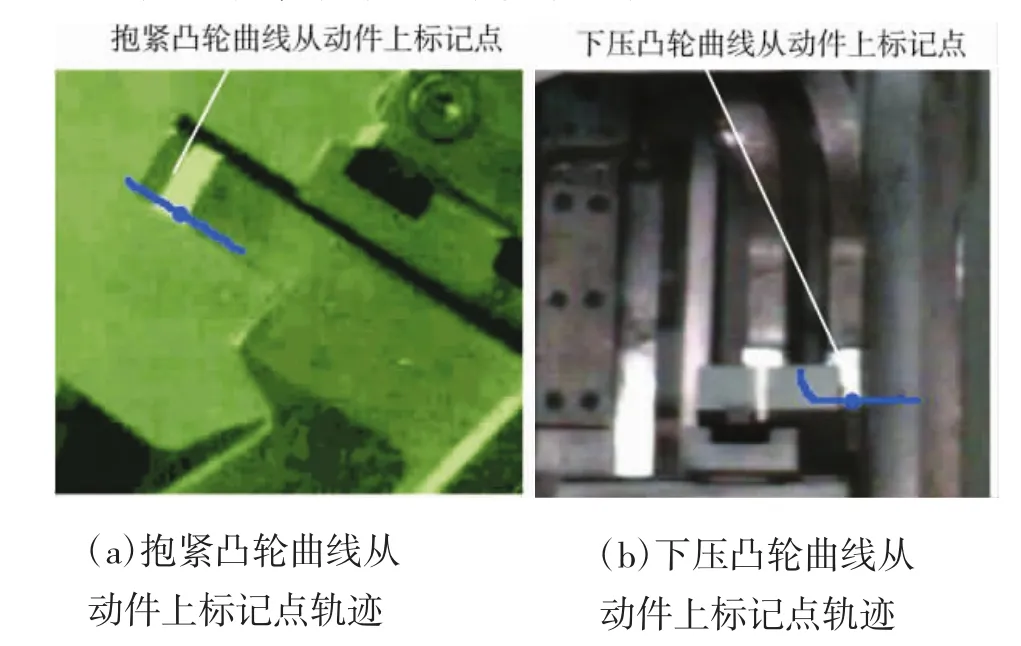
图6 凸轮曲线从动件的运动轨迹
试验结果表明,抱紧、下压动作可精确运动到位,运动过程中无卡滞现象,实际抱紧动作最大速度为0.146 m/s,最大加速度为1.6 m/s2;实际下压动作最大速度为0.075 m/s,最大加速度为0.48 m/s2,机构运动平缓、稳定性高。
将试验结果与建模理论结果进行比较,试验的凸轮曲线从动件位移及速度与仿真的凸轮曲线从动件位移及速度高度吻合,由此可以看出对接装置运动平稳可靠,速度最大值误差在15%之内,加速度最大值误差在37%之内。产生误差的主要原因:1)零部件之间不可避免地会存在间隙;2)零部件之间相对运动时会发生碰撞;3)零部件表面粗糙度大,润滑差;4)使用Zootracer视频图像分析软件时,标记点的拾取存在误差。

图7 凸轮曲线从动件的实际传动特性曲线
4 结论
为完成某种新型GEO卫星在轨服务对接技术要求,本文使用凸轮机构设计的对接装置在只有一台电机提供动力的条件下,能够通过空间凸轮机构进行时序控制,从而能使对接装置可靠地对目标卫星配合完成抱紧和下拉锁紧等动作。缓冲件在碰撞时能有效地起到缓冲作用,减小了对各机构的损坏。建立了机构的数学模型,通过求解分析初步证明了所设计机构的可行性。同时,利用高速摄像和视频图像处理技术对对接装置物理样机进行运动学特性测试试验,试验结果与理论计算结果基本一致,证明了此对接装置运动平稳、可靠性高,可以达到预期的设计目标,也为此对接装置的进一步优化设计提供了重要依据。
猜你喜欢
辽宁工业大学学报(自然科学版)(2022年3期)2022-07-16
当代水产(2022年6期)2022-06-29
能源工程(2022年2期)2022-05-23
太阳能(2022年1期)2022-03-05
商用汽车(2021年4期)2021-10-13
舰船科学技术(2021年12期)2021-03-29
绿色科技(2019年10期)2019-06-17
科技视界(2018年21期)2018-12-10
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
