基于LS-SVM方向判别模型的WLAN室内定位方法
2019-06-13 02:46:22李石荣何富贵朱雪梅
井冈山大学学报(自然科学版) 2019年3期
李石荣,何富贵,朱雪梅
基于LS-SVM方向判别模型的WLAN室内定位方法
李石荣1,何富贵1,*朱雪梅2
(1. 皖西学院电子与信息工程学院,安徽,六安 237012;2. 皖西学院实验实训管理部,安徽,六安 237012;)
为解决WLAN室内定位中信号在传播过程受人体遮挡产生阴影衰落而影响定位精度的问题,提出了一种最小二乘法支持向量机(LS-SVM)方向判别模型的WLAN室内定位方法。该方法主要分为两个部分:首先,充分利用人体在不同遮挡方向上产生阴影衰落的接收信号强度变化(RSS)特征信息,判定人体遮挡方向;然后,通过LS-SVM回归算法建立指纹点特征数据与位置之间的映射关系获取定位点位置结果。实验结果表明,与传统利用SVM的定位方法相比,提出的方向判别模型可解决人体遮挡产生的阴影衰落影响定位精度的问题,提高了定位的实用性和鲁棒性。
接收信号强度变化;室内定位;阴影衰落;最小二乘法支持向量机;方向判别模型
0 引言
近年来,随着无线网络与计算机的发展应用,基于位置的服务(LBS)受到了越来越多的关注,而高精度的定位系统是LBS的重要研究方向之一。当前GPS在室外定位和导航领域效果较好,然而该技术并不能移植于室内环境中,因而解决室内定位技术成为了当前的一个难点。
现有的室内定位技术有基于Wi-Fi[1]、蓝牙[2]、Zigbee[3]和RFID[4]等,当前解决室内定位的方法主要有基于到达时间和时间差(TOA/TDOA),到达方向(DOA)和接收信号强度(RSS)等。文献[5]和文献[6]分别对当前室内定位领域中的技术和方法进行了比较,文献[6]对定位技术进行了总结并提出了未来定位技术的精度标准。其中以基于RSS为基础的WLAN室内定位技术由于其设备简单、成本低和定位精度较高的特点而得到了广泛的研究和应用[7]。同时由于智能手机和平板电脑等终端设备使用的不断普及和无线路由器在公共场所的广泛覆盖,人们可以方便地通过携带的终端设备来实现室内定位和导航。文献[8]和文献[9]提出了基于信号强度分布概率和相似度的定位方法,利用分布概率解决信号时变性对定位的影响。

为解决人体遮挡产生的阴影衰落影响定位精度的问题,本文提出了一种基于LSSVM的方向判别模型的室内定位方法,通过不同遮挡方向上RSS特征差异建立方向判别模型来提高定位精度。离线阶段,将360°平均分成8类遮挡方向采集人体8个遮挡方向上的RSS数据,获取每个方向上的指纹点数据库。利用SVM算法建立每个方向上的RSS指纹数据与对应方向上多对一映射关系——方向判别模型;通过指纹点RSS特征信息建立数据与位置之间的关系——定位模型。在线阶段,利用方向判别模型选取定位点的人体遮挡方向,通过该方向建立的指纹点数据与位置的映射关系获取定位结果。实验结果表明,本文提出的模型在方向判别上的准确度达到了70%左右,降低了人体遮挡产生的阴影衰落对定位的影响,提高了定位的工程实用性和鲁棒性。
1 定位方法和实验原理
离线阶段,利用LS-SVM算法建立方向判别模型,如图1所示。利用每个遮挡方向上的特征信息建立方向判别模型。利用指纹点上的特征信息建立定位模型。利用方向判别模型对定位点进行方向判别,利用定位模型对位置进行估计获取定位结果。
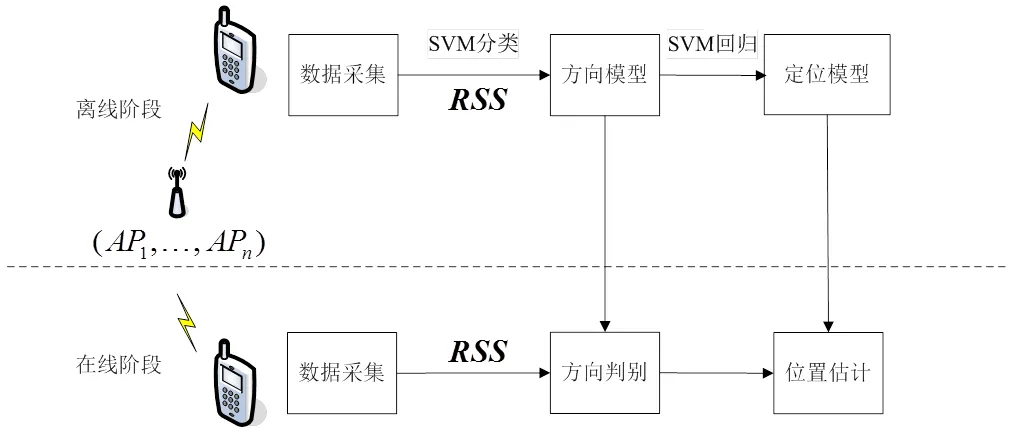
图1 定位系统框图
1.1 信号衰减模型
文献[19]中描述了室内信号传播受具体的环境影响,信号传播损耗模型描述信号的衰减主要受地板层和隔墙的影响,衰减损耗的强弱因遮挡材质的不同而存在差别。路径损耗经验模型可表示为:

1.2 方向判别模型
室内定位过程中由于人体的遮挡使得RSS存在较大的差异,影响了定位精度。由于不同的遮挡方向下信号衰落具有一定的方向特性,通过分析方向性特征信息获取用户遮挡方向,建立方向判别模型,如图2所示。离线阶段,将遮挡方向平均划分为8个遮挡方向,采集指纹点RSS和方向信息,利用LSSVM分类算法建立方向判别模型;在线阶段,对定位点RSS数据进行方向判别,利用判别方向和建立的定位映射模型获取定位结果。
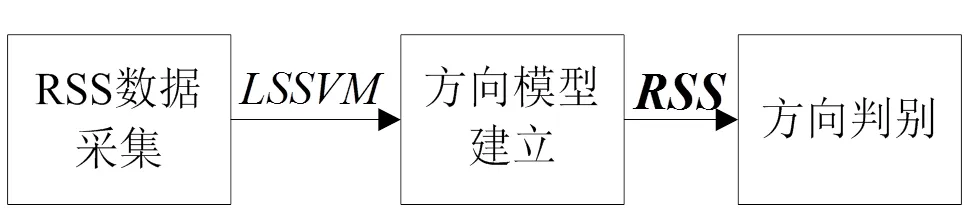
图2 方向判别模型图
1.3 定位过程

1.3.1 方向判别模型
对指纹点数据进行训练获取分类模型,首先通过将问题转化为等式约束问题[20]:



将公式(4)转换成求矩阵解的问题:

1.3.2定位回归模型
同理引入拉格朗日乘子并对参数求偏导可得下面方程:


2 实验结果与分析
2.1 实验条件


图3 实验室分布图
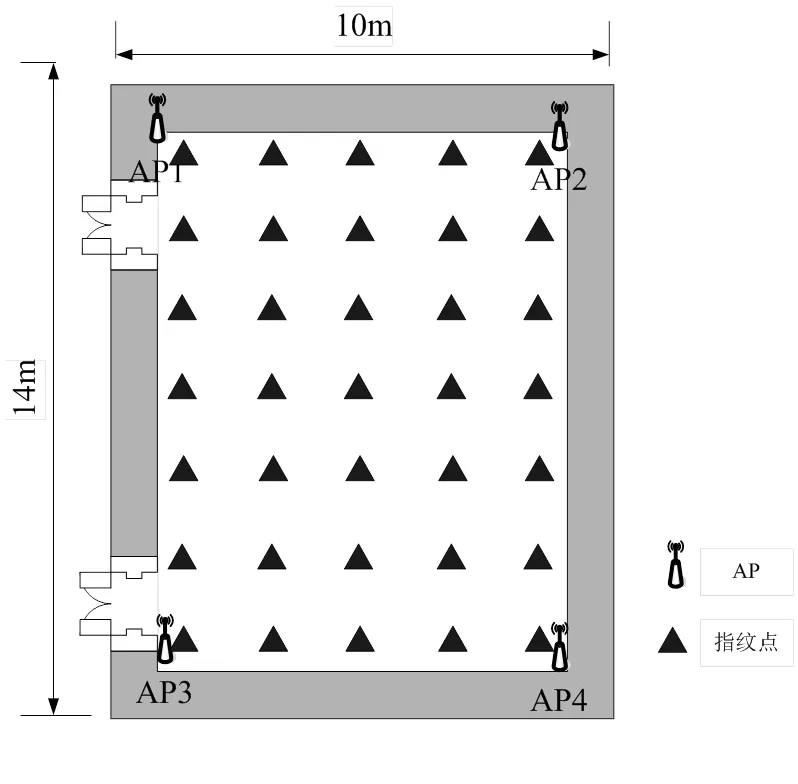
图4 实验环境
2.2 数据采集与处理
离线阶段,指纹点上8个遮挡方向上进行数据采集;为保证数据采集稳定性,数据采集次数为50次,采样间隔为0.1 s,利用均值滤波算法对30组数据进行均值处理,减小外界干扰。经过处理后,可以得到每个指纹点在8个遮挡方向上,每个遮挡方向上25个指纹点RSS数据共200个指纹点的数据库。在线阶段,采集定位点RSS数据并处理,通过方向判别模型估计角度并判定方向,在该判定角度方向下建立RSS数据与位置的映射关系获取定位结果。
为验证阴影效应对定位精度的影响,本文在四种条件下对数据进行分析与比较。
条件一:认为人体遮挡无影响,直接利用方向判别模型获取位置结果(LS-SVM);
条件二:考虑人体遮挡因素,利用方向模型(Direction Model,DM)和定位模型获取位置结果(LS-SVM+DM);
条件三:考虑人体遮挡因素但不使用方向判别模型,利用8个方向上的所有RSS数据作为指纹点数据库,建立定位模型,最后利用定位模型获取位置结果(LS-SVM+8方向);
条件四:考虑人体遮挡因素,确定某个遮挡方向,利用定位模型获取位置结果(LS-SVM+定向)。
2.3 阴影衰落的影响
本实验通过在MATLAB2010b中LS-SVM工具箱对收集的测试点数据进行处理,可以得到遮挡方向对RSS产生的阴影衰落噪声大小。图5可以看到在某个位置上8个不同的遮挡方向下4个AP的RSS的变化情况,其中AP3在方向2和方向4上的RSS变化差值最大达到了30 dBm,而AP4的RSS变化最大差值甚至也能达到19 dBm。可见人体的遮挡对信号的传播存在影响,因而在实际定位过程中,人体的遮挡也成为了一个不可忽略的因素。

图5 不同遮挡方向上的4个AP的RSS变化情况
2.4 定位实验结果分析
图6所示为判定测试点人体遮挡方向角度误差与相应累积概率分布之间的对应关系。可以看出,当方向误差设为45度时,方向判定准确度为68.2%;当方向误差设为75度时,方向判定准确度达到了83.3%。
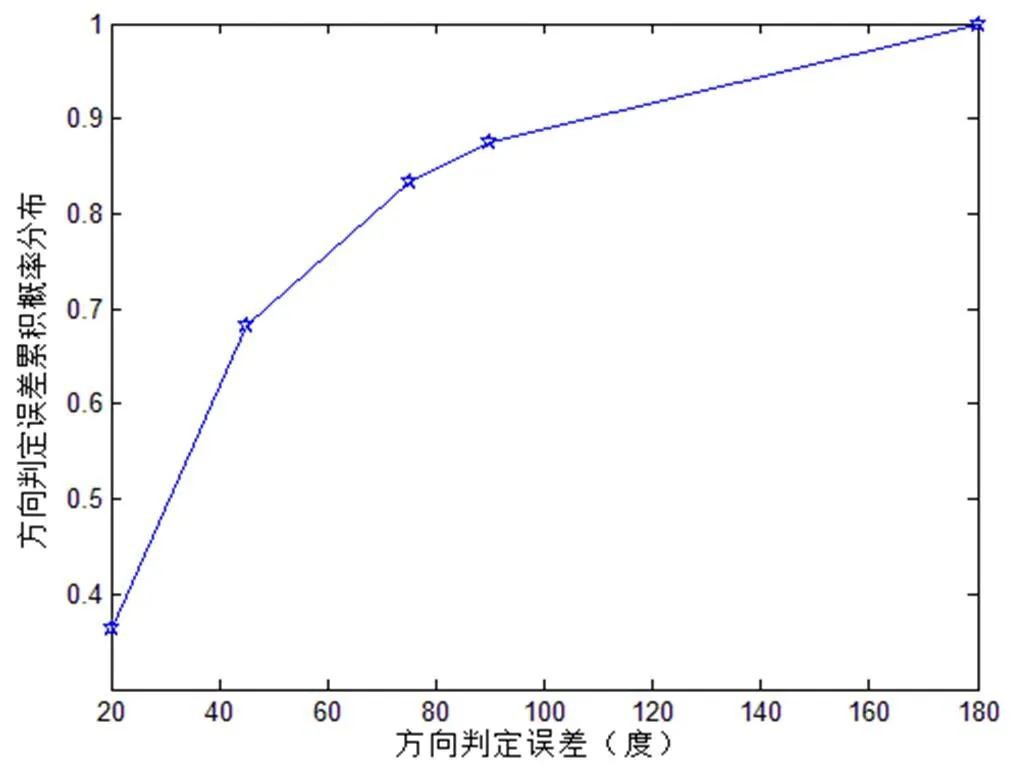
图6 方向判定误差的累积概率分布
图6中可以看出在实际定位过程中,人体的遮挡呈现一定规律的方向性。
图7为四种条件下定位误差与累计概率分布之间的关系,当定位精度3 m以内时,四种条件下累计概率分别为24.6%,53.3%,45.7%和66.7%。定位误差设定为4 m时,各自的定位精度分别为40.1%,73.2%,71.1%和84.5%。

图7 四种条件下的定位误差的累积概率分布
图7中可以看出考虑人体遮挡产生的阴影效应对定位精度有着明显的提升,条件二中判定方向后的平均定位误差约为3.32 m,而条件一、条件三和条件四下的平均定位精度依次为5.01 m,3.03 m和2.24 m。实验结果表明,条件二和条件三中考虑了人体遮挡的阴影效应后平均定位精度分别降低了1.69 m和1.98 m。但与规定在相同的遮挡方向下相比,平均定位精度仍存在1.08 m和0.79 m的差距。但总体上定位精度得到了较大的改善。
图8(a)~图8(d)分别给出了在传统基于SVM分类、SVM回归、WKNN和SVM多分类条件下,引入方向判别模型(DM)后定位精度的对比。实验结果显示,方向判别模型条件下基于SVM分类、SVM回归、WKNN和SVM多分类的定位精度分别由5.32 m、5.43 m、5.16 m和4.98 m降低为3.17 m、3.13 m、2.98 m和3.12 m,定位精度分别提高了40.4%、42.4%、42.5%和37.3%。
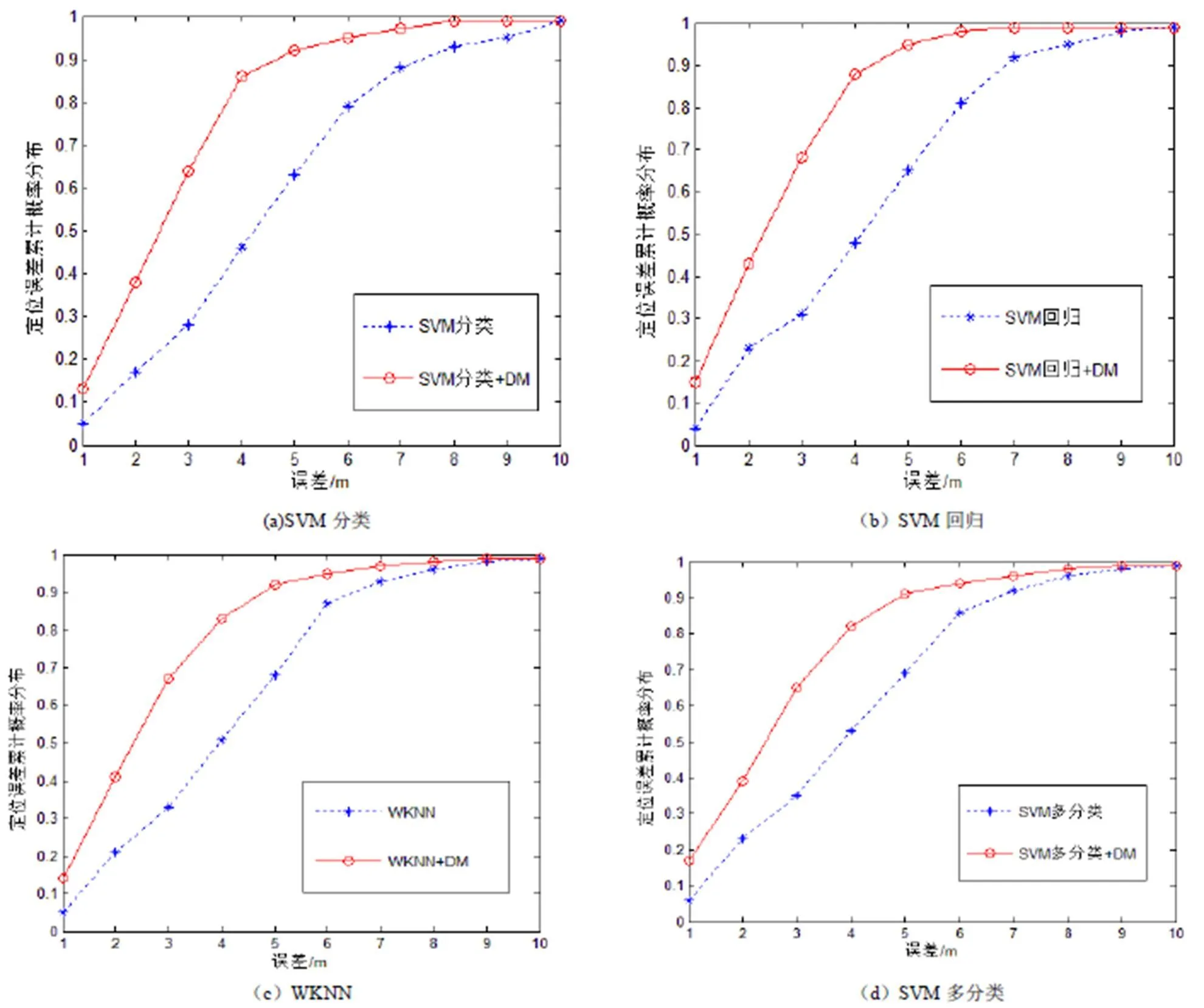
图8 方向判别模型对定位的影响
2.5 遮挡方向对定位的影响
图9给出了实验环境中实验室室内环境的两种不同区域条件下定位精度的比较。实验结果表明,当人体面朝AP2方向时,在定位区域2上的定位精度高于定位区域1,区域2和区域1上的平均定位精度分别为1.42 m和1.96 m。由于在区域1上人体对设备的信号的遮挡有AP1、AP4和AP4,而在区域2上对信号的遮挡只存在AP4,当人体对信号遮挡时,会降低RSS信号定位特征信息,增大的定位误差。

图9 不同定位区域下定位误差的比较
3 结束语
本文主要研究WLAN室内定位过程中人体遮挡对定位的影响,提出了一种基于LS-SVM方向判别模型的WLAN室内定位方法。该模型减小了在室内定位过程中人体遮挡对定位精度的影响,利用LS-SVM回归算法提取RSS衰落噪声特征信息差异来判定遮挡方向,最后利用定位模型获取定位结果。实验结果表明,用户遮挡方向对RSS影响较大,不同遮挡方向上RSS存在特征信息。同时,如何更加充分利用衰落噪声准确的判定方向,可以利用不同遮挡方向RSS值的补偿来减小离线工作量采集工作,有待下一步研究。
[1] 吴泽泰,蔡仁钦,徐书燕,等. 基于K近邻法的Wi-Fi定位研究与改进[J].计算机工程,2017,43:289-293.
[2] Zhou S, Pollard J K. Position measurement using Bluetooth [J].IEEE Transactions on consumer electronics, 2006,52:555-558.
[3] Leh L. ZigBee-based intelligent indoor positioning system soft computing[J].Soft Computing,2014, 18:443-456.
[4] 李强,王玫,刘争红. 基于RFID覆盖扫描的标签定位方法[J].计算机工程,2017,43:294-298.
[5] Xiao J H, Liu Z, Yang Y, et al. Comparison and analysis of indoor wireless position in techniques[C].International Conference on Computer Science and Service System (CSSS),2011:293-296.
[6] Deng Z L, Yu Y P, Yuan X, et al. Situation and development tendency of indoor positioning [J].China Communications, 2013,10:42-55.
[7] Xia S X, Liu Y, Yuan G, et al. Indoor Fingerprint Positioning Based on Wi-Fi: An Overview[J]. International Journal of Geo-Information,2017,6:135.
[8] 李石荣,李飞腾. 基于RSS 概率统计分布的室内定位方法[J].计算机工程与应用,2016,52:119-124.
[9] 朱雪梅,李石荣. 基于RSS分布重叠的WKNN室内定位方法[J].徐州工程学院学报,2017,32.48-52.
[10] 覃团发,姚海涛,覃远年,等. 移动通信[M].重庆:重庆大学出版社,2004:56-74.
[11] Luo J Y,Zhan X Q. Characterization of smart phone received signal strength indication for WLAN indoor positioning accuracy improvement. Journal of Networks, 2014, 9:1061-1065.
[12] 张明华,张申生,曹健. 无线局域网中基于信号强度的室内定位[J].计算机科学,2014,41:68-71.
[13] Basheer M R, Jagannathan S. Localization and Tracking of Objects Using Cross-Correlation of Shadow Fading Noise[J]. IEEE Transactions on Mobile Computing. 2014, 13:2293-2305.
[14] 陈斌涛,刘任任,陈益强,等. 动态环境中的Wi-Fi指纹自适应室内定位方法[J].传感技术学报,2015,28:729-738.
[15] 张勇,徐小龙,徐科宇. 基于加权质心法的WLAN室内定位系统[J].电子测量与仪器学报,2015,29:1036-1041.
[16] 韦燕华,周彦,王冬丽. 基于LS-SVM的位置指纹室内定位[J].计算机工程与应用,2016,52:122-125.
[17] 朱宇佳,邓中亮,刘文龙,等. 基于支持向量机多分类的室内定位系统[J].计算机科学, 2012,39:32-35.
[18] 桑楠,袁兴中,周瑞. 基于SVM分类和回归的WiFi室内定位方法[J].计算机应用研究,2014,31:1820-1823.
[19] Molisch A F. Wireless Communications [M].Wiley, 2011:39-62.
[20] 邓乃扬,田英杰. 支持向量机:理论、算法与拓展[M].北京:科学出版社,2009:81-115.
WLAN INDOOR POSITIONING METHOD BASED ON DIRECTIONAL DISCRIMINATION MODEL OFLS-SVM
LI Shi-rong1, HE Fu-gui1,*ZHU Xue-mei2
(1.Department of Electronic Information and Engineering, West Anhui University, Lu’an, Anhui 237012, China 2.Department of Experimental and Training Management, West Anhui University, Lu’an, Anhui 237012, China;)
In order to solve the problem of positioning accuracy error caused by body blocking in the process of WLAN indoor positioning, a WLAN indoor positioning method called Direction Discrimination Model (DDM) is proposed based on Least Squares Support Vector Machine (LS-SVM) algorithm.The method is mainly divided into two parts: First, the body's obstruction direction is determined with the information of the Received Signal Strength (RSS) changes in the shaded fading caused by the human body in different directions of obstruction; Then, the LS-SVMregression algorithm is used to establish the mapping relationship between the fingerprint point feature data and the location to obtain the positioning point location result.The experimental results show that the proposed direction discrimination model reduces the influence of shadow fading caused by human shadows on positioning accuracy and improves the practicability and robustness of positioning,compared with the traditional positioning method based on SVM.
RSS; indoor positioning; shadow fading; LS-SVM
1674-8085(2019)03-0043-07
TP391
A
10.3969/j.issn.1674-8085.2019.03.008
2018-10-28;
2019-02-05
国家自然科学基金青年项目(61702375);皖西学院青年项目(WXZR201806)
李石荣(1989-),男,安徽六安人,助教,硕士,主要从事网络信号处理、室内定位技术等研究(E-mail:506822995@qq.com);
何富贵(1982-),男,安徽安庆人,副教授,博士,主要从事计算机技术,网络分析,物联网应用等研究(E-mail:253446191@qq.com);
*朱雪梅(1987-),女,安徽阜阳人,讲师,硕士,主要从事无线通信、室内定位技术、电子技术应用等研究(E-mail:499835172@qq.com).
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
小哥白尼(趣味科学)(2022年1期)2022-04-26 14:21:08
大科技·百科新说(2021年10期)2021-12-31 07:24:02
基层中医药(2021年5期)2021-07-31 07:58:34
小哥白尼(趣味科学)(2021年11期)2021-02-28 08:35:00
小天使·一年级语数英综合(2020年10期)2020-12-16 02:57:11
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
特别健康(2018年3期)2018-07-04 00:40:10
自动化学报(2016年8期)2016-04-16 03:39:00