
光载一机多天线远程GNSS差分监测系统
2019-06-13 07:13刘璞宇邹喜华闫连山
雷达学报 2019年2期
刘璞宇 邹喜华 李 阳 闫连山 潘 炜
(西南交通大学信息科学与技术学院 成都 611756)
1 引言
基于全球导航卫星系统(Global Navigation Satellite System, GNSS)的定位方法,具有精度高、全天候、测点之间非视距等优点,成为当今广泛应用的监测手段[1]。例如基于GPS(Global Positioning System,全球定位系统)的变形监测系统已经成功应用在南浦大桥[2],三峡库区滑坡[3],西龙池上水库[4]等工程结构,测量结果的重复性可达毫米量级;近年来随着我国北斗导航系统的发展,基于北斗导航系统对海洋环境[5],东北区域[6],区域性地面沉降[7]动态变形监测也逐渐得到了广泛应用,并且表现出了和GPS系统相当的性能;在此基础上,文献[8—10]使用GNSS技术对桥梁结构进行动态变形监测,得到了相应的时间位移序列并进行快速傅里叶变换(Fast Fourier Transformation,FFT)处理,分析了其动态特性,但该监测系统包含了多台GPS接收机,增加了整个系统的成本。
对于监测系统中使用多个接收机导致的成本高昂问题,一机多天线系统被提出[11],该系统利用多天线控制器切换信号,使多个天线连接到接收机;在一些大型工程环境下的变形监测系统中可节约大量成本,并且已成功地应用于大型桥梁[12],高速公路边坡监测[13],滑坡监测[14]等系统中;并且随着多系统融合定位的广泛应用,基于GNSS的一机多天线远程监测系统被设计研发出来[15]。然而,多天线控制器切换速度慢,会造成卫星信号失锁和周跳等情况,需在后期对切换信号时段进行处理,并且在上述系统中GNSS信号通过电缆或无线网络传输至接收机,前者由于其损耗大的特性造成GNSS信号难以远距离传输,后者在一些山区尤其信号不好的地方难以工作,极大地限制了其应用范围。
为了解决传统GNSS监测系统存在的问题,一种结合了微波光子学的大带宽微波信号的传输与处理方法[16]和GNSS高精度定位技术的光载GNSS系统被提出[17];文献[18,19]用直调激光器把GPS射频信号调制到光载波上,经过光纤传输后进行探测和解调,探索了光载GPS系统在飞机姿态测量中的应用;文献[20]进一步验证了光载GPS的有效性,得到了毫米量级的实时测量结果;文献[21]提出了一种光载一机多天线GPS同步差分架构,把实时监测到的相对硬件延迟补偿到载波相位观测值中,后期处理后测量结果的垂直精度可提高到与水平精度相当的程度;在此基础上,结合GNSS和微波光子技术在GPS频率测量稳定性[22],大型复杂基础设施的结构健康监测[23],植被对干旱响应监测[24]等方面有了更进一步的发展。
本文提出了一种光载一机多天线远程GNSS差分监测系统。通过定时控制光开关切换通道,轮流收集远端多个GNSS信号,实现大规模远程监测位置的高精度(mm级)实时监测;并且该系统结构可以与现有商用接收机有效融合,无需额外的开发费用。相较于文献[15],本文利用损耗低、抗电磁干扰强的光纤作为GNSS信号的传输介质,可极大地提升监测区域和覆盖范围,并且由于光开关的响应时间极短,切换信号时接收机对于连续跟踪卫星和避免产生周跳等性能有一定程度的改善;相较于文献[2]和文献[18,19],只需要一个接收机就可以得到远程大规模监测点的测量结果,大幅度降低了系统成本;相较于文献[20],无需改变现有接收机结构,便可以大规模布设远程监测点,降低了构建整个系统的复杂性。
2 GNSS载波相位差分定位原理
GNSS系统包括了GPS、北斗、GLONASS等多种定位系统,各个系统的定位原理基本类似。对于一些高精度定位应用场景(如结构变形监测领域),一般利用载波相位作为测量值进行相对定位。GNSS载波相位双差差分模型如图1所示。
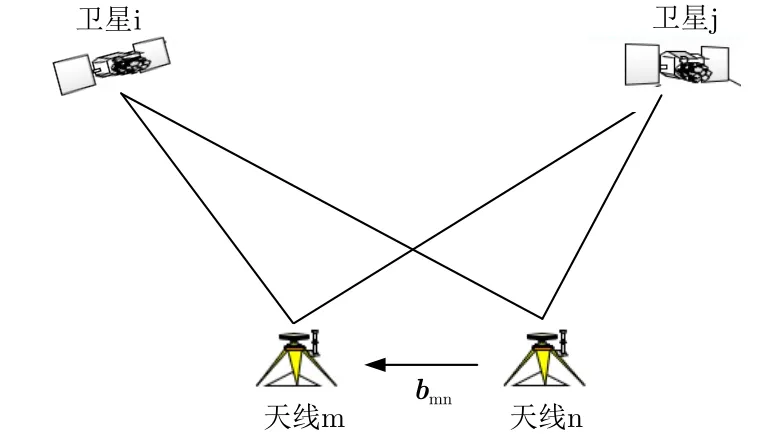
图1 双差差分示意图Fig.1 Illustration of double difference
由天线m 接收卫星i信号的单点载波相位观测方程可以表示为

其中,¸为GPS信号L1载波波长,为相位观测值,为天线m 到卫星i 的几何距离,δm为接收机接收到天线m 的钟差,δi为卫星i 钟差,为载波相位的整周模糊度(代表了卫星i 传播到天线m过程中的整数模糊度),为卫星i 到天线m的电离层,对流层偏差,为载波相位观测值噪声,Hm为引入光纤后天线m到接收机中间传输链路的时延。
而不同GNSS卫星信号从同一个天线到接收机的传输链路是一致的,因此其传输链路时延也是相同的,则天线m 接收卫星j信号的单点载波相位观测方程可写为

式(1)与式(2)相减可得到相同天线m 对不同卫星i,j的载波相位单差观测方程

从式(3)可以看出,星间单差观测方程消去了卫星钟差参数、由天线相位中心到接收机中间的传输时延。同理可得,相同天线n 对不同卫星i,j的载波相位观测方程为

式(3)与式(4)相减可得到同步观测的两个相同接收机对不同的卫星的双差观测方程

其中
从式(5)可以看出,接收机钟差项被消除。并且在小于15 km的短基线条件下,同一个卫星对不同接收机的电离层、对流层偏差具有强相关性(或近似相等),大气延迟项误差也被消除。假定卫星i 和天线m 之间的单点载波相位方程中观测值噪声符合正态分布,针对不同的卫星观测方程之间每多求一次差,则观测值噪声的均方根误差变为原来的倍。因此两个相同的接收机针对不同的卫星得到的双差差分观测方程观测值噪声比非差观测方程提高了2倍,对于垂直方向的精度有一定的影响。为把上述方程和求解的3维坐标联系起来,定义天线m 和基准天线n之间的基线向量为,等于基准天线n 对卫星i 观测方向上投影长度的相反数,表示为

当监测天线m 和基准天线n 共同对M颗不同的卫星产生载波相位测量值,由于观测值噪声相对载波相位码测量误差较小,故在此处可以忽略,由式(5)和式(7)可以得到

其中,上标1,2,···,M代表卫星序号。标号为1的卫星作为参考基准星,为了确保各个双差测量值的准确性,通常选用高仰角卫星作为参考卫星。与此同时式(8)中同一时刻的双差载波相位观测方程只剩下了M-1个;由于两个相同接收机对不同卫星得到的双差整周模糊度为整数,所以求解式(8)的实质是求出其双差整周模糊度的整数解,通常基于最小二乘的原理只能求出其浮点解(非整数)。于是将基于最小二乘原理得到的浮点解作为整数解的初始估计值,再用LAMBDA算法对整周模糊度向量空间进行搜索,最终得到整周模糊度的固定解(整数),然后回代到式(8)中,求解出基线向量,得到高精度的相对定位结果。
3 光载一机多天线实验方案与结果分析
根据上述原理,设计了一种光载一机多天线GNSS系统,实验方案如图2所示。远端由3个GNSS天线、偏置器、低噪声放大器和直调激光器组成,本地端由1×8高速光开关、光收发一体化模块、GNSS接收机以及电脑组成。GNSS天线接收来自卫星的GNSS信号,由于地面或略高于地面的GNSS天线接收到的GNSS射频信号电平很弱(如—130 dBm),使用偏置器给GNSS天线内置的低噪声放大器(增益40 dB)供电和额外的低噪声放大器(增益20 dB),确保GNSS射频信号在经过长距离光纤传输后被接收机有效接收。GNSS射频信号在直调激光器(光功率10 dBm,中心波长1550 nm)的调制下进行电光转换,把射频GNSS信号调制到光载波上,转换后的光信号经过光缆并通过1×8光开关(每个通道插入损耗大约为0.8 dB、相邻通道信号切换时间小于10 ms)进行定时切换、信号传输,在到达接收端时被光收发一体化模块所探测到并进行光电转换,把还原的射频GNSS信号送入接收机,解调出导航电文信息、载波相位观测值等数据。与此同时,基准点GNSS信号同样采用上述方法传输至本地端,得到基准点GNSS信号的导航电文、载波相位观测值等数据;不同的是基准点作为双差差分模型的参考点,并且调制后的光载波同时送入光收发一体化模块中,实现本地端的集成化。最后在电脑上对基准点和监测点GNSS信号的数据进行处理和性能分析。实验中,采用自主研发的四通道光收发一体化模块,集成了4个直调激光器和4个光电探测器,传输带宽大于15 GHz。
本次实验在西南交通大学犀浦校区9号教学楼楼顶进行,通过在楼顶布置4个GNSS天线节点(其中3个为监测节点,1个为基准节点),3个远端监测点GNSS信号和1个基准点GNSS信号分别经过10 km和1 km单模光纤回传到5楼室内本地端。并且根据事先人工大致测量,监测点1, 2, 3相对基准点的距离大致为44 m, 59 m, 27 m。图3(a)为楼顶现场平面布置图,图3(b)为实验实物图。本次实验中为了更好地反映出实时定位结果,所有的接收机采样率设置为1 Hz;同时为了接收到较好的GNSS信号数据,卫星截止角被设置为10°。为了更好地分析GNSS信号的数据质量,在两次实验中给出了GPS的G02, G13和北斗的C142, C143一共4颗卫星的载噪比(Carrier Noise Ratio, CNR)。

图2 光载一机多天线GNSS监测系统架构Fig.2 Block diagram of the designed multi−antenna GNSS−over−fiber system

图3 光载一机多天线监测实验Fig.3 Experiment for the designed multi−antenna system
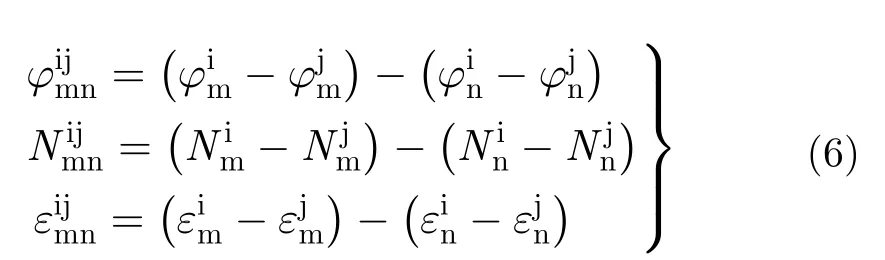
首先,在一机单天线系统中每个监测点的观测持续15 min (900个历元)。监测点1,2,3的每个历元的基线长度实时监测结果和4颗卫星的CNR测量结果分别如图4—图6所示,其中,红线表示整个观测时段基线长度监测结果的平均值,基线长度为3维坐标分量取模。从图4—图6中可以看出,在光载一机单天线GNSS系统中GPS系统的G02, G13和北斗系统的C142, C143卫星载噪比均保持在40~50 dB/Hz这一良好的范围内,并且各监测点实时解算出基线长度波动变化均为毫米量级,这一结果和预期相符。
然后,在光载一机多天线GNSS系统实验中:定时收集远端的GNSS信号,时间间隔设置为5 min和10 min。对10 min间隔、5 min间隔时各个监测点定位结果和CNR进行测量和分析,如图7和图8所示。同时,分别在两种时间间隔下提取了200,800, 1400历元和200, 500, 800历元时的基线长度值,并在图7和图8中用红色的数字标注。从图7和图8中可以看出:光开关切换GNSS信号时,基线长度出现了剧烈跳变;这是因为对式(8)求解时,用LAMBDA算法搜索模糊度空间求出整数解时,需要一定的时间完成迭代。此外,其中G02号卫星载噪比出现了逐渐下降的情况,这是卫星在观测过程中不断运动而逐渐脱离天线接收范围所造成的。
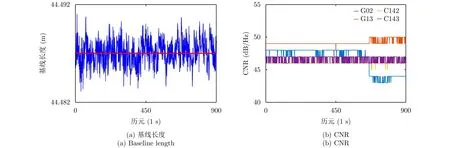
图4 监测点1的基线长度和CNRFig.4 Baseline length and CNR obtained from the monitoring point 1
图5 监测点2的基线长度和CNRFig.5 Baseline length and CNR obtained from monitoring point 2

图6 监测点3的基线长度和CNRFig.6 Baseline length and CNR obtained from the monitoring point 3
最后,为了更详细地比较两种系统下定位结果的精度,基于两种不同系统分别计算了监测点1, 2,3在观测过程中的E, N, U方向的平均值和标准差,如表1所示。其中,在一机多天线系统中除去了重新求解整周模糊度的时间(切换信号后1 min),各个监测点的E, N, U坐标方向由基准点建立。从表中可以看出在上述两种系统中,各个监测点具有大致相等的测量结果和定位精度,且3维坐标分量和基线长度的实时测量精度均达到毫米量级。
4 结束语
本文设计了一种光载一机多天线GNSS差分监测系统,有机结合了微波光子学和GNSS定位技术;通过实验论证了仅用一个GNSS接收机就可以互不干扰地接收远端多个GNSS天线回传至本地端的信号,从而得到远端多个监测点的高精度实时定位结果。该监测方案可以极大提高大规模监测的性价比,在大型土建工程、自然环境大规模监测方面具有重要应用价值。

图7 一机多天线下测量的基线长度和CNR (10 min间隔)Fig.7 Baseline length result and SNR of multi−antenna (Interval of 10 min)
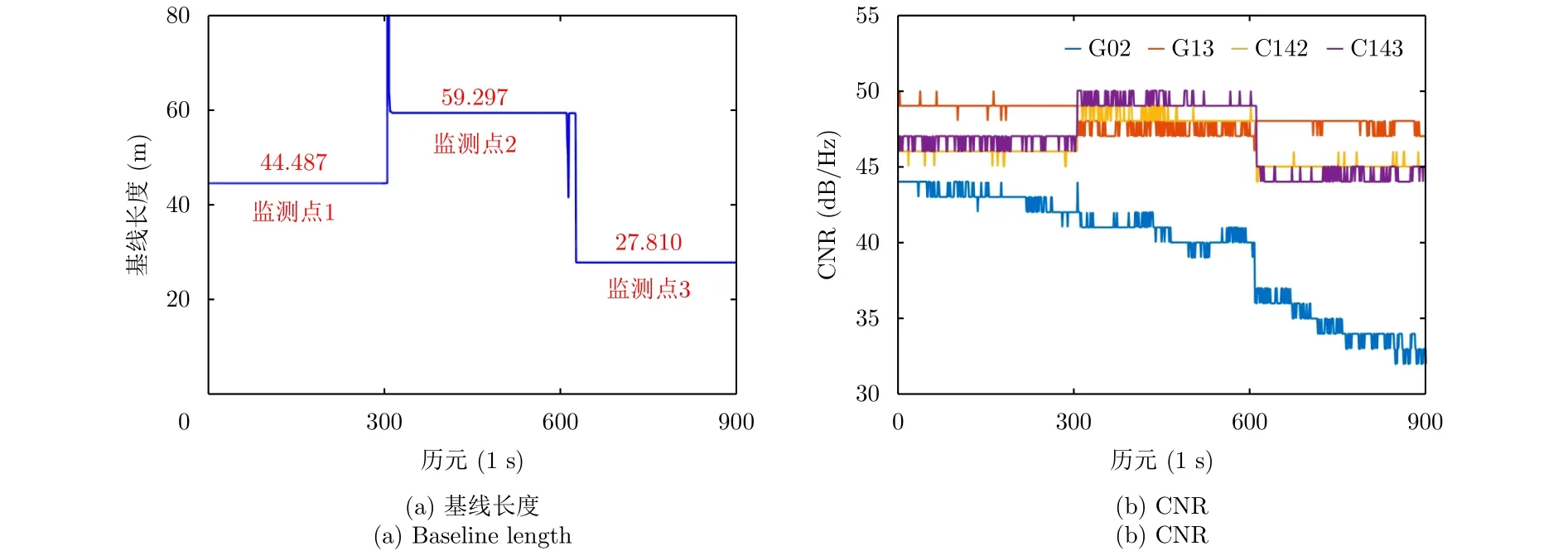
图8 一机多天线下测量的基线长度和CNR (5 min间隔)Fig.8 Baseline lengths and CNR measured by the multi−antenna over fiber system (Interval of 5 min)
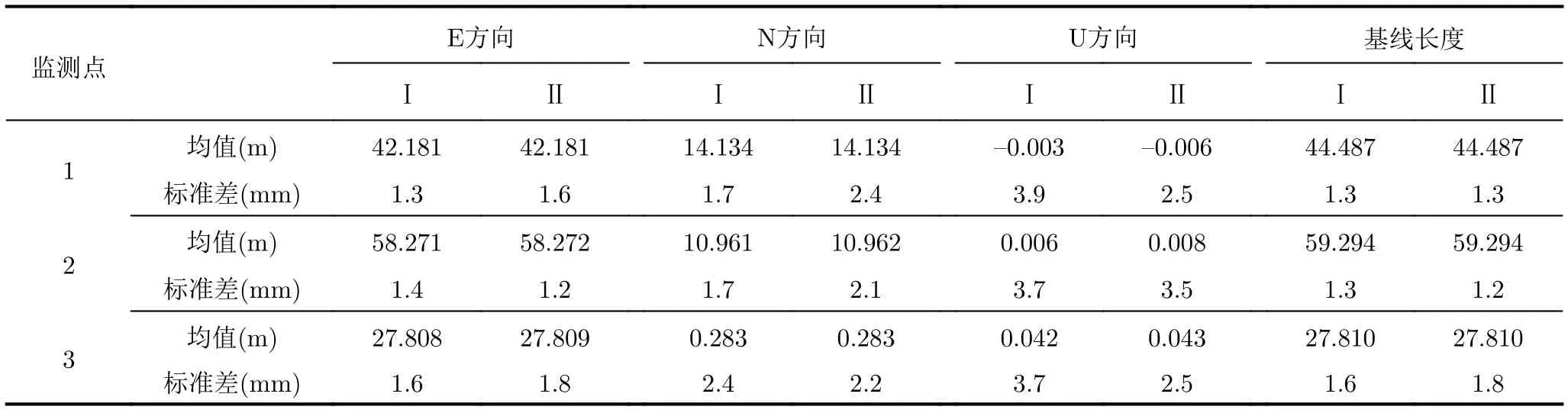
表1 监测点1, 2, 3的E, N, U方向的平均值和标准差(Ⅰ:一机单天线GNSS系统.Ⅱ:光载一机多天线GNSS系统)Tab.1 Mean values and standard deviations in E, N and U directions of monitoring point 1, 2, 3(Ⅰ: One-antenna GNSS system.Ⅱ: Multi-antenna GNSS system)
此外,关于实验方案和结果的讨论如下:(1)采用的载波相位双差差分模型方程,引入光纤带来的传输时延被消除,对定位结果无影响;但由于其观测噪声均方根误差变大,导致了垂直方向的精度比水平方向的精度低1~2倍,这是下一步需要改进的地方。(2)使用高速光开关完成GNSS信号之间的切换,在切换时接收到的GNSS信号几乎不会丢失;但是由于GNSS信号切换以后,需要重新求解整周模糊度,且稳定时间小于1 min,在实际应用中剔除这段时间数据即可不影响定位精度。
猜你喜欢
导航定位学报(2022年4期)2022-08-16
军民两用技术与产品(2022年7期)2022-08-06
导航定位学报(2022年1期)2022-02-17
导航定位学报(2021年5期)2021-10-13
中国空间科学技术(2021年1期)2021-03-16
数字海洋与水下攻防(2020年5期)2021-01-04
中国电气工程学报(2019年18期)2019-10-21
舰船电子对抗(2019年6期)2019-04-27
电子制作(2019年24期)2019-02-23
电机与控制学报(2018年9期)2018-05-14
