基于微波光子I/Q去斜接收的宽带线性调频雷达成像系统
2019-06-13 07:13:18叶星炜张方正潘时龙
雷达学报 2019年2期
杨 悦 叶星炜 张方正 潘时龙
(南京航空航天大学雷达成像与微波光子技术教育部重点实验室 南京 210016)
1 引言
微波光子雷达作为一种新体制的雷达[1—5],将传统宽带雷达信号的产生[6,7]、控制与传输[8—11]等功能借助电光−光电转换转移到光域进行处理,具有大带宽、低传输损耗、抗电磁干扰等优势,能突破现有电子雷达系统在频率、带宽等方面的限制,在高精度探测、高分辨成像、目标特性识别等领域具有重要应用前景。
线性调频信号具有易于产生与处理的特点,在目前报道的微波光子雷达中得到了广泛应用[12—18]。现有的微波光子雷达方案,可以通过微波光子混频技术实现宽带线性调频信号的去斜接收,这种方式可以有效降低接收机对模数转换采样率的要求,并且能显著减少数据处理量,提高数据处理的实时性。然而,目前的微波光子雷达通常采用单通道去斜接收,只能获得实信号。由于实信号的频谱关于零频对称,因此这种方法无法区分参考点两侧的目标,会造成距离向模糊。
为了避免这种距离向的模糊,需要在雷达接收端进行I/Q接收,即同时采集回波信号的同相分量与正交分量,从而在数字信号处理时将回波信号变为复信号处理。文献[19]提出了基于I/Q电光调制器与90°光耦合器的I/Q接收机,分别在S波段与C波段对带宽100 MHz与200 MHz的线性调频信号实现了接近30 dB的镜频抑制比。文献[20]提出了基于偏分复用−双驱动马赫曾德尔调制器的零中频I/Q混频器,工作范围达到10~40 GHz。但是,以上研究仅论证了系统对窄带信号的接收与处理,未验证所提方案对GHz及以上带宽的线性调频信号的I/Q接收性能。此外,这两种方案在实现I/Q接收时所需的参考本振由射频端口输入。这使得参考射频本振的分配与传输需在电域进行,或需要增加一级光/电转换,难以充分发挥光纤低损传输、抗电磁干扰等的优势,对微波光子雷达系统的整体性能不利。
本文提出了一种基于微波光子I/Q去斜接收的雷达系统。在发射端利用微波光子倍频实现了宽带线性调频信号的产生。接收端采用偏分复用−双驱动马赫曾德尔调制器,在两个正交偏振态上分别利用回波信号调制光载射频本振,并通过对调制器偏压的调节使两偏振态上所得去斜信号具有90°相位差,实现光域的I/Q去斜接收。此雷达在具备实时高分辨探测能力的同时,能区分参考点两侧的目标,解决了现有微波光子雷达接收机采用光子混频去斜接收中受镜频干扰导致距离向模糊的问题。本文首先论证了采用I/Q去斜接收的必要性,然后介绍了所提出的微波光子雷达结构与原理,最后通过搭建带宽为8 GHz (18~26 GHz)的微波光子雷达实验系统,开展目标探测与逆合成孔径雷达成像的实验研究,证实了所提雷达系统的可行性与技术优势。
2 I/Q去斜接收的必要性
去斜接收的过程等价于1个零中频的混频。雷达发射线性调频信号时,将回波信号与参考信号混频后,经过一个低通滤波器滤除多余的高频分量后就能得到低频的去斜信号。由于去斜信号的频率远低于发射信号频率,去斜接收可以降低接收机对模数转换器采样速率的需求,从而减小数据处理量,提高雷达处理速度。

图1 去斜接收示意图Fig.1 Schematic diagram of de−chirping
现有的基于微波光子混频实现线性调频雷达回波去斜接收大多采用单通道去斜接收模式,如图1(a)所示。假设雷达的参考距离设置在t0c/2处,且存在相对于参考距离对称分布的两个目标,即Δt1=Δt2。使用图1(a)中的单通道去斜接收时,由于目标1和目标2的回波信号与参考信号混频产生的去斜信号频率的绝对值相同,当二者均以实信号的形式进行处理时,两个拍频信号会在频谱上发生混叠,从而产生模糊。如果采用图1(b)中的I/Q混频接收方式,分别得到I与Q两路相位差为90°的去斜信号,并将I路信号作为实部,Q路信号作为虚部,形成一个复信号:I+jQ,再进行傅里叶变换时,由于复信号的频谱是单边谱,目标1的回波信号去斜分量为负频率,目标2的回波信号去斜分量为正频率,这样就能将关于参考点对称的两个目标区分开来。
3 基于微波光子I/Q去斜接收的雷达系统
图2为微波光子雷达系统结构示意图。此雷达发射机由激光器、电光调制器1、光耦合器、光电探测器1、功率放大器、发射天线等组成,接收机由接收天线、低噪声放大器、微波功分器、电光调制器2、光滤波器、偏振控制器、偏振分束器以及光电探测器2和光电探测器3组成。其中,电光调制器2即为偏分复用−双驱动马赫曾德尔调制器(DPol−DMZM),可等效为由一个1:1光耦合器、两个双驱动马赫曾德尔调制器(DMZM)和一个偏振合束器组成,本文中射频信号只接入双驱动马赫曾德尔调制器的一个射频端口,另一个端口空置。此系统的工作原理如下:由激光器产生频率为fc的光载波信号,可以表示为

利用电光调制器1(推挽式马赫曾德尔调制器)对光载波进行强度调制,其驱动信号为任意波形发生器产生的中频线性调频信号,可以表示为

其中,fe表示中频线性调频信号的中心频率,k为调频斜率(假设k>0)。通过调节直流电压,将马赫曾德尔调制器偏置在最大偏置点,调制后的光信号可以表示为
其中,β0为基带信号的调制系数,小信号调制情况下,忽略3阶及其以上的边带,式(3)可以表示为
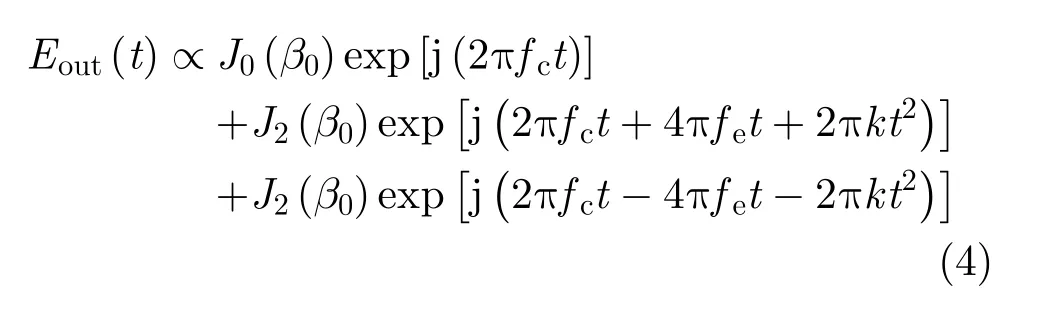
Jn(·)表示第1类n阶贝塞尔函数。经过调制后的光信号被1×2的光耦合器分为两路,一路进入光电探测器作为发射信号,记为E1(t),另一路则送入接收端的电光调制器2 (DPol−DMZM)作为参考信号,记为E2(t)。E1(t)经过光电探测器1转换后变为射频信号,再经过一个电滤波器得到输入线性调频信号的二倍频信号,此信号由2阶调制边带与载波拍频产生,可以表示为

此信号经电放大器实现功率放大后由发射天线发射至探测空间。接收天线接收到的雷达回波信号可表示为

其中,τ为回波信号延时。雷达回波信号经低噪声放大器放大后由功分器分为两路,作为电光调制器2 (DPol−DMZM)的驱动信号,对参考光信号进行调制。在X偏振态(或Y偏振态,这里以X偏振态为例),雷达回波信号接入双驱动调制器的一臂,另一臂空置,调制后得到的光信号表示为
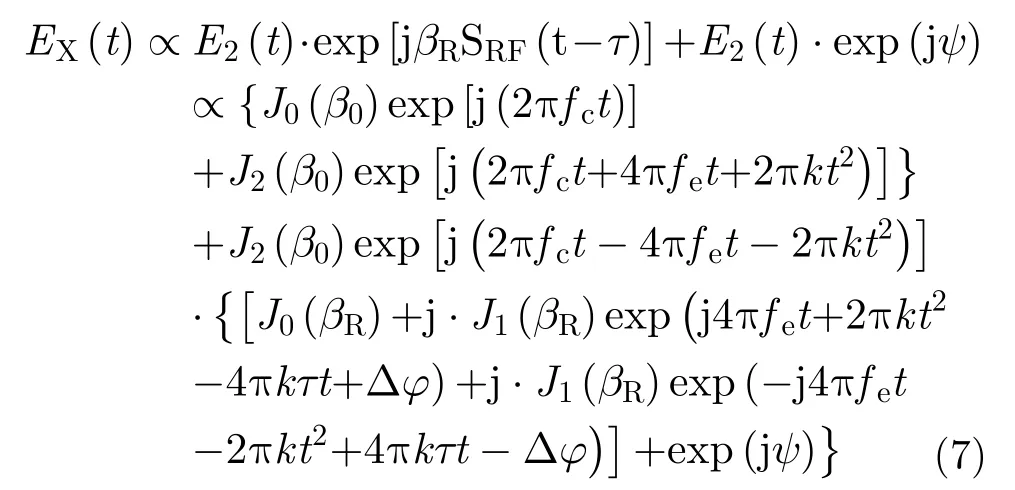
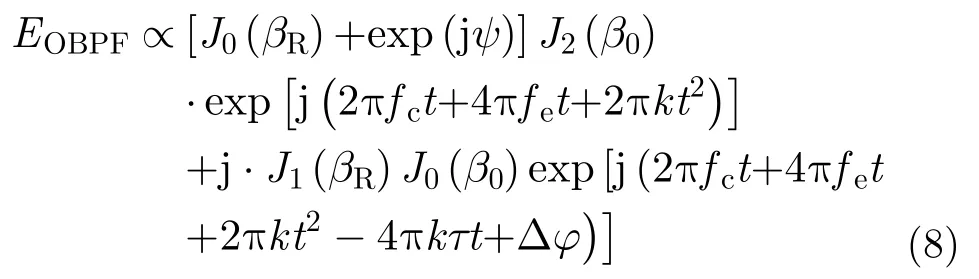
式中,E2(t)·exp[jβRSRF(t-τ)]表示雷达回波信号接入双驱动调制器的一个射频端口对其中一个支路的光载波进行相位调制之后的信号,E2(t)·exp(jψ)表示空置支路的光信号,其所包含的相位项ψ表示双驱动马赫曾德尔调制器两相位调制器之间的相位差,可以通过改变外加的直流偏置对该相位差进行调节。Δφ=2kτ2-4feτ表示与去斜所得频率无关的相位项,βR表示回波信号的调制系数,与调制器的半波电压有关。在Y偏振态上,回波信号驱动调制器的方式与X偏振态相同。电光调制器2输出的光信号经过光滤波器后,滤出参考光信号中的正2阶边带以及雷达回波信号调制光载波得到的正1阶边带,得到在X偏振态(或Y偏振态)上的光信号为
通过模数转换后将两信号在数字域中进行叠加,得到对应的复数基带信号小信号调制下,可以近似取

这样就实现了光域的I/Q去斜接收。式(11)中,解调后的复数基带信号的频率为2kτ,包含了目标的位置信息。通过对复信号进行傅里叶变换即可得到回波的延时,进而计算出目标与雷达之间的距离。
4 实验及结果分析
为验证所提方案的可行性,本文搭建了带宽为8 GHz (18~26 GHz)的微波光子雷达实验系统。此系统利用窄线宽激光器(KeysightN7714)产生波长为1550.1 nm,功率为14.7 dBm的光载波信号,并经过单臂马赫曾德尔调制器(富士通FTM7938)进行调制。此调制器由任意波形发生器(泰克70001A)产生频率为9~13 GHz,带宽4 GHz,周期为20 μs,占空比50%的中频线性调频信号驱动,并偏置于最大传输点。调制器的输出经过一个90:10耦合器后分为两路:10%的光信号经掺铒光纤放大器放大后送入接收端的偏分复用−双驱动马赫曾德尔调制器中(富士通FTM7980)作为参考信号。90%的光信号进入光电探测器1 (Finisar XPDV 2120,截止频率50 GHz)后经低噪声放大器(工作带宽17~31 GHz)放大兼滤波后由天线输出带宽为8 GHz (18~26 GHz)的线性调频信号。
为了研究产生信号的质量,利用实时示波器(Keysight DSOX93304,采样率80 GSa/s)对其进行采样与分析。图3为使用短时傅里叶变换对发射信号进行时频分析的结果,可以看到发射信号的频率为18~26 GHz,带宽8 GHz,实现了约30 dB的杂散抑制比。发射信号带内杂散的产生原因是任意波形发生器自身的9.75 GHz单频时钟信号及其倍频分量也经过电光调制器调制到光载波上,该信号对应的各阶边带与包含任意波形发生器产生的中频信号的边带共同进入光电探测器互相拍频。同时,未被抑制的正负1阶光调制边带也与单音时钟信号及其倍频分量在光电探测器中拍频。二者共同产生了如图3中所示的带内杂散。
雷达接收天线收集到的回波信号经低噪声放大器(工作带宽17~31 GHz)放大后驱动偏分复用−双驱动马赫曾德尔调制器,对参考光信号进行调制。输出光信号经过光滤波器(Finisar Waveshaper 16000A)滤出所需信号分量(即参考光信号中的正2阶边带与雷达回波信号调制光载波得到的正1阶边带)后,得到的信号光谱如图4中虚线所示。图4中也同时给出了电光调制器1与电光调制器2输出信号的光谱。
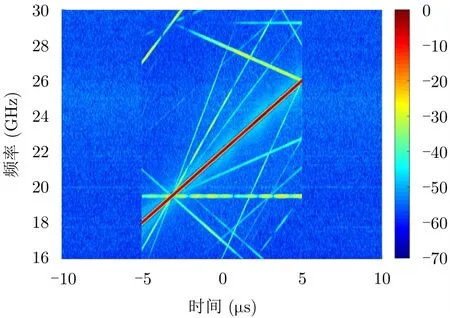
图3 发射信号时频关系图Fig.3 Spectrogram of transmitted signal
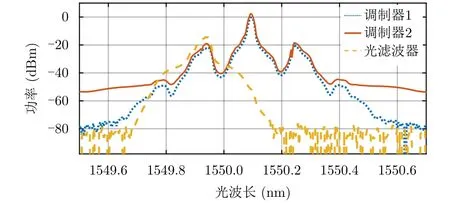
图4 雷达系统光谱图Fig.4 Optical spectra of radar system
光电探测器2和3 (康冠KG−PT−10,带宽10 GHz)的输出信号即为去斜信号的I与Q分量。此两路信号分别接入实时示波器的两个输入端口进行采样,采样率均为25 MSa/s。当探测距离雷达约1.5 m的两个角反射体目标(尺寸:4 cm×4 cm×4 cm),并且两个角反射体中心在距离向间隔3.5 cm与2.8 cm时,得到的I与Q路信号波形分别如图5(a)与图5(c)所示。对得到的复信号(I+jQ)与单路信号(Q)做快速傅里叶变换,得到如图5(b)与图5(d)所示的频谱。可以发现,图5(b)与图5(d)中采用复信号时得到的频谱为单边谱,而只采用单路信号得到的频谱是关于零频率对称的。此结果说明使用I/Q去斜接收实现了对镜频分量的有效抑制,对应图5(b)与图5(d)中结果的镜频抑制比分别达到16.7 dB和13.4 dB。在双目标探测实验中,图5(b)与图5(d)中的复信号单边频谱的两个峰值分量分别对应两个角反射体,其间距分别为0.146 MHz与0.125 MHz,通过计算得到两目标的间距分别为2.73 cm与2.34 cm。此处计算得到的间距与两角反射体中心的距离向间距存在一定误差,主要是由于实验中采用的角反射体并非理想的点目标导致。
为了进一步说明I/Q去斜接收能够抑制镜频干扰导致的模糊问题,本文进行了逆合成孔径雷达转台成像实验,如图6(a)所示。实验中对放有一个棍状反射体以及一个角反射体的转台进行成像,转台的半径为14.5 cm,转速为360°/s,以转台的中心作为参考点。成像的相干时间设置为0.056 s,对应转角为20°,由此计算出方位向分辨率为2 cm。图6(b)、图6(c)和图6(d)分别为采用复信号(I+jQ), Q路信号与I路信号进行成像的结果。通过图6(c)和图6(d)的结果可以发现,在只采用Q路或I路信息进行成像时,棍状反射体与角反射体的像发生了混叠,无法区分。而在使用I/Q去斜接收得到的复信号进行成像时,成功区分了位于参考点两侧的棍状目标及角反射体。
5 讨论
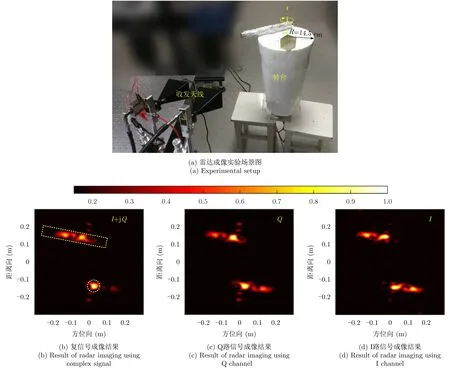
图6 雷达成像实验场景与成像结果Fig.6 Experimental setup and the results of radar imaging
本文所提微波光子雷达的主要优势在于:通过I/Q接收,对产生距离向模糊的镜频分量进行抑制,从而区分出参考点两侧的目标。为了实现I/Q接收,必须在I, Q两支路间引入一个90°的相移,并且保证两支路的幅度相等。系统中的90°相移是通过调节不同偏振态上调制器的偏置电压得到的。I, Q两支路存在的幅度、相位(延时)误差会导致镜频抑制比下降,即I/Q去斜后得到的复信号频谱存在目标的镜像分量,引起探测模糊。为了消除I/Q支路不平衡带来的影响,可以分别在模拟域和数字域进行补偿。首先在模拟域对较大的延时和幅度误差进行补偿。通过在偏振分束器和光电探测器之间增加可调光延时线,补偿两路之间的延时误差;同时增加可调光衰减器,补偿I路与Q路之间的幅度误差。然后在数字域对较小的相位和幅度误差进行补偿,补偿的规则依据文献[21]中的方法,以I路信号为基准,对Q路信号进行线性变换以补偿其幅度和相位,使得变换后的I路与Q路信号幅度相等,相位相差90°,即可实现镜频抑制比的最大化。
此外,当发射天线与接收天线之间没有很好地隔离时,会有信号直接从发射天线进入接收天线中。本文实验中采用的天线是标准增益喇叭天线,实测得到的接收天线相对于发射天线抑制比约为66 dB。由于发射天线与接收天线的距离远小于探测目标与雷达间的距离,因此直达波在去斜接收之后不会对探测目标造成干扰。尽管如此,当直达波功率较大时,仍可能导致接收机功率饱和,从而降低雷达探测的动态范围,实际应用中应该尽量提高接收天线对直达波的抑制比。
6 结论
本文提出一种基于微波光子I/Q去斜接收的雷达系统。此系统在发射端利用微波光子二倍频方法产生宽带线性调频信号,在接收端利用偏分复用−双驱动马赫曾德尔调制器两个偏振态上的并行调制及偏压控制,实现雷达回波信号的I/Q去斜接收。通过搭建带宽8 GHz (18~26 GHz)的微波光子雷达实验系统并开展目标探测与逆合成孔径成像的实验研究,证明了所提方案能有效解决现有微波光子雷达单路去斜接收中镜频干扰引起距离向模糊的问题,可显著提高微波光子雷达对目标的识别能力。该雷达可应用于周界安防、自动驾驶以及太空碎片探测等诸多场景。将该雷达应用于周界安防领域时,可以对无人机等小目标进行远距离全天候高分辨探测,有效保护重要设施的安全。在自动驾驶领域,该雷达可以全天候高分辨地感知周围路况信息,提高自动驾驶系统的安全性。将其运用于太空碎片探测时,为了提高实时性,会将参考点设置在目标区域附近,此时该雷达可以将位于参考点两侧的太空碎片分辨开来,保障航天器的安全运行。
猜你喜欢
能源工程(2021年5期)2021-11-20 05:50:42
电子制作(2019年15期)2019-08-27 01:12:08
电子制作(2019年12期)2019-07-16 08:45:20
测控技术(2018年6期)2018-11-25 09:50:24
山西大同大学学报(自然科学版)(2016年2期)2016-12-12 03:19:15
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年9期)2016-01-18 03:46:04
空间控制技术与应用(2015年4期)2015-06-05 12:22:40
海军航空大学学报(2015年4期)2015-02-27 13:45:51
声学技术(2014年1期)2014-06-21 06:56:26