基于SLAM技术的智能避障无人机
2019-06-11 13:38朱灿杰曹鑫扬付豪
科技风 2019年13期
朱灿杰 曹鑫 扬付豪
摘要:本系统采用STM32F427VIT6作为主飞行控制芯片,外部器件包括:陀螺仪,加速度计作为飞行姿态测量传感器。利用超声波跟气压计获取高度信息。使用高精度扫描激光雷达进行定位,并实现智能避障功能,采用WiFi芯片ESP8285实现无人机与遥控器之间的数据交换。该方案飞行的控制更加稳定,提高了操作的容错率。
关键词:无人机;通信链路;激光雷达
近些年来,slam技术的研究越来越火热并应用于许多场景,比如移动机器人以及无人驾驶,利用slam技术,我们能够得到未知情况下的环境信息,从而利用ARM处理器对机械的移动姿态进行修整。我们这个系统可分为slam技术应用跟无人机(载体)两大部分,从而实现无人机在未知环境下自动躲避障碍物的功能。
1SLAM技术
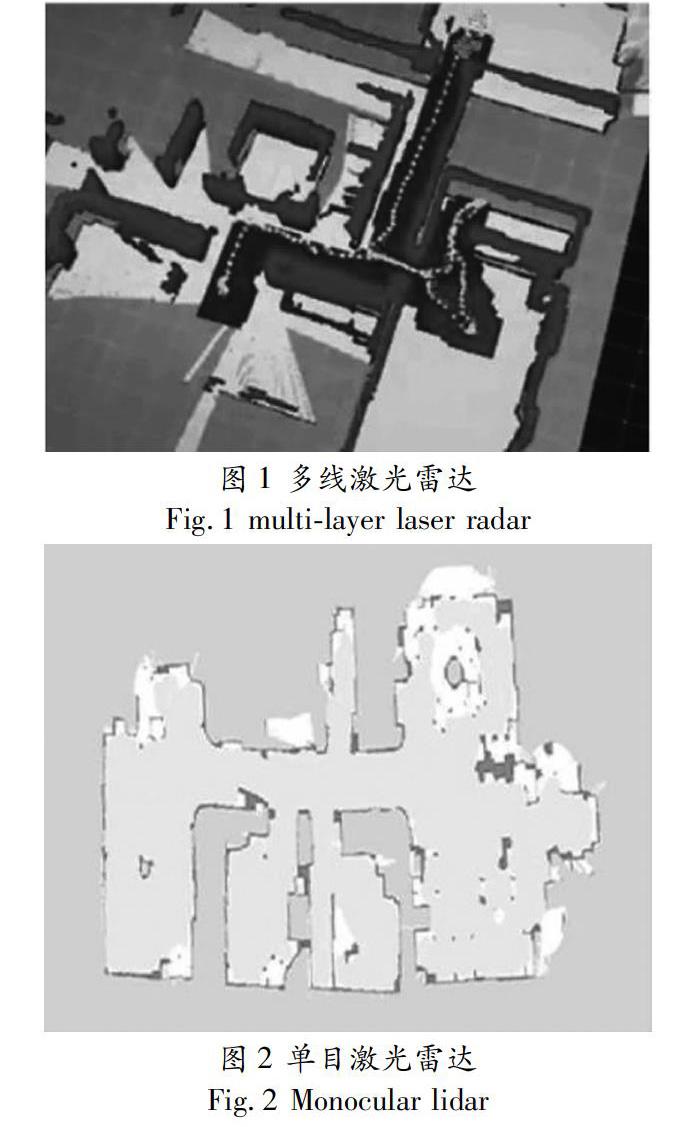
SLAM的英文名全程是SimultaneousLocalizationandMapping,中文称作同时定位以及地图创建。常规SLAM技术的应用场景是:一个机器人在未知的环境中运动,通过对环境的观测确定自身的运动轨迹,同时构建出环境的地图。早期的SLAM技术大多利用声呐、单线激光雷达等传感器来实现。从2000年以后,随着计算机视觉学习的发展,利用摄像头的视觉SLAM开始成为研究热点,并且在许多领域中体现出巨大的应用价值。
slam技术的传感器主要分为两部分,激光雷达跟摄像头。激光雷达又分单线跟多线,摄像头类可以分为单目,双目摄像头。单线跟多线的区别主要在,单线激光雷达跟单目摄像头用于二维建模,他们所得到图像是二维平面,而多线以及双目摄像头则能够绘制出立体图形。
2无人机系统
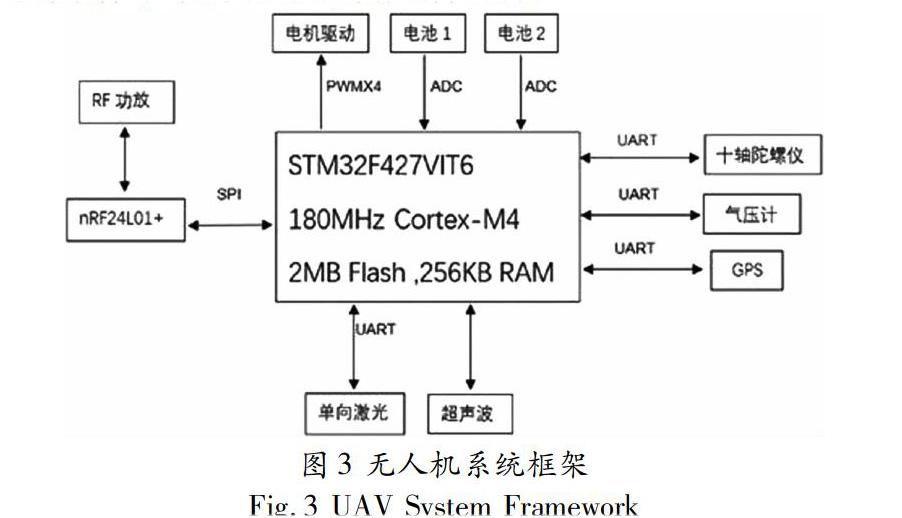
无人机系统以steamf4xxx为控制核心,外设包括单目激光雷达,十轴陀螺仪,BMP280气压计,HC-SR04超声波模块,ESP8285WiFi模块。4通道的输出PWM波,對应的为M1,M2,M3,M4四个无刷电机的控制信号。六个ADC通道分别检测6S锂电池组的实时电压。十轴陀螺仪负责采集水平跟竖直的加速度,角速度,通过串口传输,传递给飞控芯片。超声波模块用于无人机起飞跟降落时相对地面高度的判断,辅助起飞跟降落,有利于避障功能的实现。
遥控端采用一样的steam32芯片,包括蜂鸣器,摇杆,按键,LED液晶屏,ESP8285WiFi芯片。两个ADC通道分别检测两个摇杆的电位数据。另一个ADC用于检测遥控电池电量,LED屏幕上面显示电池电量,无人机剩余电量,目前环境,高度,速度,结合蜂鸣器实现提醒,躲避障碍物。
3结语
现在无人机已经渗透到我们生活中的方方面面,但是一旦我们人为操作失误,将有可能造成不可弥补的损失,所以如何利用无人机在位置环境里面躲避障碍物成为我们研究的重点,我们这个课题利用激光雷达采集环境信息,利用slam技术进行二维建模,绘制出地形的二维空间模型,用steam32作为控制芯片,从而实现自动避障功能。
致谢
非常感谢大学生创新创业计划项目的大力支持和指导老师刘鲁涛的悉心指导。在贵项目的大力支持下,在校大学生们能够实践自己的奇思妙想。将书本上的知识运用于实践中。大学生创新创业计划不仅弘扬了大学的创新实践精神,还使得同学们在实践过程中还提升了自己的精神品质,在实践中成长,体现了国家对于大学生的深切关怀和殷殷期望。非常感谢我们的指导老师刘鲁涛老师,在我们遇到困难的时候给了我们很多帮助,进行了积极指导。此致敬礼!
参考文献:
[1]杨才广,姚志兴,谭永镇,凌子嵌,凌永国,黄设新.基于STM32的无人机飞行控制系统[J].电子世界,2019.01.074.130.
[2]罗伟,吴森堂.无人机嵌入式飞行控制系统软件设计方法[J].计算机测量与控制,2011,19(12):3169-3171.
[3]匿名.SLAM的前世今生.[EBOL].https:blog.csdn.netkang1292655979articledetails52799439?tdsourcetag=s_pcqq_aiomsg.
猜你喜欢
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
中国电子报(2020年3期)2020-03-26
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26
创业邦(2016年4期)2016-04-15
新媒体研究(2014年14期)2014-08-22