
基于D-H的柔性焊接机械手运动学分析与仿真
2019-06-11 05:27朱红娟
现代职业教育·中职中专 2019年3期
朱红娟
[摘 要] 柔性机械手运动学方程的建立是对其进行运动学分析的基础。应用D-H法建立机械手的运动学模型,通过机械手各构件关节变量求解出机械手末端执行器的空间位姿。在 Solidworks中完成焊接机械手的三维建模,利用ADAMS软件对机械手进行运动学仿真。结果表明,柔性机械手弹性变形对机械手的运动精度有较大影响,研究结果为柔性机械手运动学分析提供了基础。
[关 键 词] 机械手;运动学;ADAMS
[中图分类号] TP241.3 [文献标志码] A [文章编号] 2096-0603(2019)08-0232-02
在工业生产中,机器人被广泛应用于点焊、喷涂、搬运等生产环节。在以前的机械设计中,机器人系统运动学模型均设为刚性体。机械手柔性对其关键点的位移、速度、加速度等有一定影响,且杆件越长,柔性变形的影响越不可忽视。随着机器人技术的进步和生产高速、高效的发展,构件的弹性变形越来越受到重视,因此对柔性机械手的研究成为机器人领域研究的热点。以五自由度焊接机械手为模型,基于D-H理论对其运动学进行建模分析,利用Adams软件对柔性机械手进行运动学仿真研究,为进一步进行柔性机械手的动力学分析及运动规划提供了基础。
一、运动学分析
柔性机械手多采用浮动坐标系进行表示。并将坐标建立在关节处。
(一)机械手矢量表示
机械手的柔性引起的变形包括横向弯曲变形、纵向变形和扭转变形,下文仅考虑横向弯曲变形的影响。建立坐标系时将基座定位在机械手构件底端,设定为O0—X0Y0,每个杆件末端依次设定坐标系,i杆上的坐标为Oi—XiYi,末端位置为O5—X5Y5。θ1为腰部回转自由度,θ2为大臂俯仰自由度,θ3为小臂俯仰自由度,θ4为腕关节俯仰自由度,θ5为腕关节摆动自由度;l0为腰部高度,l1为大臂长度,l2为小臂长度,l3+l4为腕关节中心到焊枪末端的距离。五自由度机械手构件上任一点矢量,如图1所示。
u fi=?准i1(x1)qi1(t)+?准i2(x2)qi2(t)
式中:?准ij(xi)=sin(jπxi/li)——振型函數
(二)机械手运动学建模
在传统的刚性机械臂运动学分析中,以关节变量作为自变量求解机械臂末端执行器的位置和姿态,通常采用D-H法。对柔性机械臂而言,我们需要对D-H法作适当的扩展和延伸。
相邻构件坐标系之间的齐次变换矩阵分别为:
E=A1A2A3A4A5=nx ox ax pxny oy ay pynz oz az pz0 0 0 1
式中:px,py,pz分别为机器人末端执行器中心相对于基坐标系x,y,z方向的位移;第1,2,3列分别为机器人末端执行器中心相对于基坐标系x,y,z的方向余弦,并且有:
nx=c1c234c5-s1s5;ny=s1c234c5+c1s5;nz=s234c5;
式中:ci,si——cosθi和sinθi的简写符号。
式中:θi——电机驱动转动的理想角度;
F(t)——构件末端的纵向受力。
二、焊接机器人运动仿真
(一)运动学仿真模型的建立
ADMAS软件本身具有一定的三维建模能力,但建模功能相对于专业的CAD软件比较薄弱。故利用SolidWorks建立五自由度焊接机器人的三维模型,通过Solidworks将装配图另存为parasolid格式文件后导入ADAMS软件。在ADAMS环境下,赋予材料属性。根据机器人模型的实际运动情况,定义各个部件之间的运动约束。在进行相应设置后,为各个转动关节施加相应驱动,然后直接在Adams/View中建立柔性体的MNF文件。
三、机器人仿真分析
利用Adams进行刚体模型和柔性模型的动态响应求解,再利用两者之差求误差曲线。在Postprocessor中,对刚体模型和柔性模型中的相关数据进行比较。
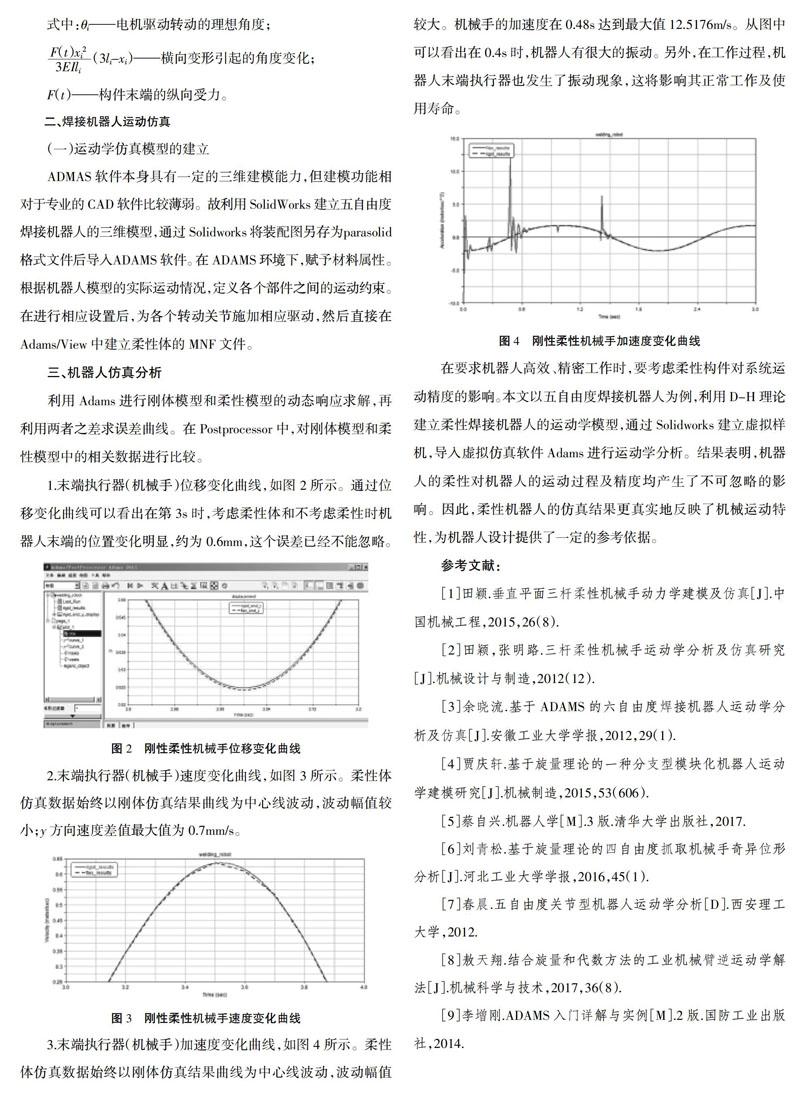
1.末端执行器(机械手)位移变化曲线,如图2所示。通过位移变化曲线可以看出在第3s时,考虑柔性体和不考虑柔性时机器人末端的位置变化明显,约为0.6mm,这个误差已经不能忽略。
2.末端执行器(机械手)速度变化曲线,如图3所示。柔性体仿真数据始终以刚体仿真结果曲线为中心线波动,波动幅值较小;y方向速度差值最大值为0.7mm/s。
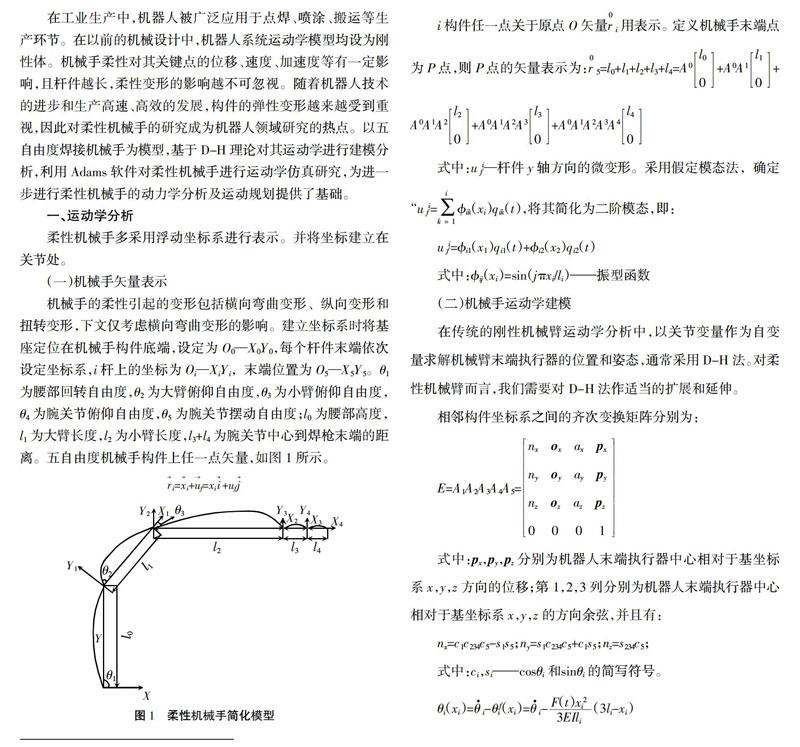
3.末端执行器(机械手)加速度变化曲线,如图4所示。柔性体仿真数据始终以刚体仿真结果曲线为中心线波动,波动幅值较大。机械手的加速度在0.48s达到最大值12.5176m/s。从图中可以看出在0.4s时,机器人有很大的振动。另外,在工作过程,机器人末端执行器也发生了振动现象,这将影响其正常工作及使用寿命。
在要求机器人高效、精密工作时,要考虑柔性构件对系统运动精度的影响。本文以五自由度焊接机器人为例,利用D-H理论建立柔性焊接机器人的运动学模型,通过Solidworks建立虚拟样机,导入虚拟仿真软件Adams进行运动学分析。结果表明,机器人的柔性对机器人的运动过程及精度均产生了不可忽略的影响。因此,柔性机器人的仿真结果更真实地反映了机械运动特性,为机器人设计提供了一定的参考依据。
参考文献:
[1]田颖.垂直平面三杆柔性机械手动力学建模及仿真[J].中国机械工程,2015,26(8).
[2]田颖,张明路.三杆柔性机械手运动学分析及仿真研究[J].机械设计与制造,2012(12).
[3]余晓流.基于ADAMS的六自由度焊接机器人运动学分析及仿真[J].安徽工业大学学报,2012,29(1).
[4]贾庆轩.基于旋量理论的一种分支型模块化机器人运动学建模研究[J].机械制造,2015,53(606).
[5]蔡自兴.机器人学[M].3版.清华大学出版社,2017.
[6]刘青松.基于旋量理论的四自由度抓取机械手奇异位形分析[J].河北工业大学学报,2016,45(1).
[7]春晨.五自由度关节型机器人运动学分析[D].西安理工大学,2012.
[8]敖天翔.结合旋量和代数方法的工业机械臂逆运动学解法[J].机械科学与技术,2017,36(8).
[9]李增刚.ADAMS入门详解与实例[M].2版.国防工业出版社,2014.
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
机电工程技术(2021年3期)2021-09-10
科技风(2021年10期)2021-04-18
科学导报·科学工程与电力(2019年44期)2019-09-10
环球时报(2019-07-18)2019-07-18
现代职业教育·中职中专(2018年7期)2018-05-14
新高考·高一物理(2016年11期)2017-07-07
新高考·高一物理(2016年1期)2016-03-05
科技与创新(2014年9期)2014-08-02
中小企业管理与科技·下旬刊(2009年8期)2009-12-31
