
垂直欠驱动TORA系统的仿真实验
2019-06-11 09:13:28赵海滨颜世玉陆志国于清文
实验室研究与探索 2019年5期
赵海滨,颜世玉,陆志国,刘 冲,于清文
(东北大学 机械工程与自动化学院,沈阳 110819)
0 引 言
具有旋转激励的平移振荡器(Translation Oscillators with Rotating Actuator,TORA)由一个未驱动的小车和驱动的小球组成[1],来源于双自旋航天器的简化模型。TORA系统是一种典型的欠驱动机械系统,在控制理论的研究中可以作为一个基准系统,用于对不同算法进行验证[2]。最初的TORA系统中,小球是在水平面内转动[3-4],目前很多学者研究了小球在垂直平面内的转动问题[5-7]。TORA系统的控制方法主要有PD控制方法[8]、反馈控制方法、反步控制方法、基于能量的控制方法[8]和滑模控制方法[9]等。
本文首先对垂直欠驱动TORA系统的动力学方程进行分析,然后建立仿真模型,并采用PD控制器进行控制。在PD控制器中,需要检测小球的角度和角速度。由于获取小球的角速度一般比较困难或者非常昂贵,因此设计了高通滤波器,通过对小球的角度进行高通滤波获取伪角速度。在PD控制器中采用伪角速度代替角速度。最后,通过Matlab/Simulink软件对欠驱动TORA系统建立了仿真实验系统,并进行了数值仿真验证。学生可以修改参数,然后进行动态仿真。通过仿真实验,向学生完整的展示了欠驱动系统的控制过程,能够加深学生对欠驱动系统的理论、仿真和控制等的理解,增强学生的编程能力和学习兴趣,有助于理论和实验教学的结合。
1 垂直欠驱动TORA系统
垂直欠驱动TORA系统由驱动的小球和未驱动的移动小车组成,如图1所示。小车通过弹簧和固定的墙面连接,小车和弹簧在水平面内做一维运动。小球在电机的驱动下在垂直平面内做旋转运动。通过小球的转动和小车位移之间的耦合作用,实现旋转小球对小车的控制。小车的质量为M,位移为x,受到水平面上的摩擦力为f。小球的质量为m,转动半径为r,输入转矩为τ,关于其质心的转动惯量为J,逆时针转离竖直向下方向的角度为θ。弹簧的弹性系数为k,重力加速度为g。
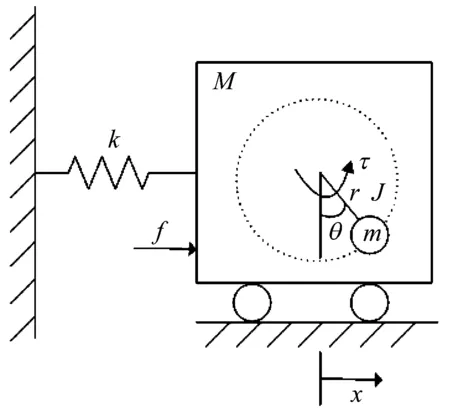
图1 垂直欠驱动TORA系统
TORA系统的总动能包括小车的动能和小球的动能,总动能为

(1)
TORA系统的总势能包括小球的重力势能和弹簧的弹性势能,总势能为
P=-mgrcosθ+kx2/2
(2)
TORA系统的拉格朗日算子函数为
L=K-P
(3)
根据拉格朗日方程[10],系统的动力学方程为
(4)
最后得到的TORA系统动力学模型为
(5)
TORA系统中有两个状态变量,分别是小车的位移x和小球的角度θ,但只有一个控制输入τ,因此TORA系统是欠驱动机械系统。
2 控制系统
对于欠驱动TORA系统,最常用的控制器为PD控制器。PD控制器和基于能量的控制方法是一致的。采用小球的角度和角速度的PD控制器为
(6)
式中:参数kp>0;kd>0。
在式(6)中,需要检测小球的角度和角速度,对于小球角度的检测比较容易,但是检测角速度一般比较困难或比较昂贵。下面通过设计动态高通滤波器,通过对小球的角度进行高通滤波获取伪角速度。动态滤波器设计为

(7)

(8)
τ=-(kpθ+kdη)
(9)
3 仿真实验
Matlab/Simulink软件在系统仿真和自动控制等领域的研究与教学中应用非常的广泛[11-14]。为了对算法进行验证,本文采用Matlab/Simulink软件建立了仿真实验系统,如图2所示。在图2中,主要采用了Simulink软件中用户自定义函数库中的Matlab Function模块和积分模块[15]等。Matlab Function模块可以采用Matlab语言非常方便灵活的建立复杂系统,非常适合进行动态系统的建模[16]。
TORA系统的参数[5-6]为:小车的质量M=1.260 8 kg,小球的质量m=96 g,半径r=0.592 m,转动惯量J=0.217 5 g·m2,弹簧的弹性系数k=186.3 N/m,重力加速度为g=9.81 m/s2。本文不考虑小车受到水平面的摩擦力,因此f=0。
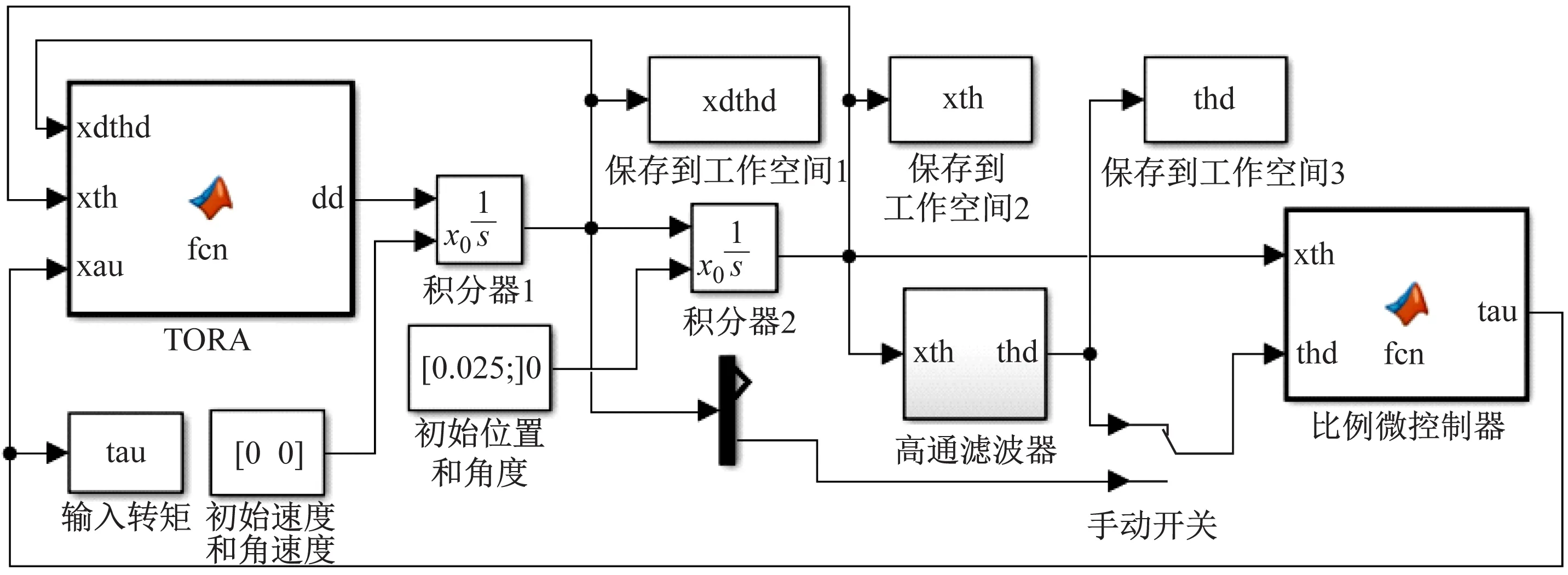
图2 TORA系统的PD控制实验
在图2中,仿真系统采用变步长的ode45算法,最大步长为1 ms,仿真时间为20 s。通过Constant模块设置初始值。通过Manual Switch模块进行小球角速度的选择。通过To Workspace模块将运行结果保存在工作空间中。
根据TORA系统的动力学方程建立仿真模型。在图2中,TORA模块内的代码为
function dd = fcn(xdthd,xth,tau)
M=1.3608;m=0.096;k=186.3;r=0.0592;
J=0.0002175;g=9.81;
x=xth(1);th=xth(2);thd=xdthd(2);
d11=M+m;d12=m*r*cos(th);
d21=d12;d22=m*r^2+J;
D=[d11,d12;d21,d22];
C=[0,-m*r*thd*sin(th);0,0];
g1=k*x;g2=m*g*r*sin(th);
G=[g1;g2];
dd=D([0;tau] - C*xdthd - G);
在图2中,PD模块内的代码为
function tau = fcn(xth,thd)
th=xth(2);
kp=0.012;kd=0.002;
tau=-(kp*th + kd*thd);
根据式(8),建立子系统模块High-pass filter,如图3所示。图中,高通滤波器的参数设置为a=65。
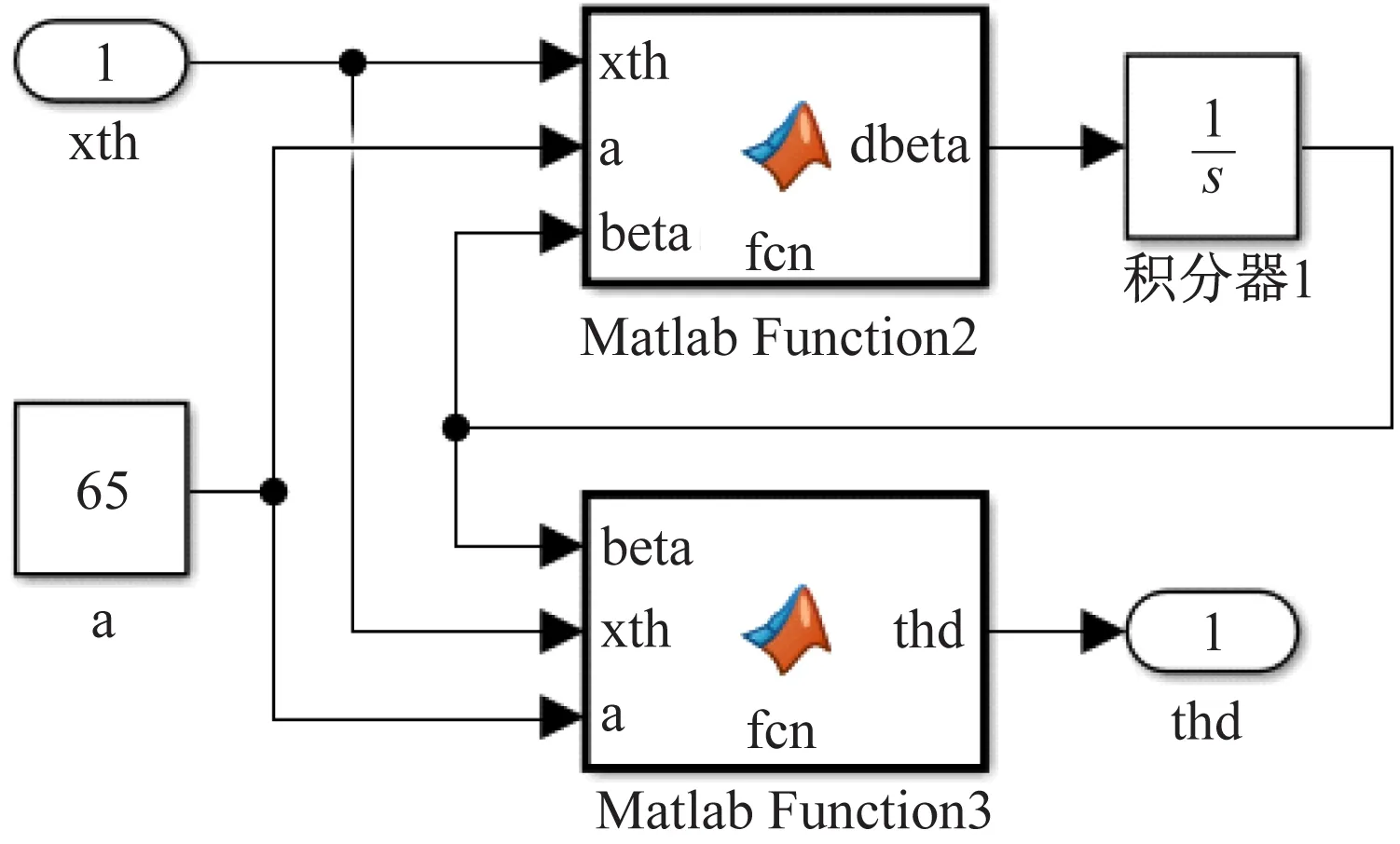
图3 高通滤波子系统
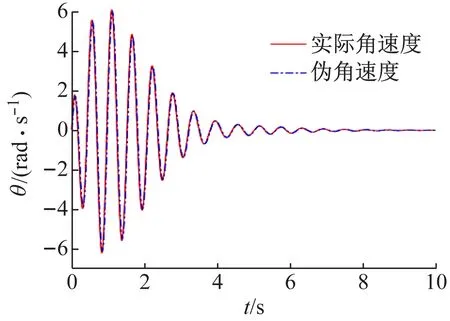
图4 小球的角速度
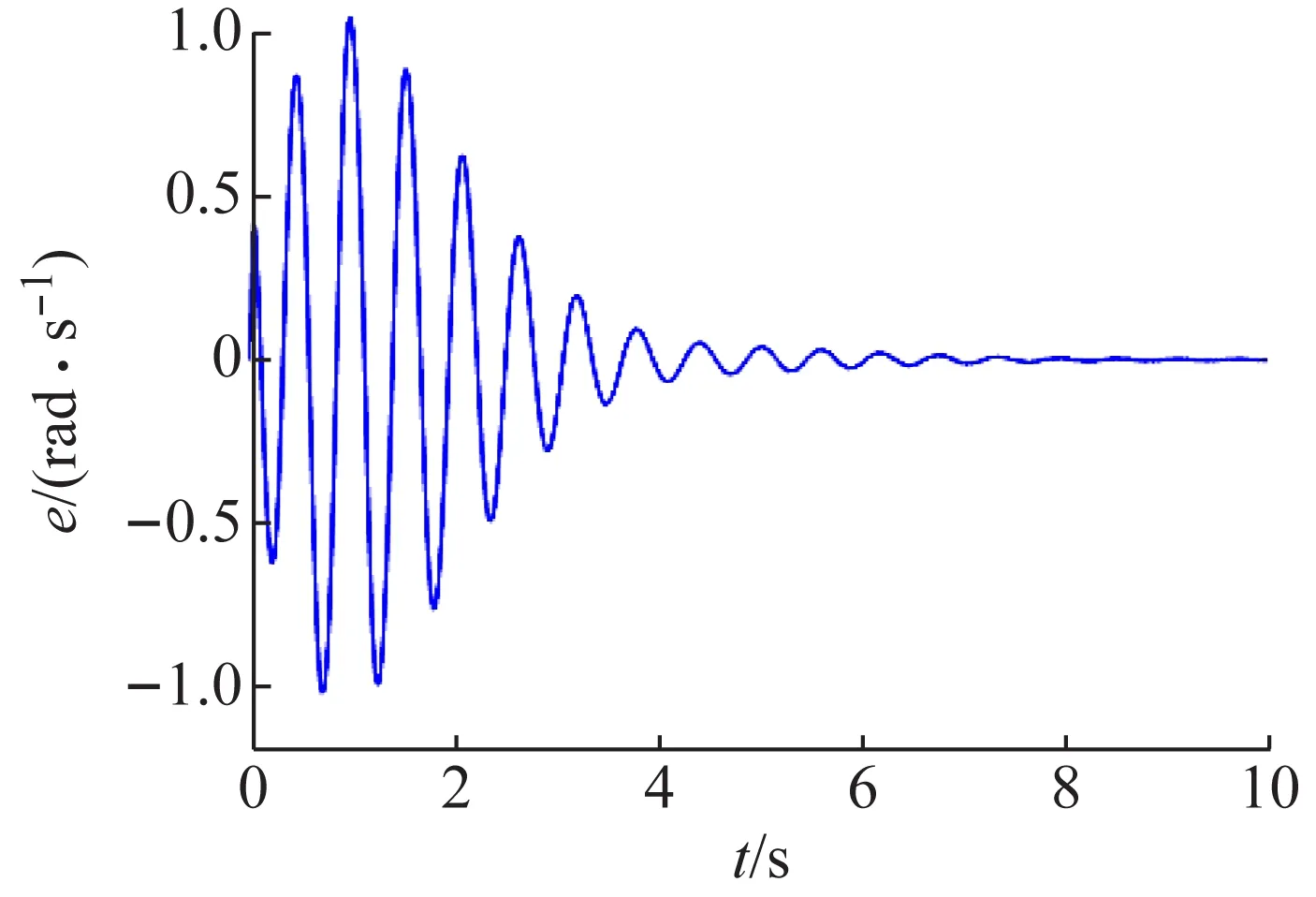
图5 角速度之间的差值
小车的初始位置为x=25 mm,在PD控制器下,小车的位移如图6所示。小车的位移逐渐减小,最终趋近于0。
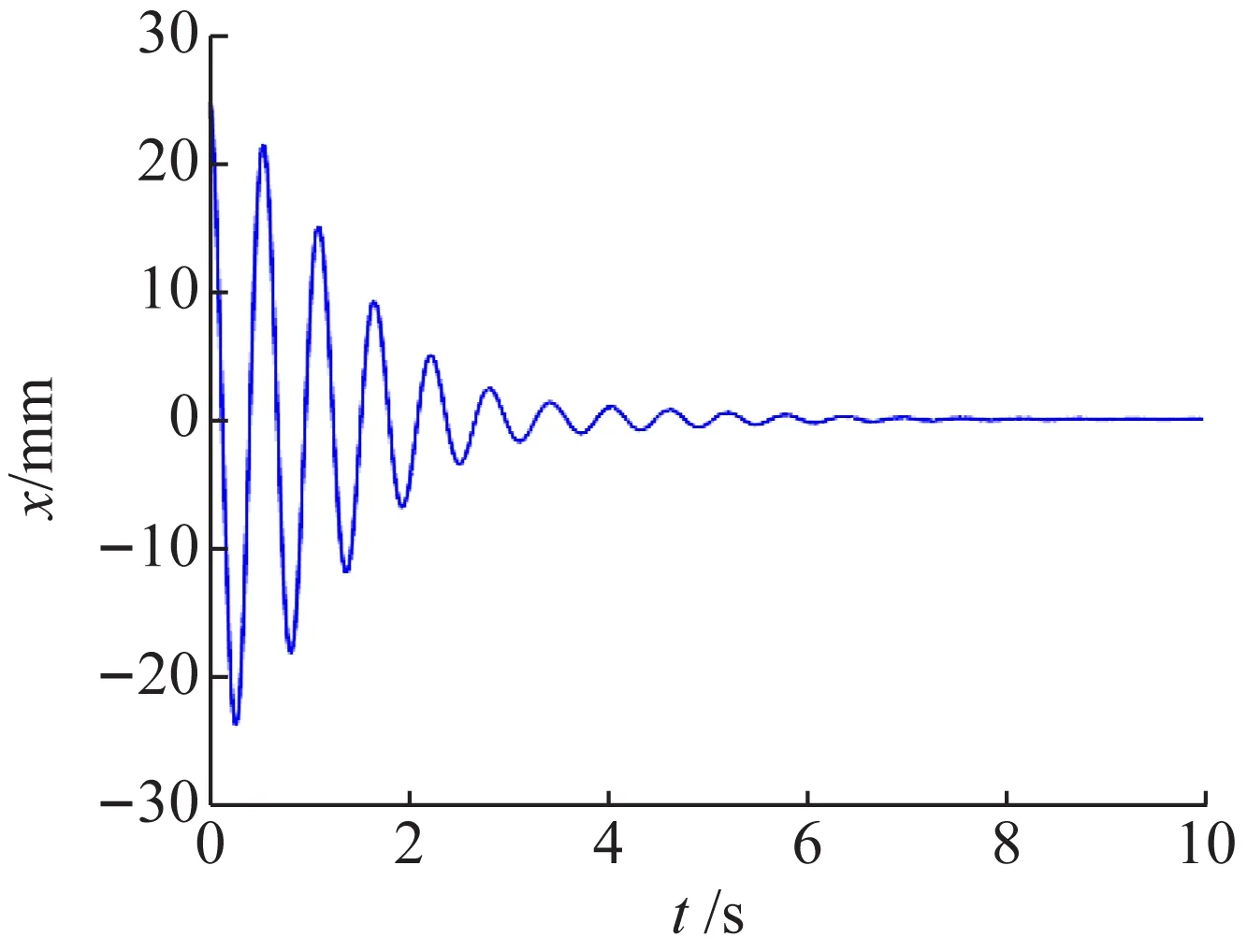
图6 小车的位移
在动力学方程和PD控制器中,小球的角度采用弧度制。将小球的角度转换为(°)后,如图7所示。小球的角度初始值为0。小球角度的最大值为30.30°,最小值为-31.47°,最终逐渐趋近于0。
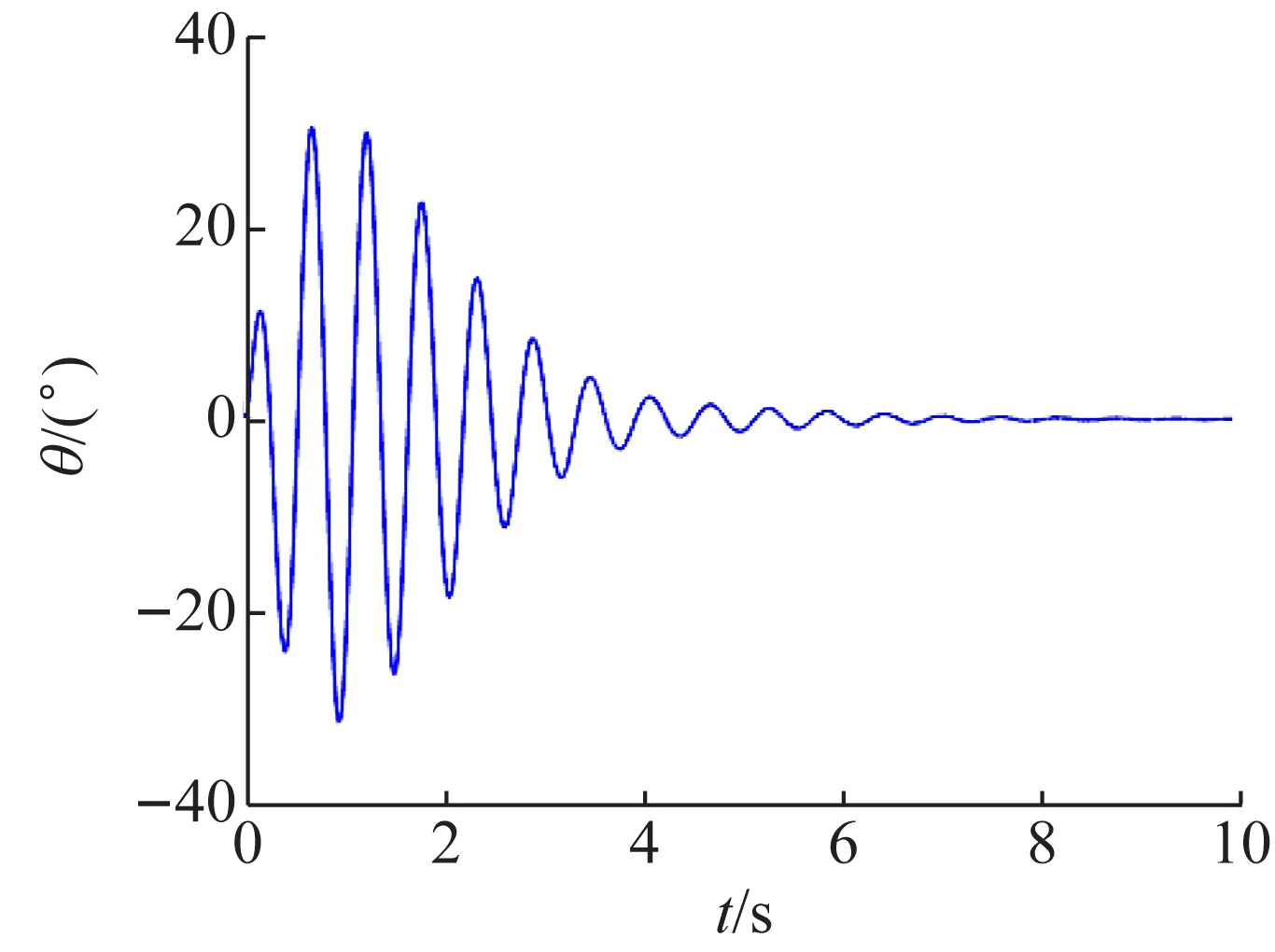
图7 小球的角度
小球的驱动力矩如图8所示。在图8中,驱动力矩的初始值为0,最大值为14.9 mN·m,最小值为-14.4 mN·m。驱动力矩逐渐减小,并趋近于0。
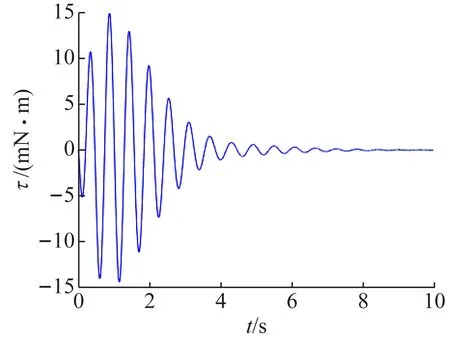
图8 驱动力矩
4 结 语
根据垂直欠驱动TORA系统的动力学方程,建立仿真模型,并采用PD控制器进行控制。通过Matlab/Simulink软件建立了仿真和控制实验系统。设计了高通滤波器,对小球的角度进行高通滤波后得到伪角速度。在PD控制器中,采用伪角速度代替实际的角速度。实验结果表明,能够进行TORA系统的平衡控制。通过仿真实验,学生可以对TORA系统的仿真和控制系统有一个完整的了解,还可以自己修改系统的参数或编写控制算法。该仿真实验能够加深学生对欠驱动系统的理论、仿真和控制等的理解,增强学生的实际编程能力和学习兴趣,培养学生的创新意识和能力。
猜你喜欢
声学与电子工程(2021年2期)2021-07-26 05:54:04
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
动漫界·幼教365(中班)(2020年8期)2020-06-29 07:28:25
家教世界·创新阅读(2020年4期)2020-06-03 04:38:56
家教世界(2020年10期)2020-06-01 11:49:26
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
电子制作(2017年1期)2017-05-17 03:54:07
电测与仪表(2016年15期)2016-04-12 00:30:54
火控雷达技术(2016年1期)2016-02-06 02:18:01
燕山大学学报(2015年4期)2015-12-25 02:19:55
