
基于激光测距法的智能虹膜识别系统设计
2019-06-11 09:13:24孟令军
实验室研究与探索 2019年5期
张 敏,孟令军
(中北大学 电子测试技术国防科技重点实验室,太原 030051)
0 引 言
虹膜相比其他生物特征识别具有更高的唯一性、准确性[1]。当前,有3种最为常见的虹膜识别算法,即基于二维Gabor滤波器的虹膜纹理相位编码算法[2],用高斯型滤波器在不同分辨率下分解虹膜图像的算法[3]以及基于小波变换的虹膜识别算法[4]。尽管这3种算法构建的虹膜识别系统有着较高的识别率,但是具有计算量大、程序复杂度高、实时性差等缺点。
为解决摄像头在可见光与红外光转换引起的虚焦、画面模糊的现象[5],本文采用激光三角测距法实现自动对焦[6],同时结合DSP强大的数据处理能力[7],设计了一种改进的虹膜特征编码方法,构建了基于激光三角法的虹膜识别系统。该系统运算量小、处理速度快、准确度高、功耗低,并且布线方便,已成功应用于某安防系统。
1 系统总体设计
系统主要由激光自动对焦、虹膜图像采集、处理与显示部分、数据存储部分、人机交互部分、WiFi网络部分以及云端服务器组成。系统结构如图1所示。

图1 虹膜识别系统总体设计结构图
系统的工作流程为:DSP控制红外激光束投射至人眼虹膜,同时光点的像被摄像头吸收呈现光斑,通过在不同离焦情况下采用激光三角法准确测出光斑的中心位置,调节对焦轴进行对焦,实现虹膜图像的精确检测,将对焦后采集到的虹膜图像编码后,传输至DSP中进行处理,并将处理得到的结果通过WiFi传输至云端。由于传输的是每个人相对应的识别码,云端服务器接收到该识别码后,调用云端数据库,即可生成详细的虹膜识别记录表。同时,虹膜识别终端将采集到的图像显示并进行语音提示。
2 虹膜识别算法与移植
虹膜识别算法主要包括虹膜图像的预处理、虹膜特征的提取和编码、虹膜特征的匹配3个方面[8]。
2.1 虹膜图像采集预处理
虹膜识别的准确性对图像采集技术提出较高的要求,采集到的虹膜图像预处理工作主要包含虹膜图像内圆与外圆的准确定位、虹膜图像的归一化以及采用设计的算法对虹膜图像进行增强显示。
对采集到的虹膜图像进行直方图统计,根据直方图特性找到合适的阈值对瞳孔进行分割识别,并利用Canny算子对瞳孔的边缘进行识别提取,然后用最小二乘法来拟合出所得虹膜图像的内圆;对所得虹膜图像的外圆进行定位时,采用应用范围广的微积分算子法来实现。虹膜图像的内、外圆定位过程如图2所示,图3所示为定位的效果。
根据对虹膜图像处理后所得的虹膜内、外圆定位结果,结合虹膜图像的可被识别特征,对其进行坐标变换,将它所在的直角坐标系映射成极坐标系,系统中将图像归一化为512×64大小,并利用直方图均衡化的方法来增强图像对比度。虹膜图像归一化及增强如图4所示。
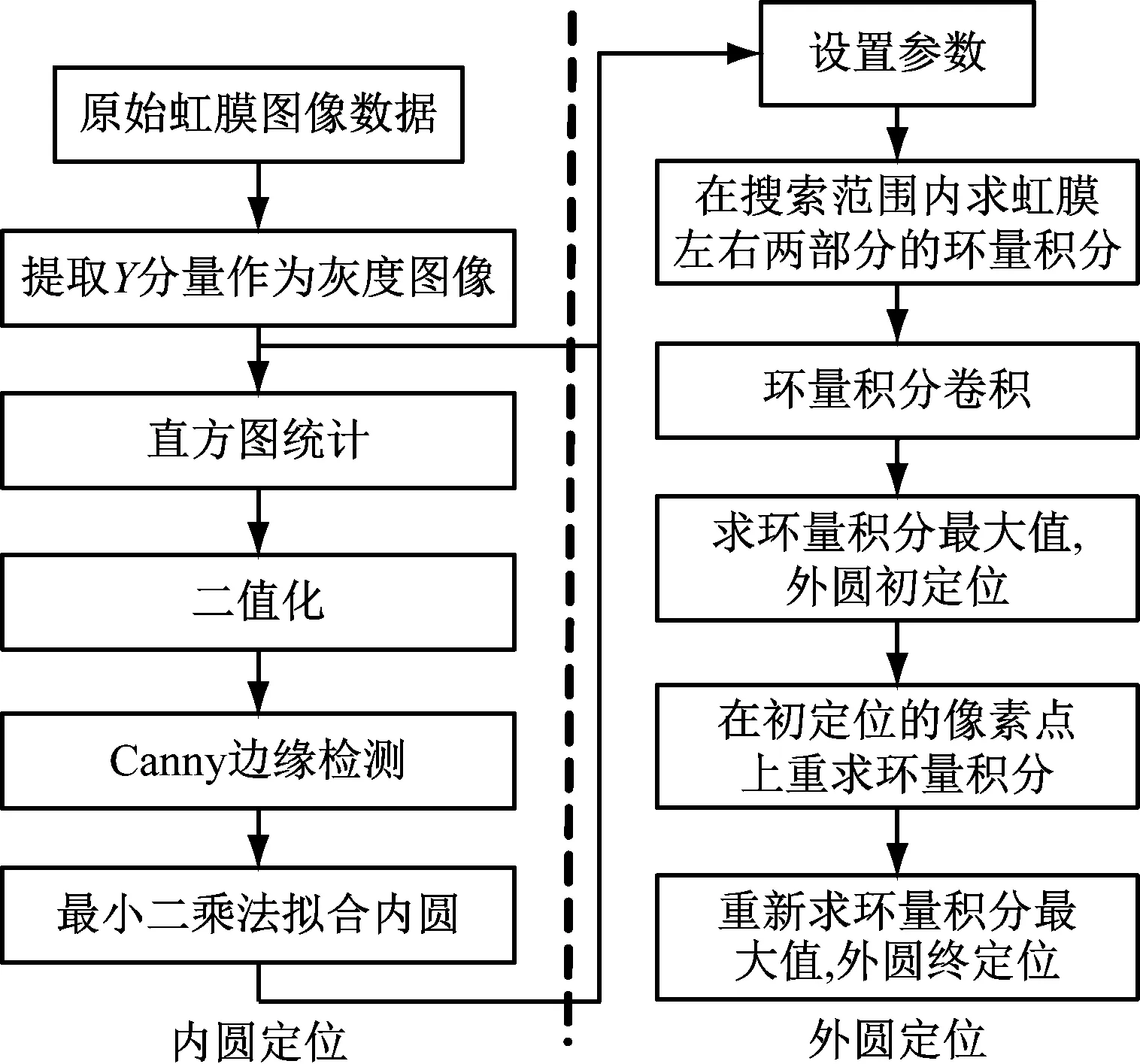
图2 虹膜内、外圆定位过程


图3 虹膜定位效果

图4 虹膜归一化及增强图像
2.2 虹膜特征提取和编码
为了避免不同尺度下的Gabor滤波器提取虹膜特征时产生的影响[9-10],设计采用24个滤波器组(4个方向、6个尺度)来对之前归一化所得的图像进行滤波,这样就能得到所采集虹膜图像的特征信息,在不同尺度上和方向上的滤波结果如图5所示。同时考虑到相位信息可以有效地反映当前纹理的相位信息,但是却不能反映其所具有的能量;而幅值均值可以有效反映纹理能量的大小,却不能表征其相位信息。因此在降低信息冗余度而又不降低虹膜信息量的前提下,提出了一种改进的虹膜编码方式。

pi/2-8虚部滤波结果pi/2-12虚部滤波结果pi/4-12虚部滤波结果Gabor实部 pi/2-8实部滤波结果pi/2-12实部滤波结果pi/4-12实部滤波结果Gabor虚部
图5 不同尺度和方向的滤波结果对比图

(1)
式中:μr为图像块Bi在滤波器下的实部均值;μi为图像块Bi在滤波器下的虚部均值。虹膜特征向量

(2)

虹膜特征向量编码流程如图6所示。

图6 虹膜特征提取过程
为了消除特征向量中两部分各自量纲的影响,需要将特征向量的前后两部分分别计算欧氏距离和海明距离,然后将其各自归一化处理,最后将两个距离相加作为最终的识别距离。
2.3 虹膜特征匹配
在提取特征向量之后,系统中采用k-近邻法(KNN)来计算两个虹膜特征向量的相似度[11]。基于k-近邻法的虹膜识别方式就是在已注册好的N个样本构成的库中找出待识别样本f的k个近邻,当且仅当待识别虹膜图像的特征向量和第k类特征向量之间的方差倒数加权欧氏距离(WED)最小时,待识别的虹膜图像即被归为第k类。WED的计算如下:
(3)

2.4 基于分块图像特征的虹膜识别算法移植
DSP系统的软件设计部分主要包含驱动任务和应用程序这两个大类[12-13]。在所设计的系统中,驱动任务主要是通过SPI协议对激光自动对焦及摄像头、SDRAM存储器、键盘控制芯片ZLG7290和语音编解码芯片TLV320AIC23的配置和初始化工作;应用程序是在BIOS系统上设计了多任务的虹膜识别系统代码。系统中设计添加了空闲任务、图像采集并显示的任务、图像预处理任务、虹膜特征编码、虹膜匹配任务,以及虹膜注册任务。将所有任务的优先级均设置为2,通过信号量的使用情况来完成不同任务之间的切换。基于DSP/BIOS系统的多任务设计如图7所示。

图7 虹膜识别系统的多任务设计
图像采集和显示任务的主要功能是启动和同步摄像头,并把图像数据搬移到图像显示缓冲区中以待显示使用;图像预处理任务是根据设计的预处理算法对虹膜图像进行预处理,从而得到归一化后的虹膜图像;虹膜特征编码任务主要是根据改进的算法完成虹膜特征提取及编码,得到可用于识别的虹膜矩;虹膜匹配任务是根据k-近邻算法实现两个虹膜的匹配计算。
此外,由于后期涉及到虹膜注册,因此需要设置一个外部硬件中断,一旦外部中断口捕获到了中断信号,系统就会立即进入该中断来触发虹膜注册任务,将采得的虹膜特征数据存放至外扩的Flash虹膜特征库中。
在DSP嵌入式虹膜识别系统设计中,考虑到系统整体设计和运行速度等因素,可把片内L2空间的前128 KB用于存放Bootloader代码和Gabor模板,以此来提高系统和程序对于常用数据的快速读取;后128 KB全部作为cache使用,这样可大大提高系统的运行速率和效率。同时把外扩的SDRAM划分为8块,用于存放临时变量、系统堆栈、虹膜图像等信息。整个系统的内存划分如表1所示。

表1 系统内存划分
3 激光自动对焦
由于激光三角法具有非接触、结构简单、测量点小、准确度高及实时在线测量快速等特点[14],设计使用激光三角法对摄像头的对焦进行优化处理。激光模块主要由入射光路和反射光路两部分组成,激光发射器位于和摄像头同侧的窗口,功率范围10~50 mW,光谱为808 nm的红外波段。激光光源能够聚焦为两部分,入射的光聚焦在样本表面,反射光聚焦在CCD传感器上呈现一个半圆光斑或者不规则的亮点,光斑的中心位置随离焦情况的不同而不同。通过计算光斑的中心位置,设计根据光斑的中心位置和离焦的相关性来驱动对焦轴上下移动实现自动对焦。
4 WiFi网络与云端服务器设计
4.1 WiFi网络设计
为了在复杂环境下方便布线,减少电缆的使用,增大网络的覆盖范围,设计采用了WiFi作为数据传输载体,从而实现数据的无线传输。
相比较ZigBee与蓝牙传输方式,WiFi无线电波覆盖范围更广,传输速率快,因其带宽可自动调整,有效保障网络的稳定性和可靠性,且对人体无害,组网成本更低[15]。设计将WiFi模块与DSP采用SPI协议实现通信,可以将DSP处理后得到的数据直接发送至WiFi模块的接收端,这样数据便可顺利准确的传输至云端。
4.2 云端服务器设计
该设计传输的只是每个人对应的识别码,设计利用ESP8266芯片,将WiFi网络通过路由器或AP设备连接至云端服务器的USB接口,当云端接收到虹膜识别码之后,上位机调用云端数据库,便可识别进行识别的个人。
5 测试结果
云端服务器上的程序接收到识别码并调用数据库,所得结果如图8所示。通过实验计时,在处理大小为320×280像素的8 bit虹膜图像时,此虹膜识别系统处理时间仅为0.8 s左右,满足实时性要求。

图8 云端服务器测试结果图
选择910张虹膜图像,分别取k值为1、2、3、4来统计识别率,所识别的准确率分别为:79.5%,85.3%,96.8%,89.7%。实验表明,当k=3时,系统识别率可以达到96.8%。即待识别的样本f与已注册的样本的方差倒数加权欧氏距离WED,取未知样本f的3个近邻,并且识别这3个近邻中的多数为哪一类,这样就能把待识别的样本归为同一类。
6 结 语
结合激光三角法测距实现自动对焦以及WiFi无线传输的优势,设计了虹膜识别系统,激光测距用来辅助相机实现更精准对焦,在光线昏暗环境或低对比度场景下对焦速度有着显著提升。在Gabor滤波图像的基础上,利用分块图像的幅值均值和相位信息来提取虹膜特征量,并结合k-近邻算法来完成虹膜识别功能,并将识别结果通过WiFi传输至云端服务器。该方法有效的解决了虹膜识别系统中结构复杂、计算量大、实时性差以及布线困难等问题。经过实际测试,系统运行稳定、响应速度快、识别率较高、布局方便,可广泛应用于安全保密、电子商务等需要进行个人身份识别的领域。
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02 09:46:54
中国典型病例大全(2022年11期)2022-05-13 17:54:50
保定学院学报(2022年2期)2022-04-07 02:26:50
现代装饰(2020年5期)2020-05-30 13:01:58
文萃报·周二版(2018年51期)2018-08-04 06:05:18
许昌学院学报(2018年4期)2018-05-02 12:27:37
中华建设(2017年1期)2017-06-07 02:56:14
丝路艺术(2017年5期)2017-04-17 03:11:50
初中生(2017年3期)2017-02-21 09:17:43
小学生优秀作文(趣味阅读)(2017年3期)2017-02-11 03:11:31
