
基于MATLAB的动态前景目标特征提取与运动跟踪
2019-06-09 10:36吴晶鑫仲梁维
软件导刊 2019年4期
关键词:目标跟踪
吴晶鑫 仲梁维


摘 要:动态前景目标识别和提取是计算机视觉领域的重要内容。对动态图像进行前景目标提取与运动跟踪,通过改进高斯混合背景模型,提出一种基于自适应特征加权的前景目标提取算法,目的是对动态画面中的图像特征进行识别并精确提取所需要的画面。根据高斯模型组合多个图像特征,针对组合特征空间的各个子空间构建似然图像,通过似然图像特征分析与加权,提取最具有差异性的特征。根据图像前景特征在图像帧与帧之间的不同,提高前景目标跟踪的鲁棒性。试验结果表明,改进算法在提取前景目标上比传统算法提高了精度,目标跟踪效果好。
关键词:MATLAB;目标跟踪;高斯混合模型;图像特征;均值漂移
DOI:10. 11907/rjdk. 182013
中图分类号:TP303文献标识码:A文章编号:1672-7800(2019)004-0016-05
0 引言
前景动态目标提取与跟踪是视觉图像处理领域的重要技术。目前,常用的运动前景检测与提取方法有光流差法[1]、背景消减法[2]、帧差法[3]、均值漂移法[4]、中值滤波等[5-6]。其中,光流法和均值漂移法广泛应用于运动目标检测中。光流法用光流场反映像素点运动的方向和速度,根据光流场分布特征提取出运动目标区域[7]。该方法检测精度高,但是无法获得运动目标的准确轮廓[8-9]。均值漂移算法运算速度快,通过在视频帧与目标帧匹配目标直方图的最大相似性区域对运动目标进行跟踪[10-11],但在前景目标颜色与背景色相差不大或存在光线变化的跟踪场景下,跟踪效果大打折扣[12]。
为提高前景模型的准确性,Heikkila & Pietikainen[13]提出了LBN(Local Binary Patterns)紋理特征,利用每个像素点周围的圆形区域计算一组适应的局部二值模式直方图,对每个像素点进行建模。Sheikh[14]等在最大后验概率-马尔科夫随机场框架下利用空间先验信息,使每个像素不再独立进行标记。
本文提出一种基于自适应特征加权的动态前景目标提取算法。根据高斯混合模型(Gaussian Mixture Model, GMM)的初始结果,利用提出的自适应特征算法对图像特征的颜色和大小进行度量,对图像进行特征加权,提取最具有差异性的特征,从而得到新的图像特征提取结果。结合均值漂移算法检测运动前景,达到对运动目标进行跟踪的目的。
1 目标前景提取
1.1 前景提取模型
一个良好的前景提取模型在目标检测、识别与跟踪等任务中起着重要作用。本研究采用高斯混合模型,针对动态目标提取前景问题,提出自适应图像特征优化方法。该方法采用图像灰度理论[15],基于高斯混合模型描述灰度直方图的正态分布,将图像信息转化为高斯模型特征。利用模型特征构建似然图像,通过计算似然比大小,初步识别图像中的背景区域或前景区域。分析图像特征区域大小信息,计算权重并将权值分配到图像特征上,以排除微小特征干扰。通过前景目标和背景对比,最终区分图像信息是背景还是前景,达到提取前景目标的目的,最终实现前景动态目标跟踪。前景提取模型如图1所示。
1.2 高斯混合模型建立
高斯混合模型是单一高斯概率密度函数的延伸,是由等式给出的M分量高斯密度的加权和,如公式(1)所示:
图像在颜色空间中,每一个像素分为R、G、B三个像素通道[16-17],分别用K个高斯分布构成的混合高斯模型表示图像中各个像素点特征。用当前图像中的每个像素点与混合高斯模型匹配,如果成功则判定该点为背景点,否则为前景点。
1.3 高斯混合模型求解
求解高斯的参数估计方法中,期望最大化算法(Expectation Maximization,简称EM算法)通常是最好的选择。EM算法根据一定分布中某些可能包含信息丢失的样本估计样本所服从的分布参数,其核心思想是根据采集到的数据递归估计似然函数[18]。定义“完全数据”的似然函数见式(2):
将高斯模型应用到动态图像并求解,结果如图2所示。图2(a)为原始图像,图2(b)为高斯混合模型下对图像特征分布求解后的结果,可以看出高斯混合模型可提取前景目标大小和形状,但存在微小图像信息干扰。
2 基于高斯混合模型的自适应特征算法
2.1 图像特征提取
在原始彩色图像中,前景区域中的像素大多具有正值,而背景主要由可能性图像中的负值像素组成,大多数像素会正确分类。本研究中,特征提取的目标是识别具有最低维度的最具差异性的图像,以降低计算复杂度并提高识别精度。此外,线性方法比非线性方法快得多[19]。
基于以上分析,本文使用PCA算法进行特征提取。PCA算法可减少数据维度,通过线性变换将原始数据变换为一组各维度线性无关的表示,据此提取数据的主要特征分量。PCA计算过程如下:
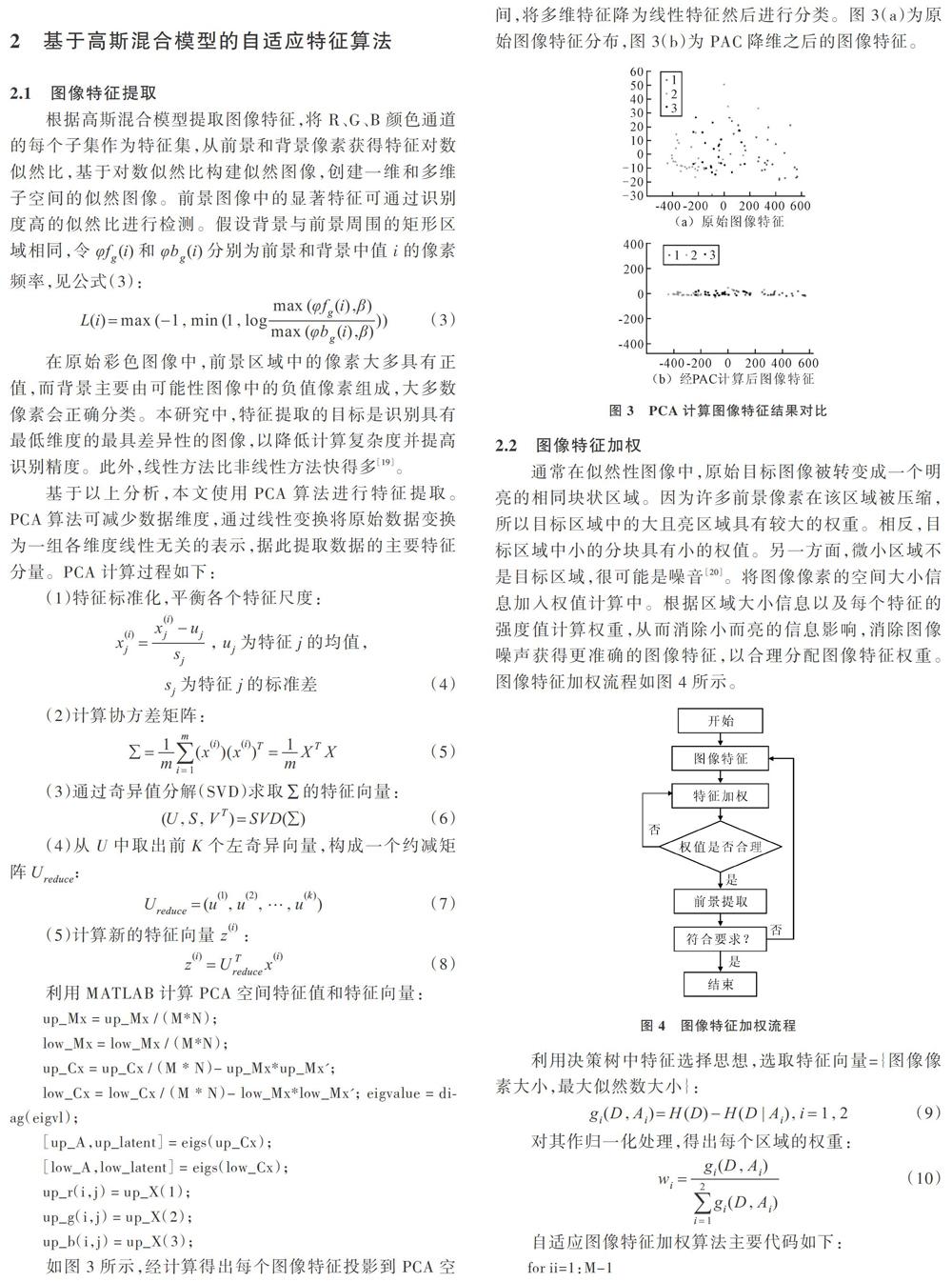
如图3所示,经计算得出每个图像特征投影到PCA空间,将多维特征降为线性特征然后进行分类。图3(a)为原始图像特征分布,图3(b)为PAC降维之后的图像特征。
2.2 图像特征加权
通常在似然性图像中,原始目标图像被转变成一个明亮的相同块状区域。因为许多前景像素在该区域被压缩,所以目标区域中的大且亮区域具有较大的权重。相反,目标区域中小的分块具有小的权值。另一方面,微小区域不是目标区域,很可能是噪音[20]。将图像像素的空间大小信息加入权值计算中。根据区域大小信息以及每个特征的强度值计算权重,从而消除小而亮的信息影响,消除图像噪声获得更准确的图像特征,以合理分配图像特征权重。图像特征加权流程如图4所示。
分配计算所有特征权重并更新图像特征区域,加权后的前景目标区域提取效果有较大提高。如图5所示,图5(a)为图像特征加权处理前,图5(b)为通过图像特征加权算法的结果。将图5(a)与图5(b)比较,可以看出图像特征经加权处理后,对图像的噪声有很好的过滤,尤其是疵点部分的特征有效地忽略了,图像前景更加明显突出,很好地提取了图像目标的前景特征。
3 前景目标跟踪
将自适应特征提取方法结合均值漂移算法应用到动态画面的动态目标跟踪中。均值漂移算法是用于定位密度函数最大值的非参数特征空间分析技术。基于先前图像中的对象色直方图,在新图像中创建置信度图,并使用均值移位找到对象原先位置附近的置信度图的峰值。置信度图是新图像上的概率密度函数,为新图像的每个像素分配概率,该概率是在先前图像的对象中出现像素颜色的概率。均值漂移算法锁定概率函数的局部加权平均值后的密度最大值,通过迭代运算找到目标位置,将目标收敛到一个稳定点,对目标进行跟踪。前景目标跟踪处理流程如图6所示。
均值漂移向量的基本形式为:
将本研究的自适应特征加权算法应用到动态图像中,将均值漂移算法和自适应特征加权进行融合,最终目标跟踪结果如图7所示。
图7(a)为在平坦的马路上拍摄的车辆动态画面,图7(b)为目标跟踪的俯视图,图7(c)为目标跟踪斜视图,图7(d)为目标跟踪的水平视图。试验结果表明,本算法在兼顾计算实时性的同时,有着较高的定位精度,精确识别了画面中的动态车辆,实现了动态目标跟踪。
4 结语
本文针对前景提取与运动目标检测,提出一种基于高斯混合模型的自适应图像特征提取前景目标方法。基于MATLAB建模软件对动态前景运动目标进行检测,并融合均值漂移算法实现了目标精确跟踪。试验证明自适应特征算法减少了背景图像与微小图像特征对前景目标的干扰,有效区分了背景区域和前景区域,提高了前景运动目标提取精度,是一种性能良好、效率高的动态前景目标提取与运动跟踪技术。
参考文献:
[1] 刘洁. 基于光流法的运动目标检测和跟踪算法研充[D]. 徐州:中国矿业大学,2015.
[2] 夏瑜. 图像处理技术研究[D]. 无锡:江南大学,2015.
[3] 严晓明. 一种基于改进帧差法的运动目标检测[J]. 莆田学院学报,2011(5):69-72.
[4] 李键,丁学明. 视频前景提取算法研究[J]. 软件导刊,2018(2):135-139.
[5] 刘国宏,郭文明. 改进的中值滤波算法[J]. 计算机光盘软件与应用,2012(6):122-123.
[6] 劉嘉敏,彭玲,袁佳成. 基于二维变分模态分解和自适应中值滤波的图像去噪方法[J]. 计算机应用研究,2017,34(5):1700-1705.
[7] 江登表,程小辉. 基于高斯运动模型的车辆检测[J]. 电视技术,2009,33(8):103-106.
[8] 张学习,杨宜民. 彩色图像工程中常见的颜色空间及其转换[J]. 计算机工程与设计,2008,29(5):1210-1212.
[9] 黄玉. 基于改进混合高斯模型的前景检测算法研究[D]. 长沙:长沙理工大学,2014.
[10] 于明,郭团团. 基于高斯混合模型的人群异常检测[J]. 软件导刊,2017(11):59-62.
[11] 李鸿. 基于混合高斯模型的运动检测及阴影消除算法研究[D]. 天津:中国民航大学,2013.
[12] 刘令芝. 基于视频的车辆检测与跟踪研究[D]. 湘潭:湘潭大学,2011.
[13] HEIKKILA M,PIETIKAINEN M,HEIKKILA J. A texture-based method for detecting moving objects[EB/OL]. http://www.docin.com/p-1395391692.html.
[14] JIAN M,JUNG C. Interactive image segmentation using adaptive constraint propagation[J]. IEEE Transactions on Image Process,2016,25 (3):1301-1311.
[15] 李培华. 序列图像中运动目标跟踪方法[M]. 北京:科学出版社,2010:32-35.
[16] 李霉,刘昌化,年福忠. 基于自适应背景的多特征融合目标跟踪[J]. 计算机应用,2013(3):891-902.
[17] 胡小锋,赵辉. Visual C++/MATLAB图像处理与识别实用案例精选[M]. 北京:人民邮电出版社,2004.
[18] GHASSABEH Y A. Asymptotic stability of equilibrium points of mean shift algorithm[J]. Machine Learning,2015,98(3):359-368.
[19] 王强光,伍铁军. 智能监控系统中的运动目标分类方法研究[J]. 工业控制计算机,2011,24(1):16-20.
[20] 黄超群. 基于混合高斯模型和Kalman滤波器的运动目标检测与跟踪[D]. 昆明:云南大学,2010.
(责任编辑:杜能钢)
猜你喜欢
科技创新与应用(2016年36期)2017-02-21
航空兵器(2016年5期)2016-12-10
哈尔滨理工大学学报(2015年5期)2016-01-19
现代电子技术(2015年18期)2015-09-16
科技与创新(2015年12期)2015-07-21
科技与创新(2015年5期)2015-04-20
农业科技与装备(2014年10期)2015-01-14
现代电子技术(2014年15期)2014-08-29
