背包式激光雷达的落叶松单木因子提取
2019-06-07 07:23黄旭贾炜玮王强郑玉洁梁玉钊
森林工程 2019年4期
关键词:胸径
黄旭 贾炜玮 王强 郑玉洁 梁玉钊


摘 要:【目的】背包式激光雷達作为一种新型激光雷达,具有其他激光雷达所没有的优点,但还没有相应的文献参考,因此本文使用背包式激光雷达进行落叶松单木因子提取,为背包式激光雷达的使用提供理论基础。【方法】以黑龙江省桦南县孟家岗林场9块落叶松人工林样地为研究对象,根据树木的形态特征,利用背包式激光雷达扫描样地获取点云数据,使用Lidar360软件对样地内的树木点云数据进行单木识别及胸径、树高的提取,同时与实测数据比较进行精度评价及相关性检验。【结果】①利用背包式激光雷达数据进行单木分割的单木匹配率较高,平均匹配率为80.20%;②单木胸径提取结果决定系数R2最低为0.8,最高可达0.97,均方根误差RMSE最高为1.92 m,最低为0.6 m,胸径提取精度最高为97.62%,最低为92.25%;③单木树高提取的平均精度为80.27%,提取结果与实测相比差距较大。【结论】背包式激光雷达扫描的点云数据可以用于样地内单木的识别;胸径的提取结果可靠性最高,能够满足林下胸径数据的采集;由于遮挡单木点云数据的树冠顶部扫描不完全,导致树高提取的精度相对较低。说明背包式激光雷达还不可以直接用于树高数据的采集和提取,需结合其他种类激光雷达数据进行更高精度的分析。
关键词:背包式激光雷达;点云数据;落叶松人工林;胸径;树高
中图分类号:S771.8 文献标识码:A 文章编号:1006-8023(2019)04-0014-08
Study on Individual Tree Factor Extraction of Larix Olgensis in Backpack Lidar
HUANG Xu1, JIA Weiwei1*, WANG Qiang2, ZHENG Yujie1, LIANG Yuzhao1
(1.College of Forestry, Northeast Forestry University, Harbin 150040;
2.College of Surveying and Mapping Engineering, Heilongjiang Institute of Technology, Harbin 150040)
Abstract:[Objective] As a new type of laser radar, Libackpack has the advantages that other laser radars do not have, but there is no corresponding literature reference. Therefore, this paper uses Libackpack to extract larch factor, which provides a theoretical basis for the use of Libackpack. [Method] Taking 9 plots of Larix Olgensis plantation sample land in Mengjiagang Forest Farm of Huanan County, Heilongjiang Province as the research object, according to the morphological characteristics of trees, the point cloud data was acquired by using the Libackpack scanning plot, and the forest individual tree detection in the sample land and extraction of the diameter at breast height (DBH) and tree height were carried out by Lidar 360 software, then compared with the measured data for accuracy evaluation and correlation test. [Result] (1) The matching rate of individual tree segmentation using Libackpack data was higher, with an average matching rate of 80.20%. (2)The determination coefficient R2 of individual tree DBH extraction results was 0.8 at the lowest and 0.97 at the highest, the root means squared error (RMSE) was 1.92 m at the highest and 0.6 m at the lowest, and the extraction precision of the diameter at breast height (DBH) was 97.62% at the highest and 92.25% at the lowest. (3) The average extraction precision of single tree height was 80.27%, and there was a great difference between the extraction results and the actual measurement. [Conclusion] The point cloud data scanned by Libackpack can be used for the individual tree detection in the sample land. The extraction result of DBH had the highest reliability, which can meet the requirements of collecting DBH data under forests. Due to sheltering, the incomplete scanning of the canopy top of individual tree point cloud data lead to the low extraction precision of the tree height relatively. It illustrated that Libackpack cannot be directly used for tree height data collection and extraction, and it was necessary to combine with other types of laser radar data for more precision analysis.
Keywords:Backpack Lidar; point cloud data; Larix Olgensis; DBH; tree height
0 引言
森林生态系统是地球上重要的生态系统。森林资源是地球上最重要的资源之一,也是生物多样性的基础[1]。森林垂直结构是陆地生态系统中重要的参数,提高遥感森林垂直结构的反演精度,对于提高森林生物量、叶面积指数估测精度和开展森林演替、碳循环、初级生产力研究具有重要意义,在森林生长、死亡和演替等森林生态系统的动态变化中起着重要作用[2]。为了及时获得准确的森林资源信息,必须进行高效的森林资源管理。获取森林资源的传统方法是通过人工每木检尺,劳动强度大、效率低,很难获得连续和广泛的森林结构参数[3]。激光雷达技术作为一种高科技应用科学,对植被空间结构和地形具有较强的检测能力,已成功应用于森林参数的定量测量和反演,特别是森林高度和垂直结构的检测,具有传统光学遥感数据无可比拟的优势[4-6]。激光雷达技术在林业中的应用越来越广泛,已成为森林调查的重要手段[7-11]。
激光雷达是一种主动遥感技术,通过发射和接收激光脉冲来精度地测定地表物体的地理位置,由于激光脉冲对森林冠层具有穿透性,因此,可以获得从森林冠层表面到林下地形之间详细的三维结构信息。国内外学者用激光雷达扫描森林,在计算机中重建树木的不规則结构和表面,并提取树干的高度、树干的直径以及构造树干分支模型中的其他参数,并且与传统的森林实测值进行比对后得出偏差满足测量精度的结论[12-15]。使用激光雷达来对树干体积、树冠体积、表面积的提取也已趋于成熟[16-19],Olschofsky等人[20]利用激光雷达来提取生物量,与已知的真实生物量数据相比,总体精度达到了95%或更高。
目前对机载激光雷达和地基激光雷达的使用和研究已经十分成熟,但在外业活动采集数据过程中成本较高,数据使用比较麻烦。而背包式激光雷达作为一种新研发出现的可便携的激光雷达还鲜有报道。因此,本文使用背包式激光雷达扫描黑龙江省东北部地区孟家岗林场9块落叶松样地,与实测样地的每木检尺进行相关性验证,为背包式激光雷达的使用提供理论基础。
1 研究地区和数据
1.1 研究区概况
研究区位于黑龙江省华南县孟家岗林场。林场位于桦南县东北部,距县城21 km。地理坐标为东经130°32′42″~130°52′36″,北纬46°20′16″~46°30′50″。林场地处完达山西麓余脉,以低山丘陵为主,坡度较为平缓,大部分坡度在10°~20°之间。现为以柞木、黑桦、山杨和白桦为主的次生落叶阔叶混交林和人工针叶林。主要乔木树种有红松(Pinuskoraien-sis) 、云杉 (Picea asperata )和樟子松(Pinussylvestrisvar. mongolica) 等,灌木和藤本植物主要有胡枝子(Lespedeza bicolor)、毛 榛 子 (Corylusmandshurica) 、五味子(Schisandra chinensis) 和刺五加(Acanthopanax senticosus) 等。草本植物主要是苔草(Carex tristachya)、铃兰(Convallaria majalisLinn)等。
1.2 人工实测数据采集
人工实测数据源于2012年7-9月在孟家岗林场设置的9块人工落叶松标准地,标准地面积0.06 hm2。对每块样地内树木逐一编号,进行每木检尺,分别测量每棵树的胸径、树高和坐标信息。样地每木调查起测胸径为 5 cm,树高采用激光测高仪进行量测,9块样地的基本情况见表1。
1.3 背包雷达式数据采集
背包式雷达数据来自于2018年7-9月对这9块样地进行复查,用背包式激光雷达扫描得到。为提取样地的激光点云数据,本文采用由北京数字绿土科技有限公司研发的LiBackpack 50 背包式激光雷达扫描系统进行扫描。背包式激光雷达系统参数见表2。
数据采集之前需要对在样地内行走的路线进行规划,如图1所示,序号表示的是行走路线顺序,目的是可以采集到树木的所有信息,同时减少数据冗余。如果样地内树木较稀疏,则采用图1(a)的路线规划;如果树木比较密集,则采用图1(b)的路线规划。采集后的数据如图2所示。
2 数据处理
2.1 点云数据的预处理
本文使用的点云数据处理软件为LIDAR360 V2.2 。在扫描获得的点云数据中,行走的路线轨迹可以清晰的显示出来,从而可以获得样地的大致位置,进而可以对点云数据进行裁剪,提高单木点云数据处理的效率。利用高度阈值方法进行去除噪音点,在此基础上利用坡度阈值方法进行地面点滤波,根据提取的地面点云数据生成数字高程模型(DEM)进而获得归一化后的点云数据,最后利用单木分割功能进行单木点云数据提取。
2.2 单木匹配
单木分割后的结果包括树ID、树木坐标、树高、胸径信息,将单木分割获得单木位置的CSV文件和人工实测数据中每棵树的XY坐标数据在ArcGIS中打开,在WGS84坐标系统下,通过显示XY数据,可以得到树木之间的相对位置关系。利用单木之间相对位置与每木胸径相对大小进行目视对比,将样地实测的树木与点云数据一一对应,实现单木匹配。
2.3 单木参数提取
单木分割后自动提取的胸径、树高并不精准,需要进一步检验修正。利用Lidar360软件以点云的形式打开单个树木的CSV文件,通过量取单木点云数据最高点的Z坐标,可以对树高进行准确的提取;同时截取胸径处(默认为1.4~2 m,本文选用1.25~1.35 m)的点云数据,采用拟合圆的方式提取胸径。除了拟合圆的方式,软件还提供拟合圆柱和拟合椭圆的方式:如果树木倾斜生长,可选择拟合圆柱的方法;如果树干表现为椭圆,则可使用点云数据的平面坐标,利用最小二乘拟合二维椭圆获得胸径信息。
2.4 精度评价
本文将从以下3个方面对背包式激光雷达提取单木结构参数能力进行评价:
(1)计算提取精度。
利用公式(1)计算单木因子的提取精度:
P=1-1n∑ni=1Xi-xiXi 。(1)
式中:P为精度;N为正确分离的单木数量;Xi为分离单木参数;xi为为与分离出的单木对应的实测单木参数。
(2)决定系数(R2)。
R2=∑ni=1(xi-x-i)(Xi-X-i)∑ni=1(xi-x-i)2∑ni=1(Xi-X-i)2。(2)
式中:R2为决定系数;n为正确分离的单木数量;Xi为分离单木参数;X-i为分离单木参数的均值;xi为与分离出的单木对应的实测单木参数;x-为与分离出的单木对应的实测单木参数的均值。
R2越大,则因变量与自变量之间的相关性越强,这是对回归直线拟合优度的检验。
(3)实际值与预测值之间的均方根误差(RMSE)。
RMSE越小,则表明预测值的效果越好。公式为:
RMSE=1n∑ni=1(xi-Xi)2 。(3)
式中:RMSE为均方根误差;n为正确分离的单木数量;Xi为分离单木参数;xi为与分离出的单木对应的实测单木参数。
3 結果与分析
3.1 单木匹配结果与分析
通过对分割后的点云数据进行分析处理,除去倾倒、枯立等异常数据,各个样地的单木识别结果见表3。表中统计了软件识别分割出的单木株数、实测的单木株数、经过分析处理后与实测数据正确匹配上的单木株数以及正确匹配率。
由表3中数据可以看出,共识别出了829棵树木,其中除去倾倒、枯立的落叶松,共识别出692棵落叶松。能正确与样地实测数据匹配上的树共659棵,平均匹配率为95.8%。1号样地和5号样地的单木正确匹配率最高,而9号样地的正确匹配率最低。通过分析实测数据和点云数据后发现,1号样地和5号样地因为密度较小,树与树之间距离较远,林下通视条件好,灌木杂草少,所以识别率高;而识别率低的9号样地林下灌木、杂草多且密,幼树较多,林下通视条件较差,小树成从状生长,会当成一棵树,导致不能正确识别出树木。此外,由于树与树之间的距离过近,同样会影响单株树木的检测圆,导致识别结果不准确。
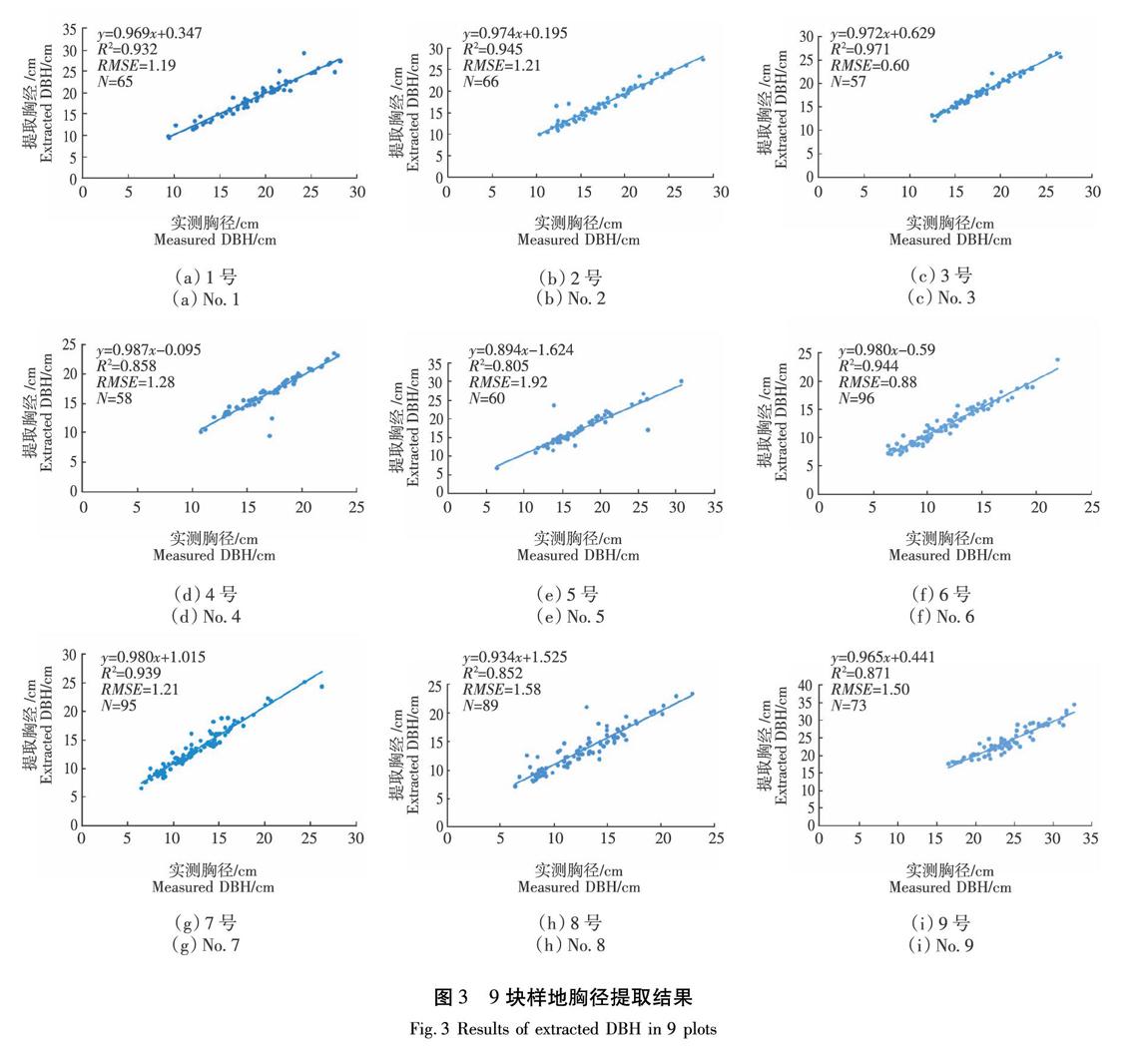
3.2 胸径提取精度结果与分析
表4与图3列出了9块样地的背包式激光雷达提取出的胸径与实测调查的胸径回归关系。可以看出提取胸径与实测胸径有着较好的线性关系。结果说明利用背包式激光雷达对单木胸径进行提取,可以获得与人工实际测得数据相关性较好且精度较高的数据。9块样地相关系数R2均在0.8以上,最低为0.8,最高可达0.97;RMSE最高为1.92,最低为0.6;胸径提取精度均在92%以上,平均精度为94.5%,最高为97.62%,最低为92.25%,说明胸径的提取结果具有一定可靠性。在点云数据中提取胸径信息的过程中发现,在胸径位置处无灌木、树枝树叶等杂物遮挡的情况下,胸径提取较为精确。因为若胸径处有杂物干扰,会对点云处理软件提取胸径的拟合圆算法造成影响,导致拟合圆过大,无法准确提取单木的胸径信息。
3.3 树高提取精度结果与分析
表5与图4列出了背包式激光雷达提取出的树高与现地调查对应的9个样地单株木的树高回归关系。从结果上来看,提取的树高与实测树高的相关性并不高。结果说明利用背包式激光雷达对单木树高进行提取的效果并不好,与实测值相关性不高。R2最高才达到0.57,只有4号样地的树高提取精度在90%以上,其余的提取精度都不高,平均提取精度只有80.27%。3号样地可能是由于采集当天下雨,对点云数据的采集有影响,造成部分树木树冠点云数据的丢失,导致了与实测数据相比差异很大,R2只有0.001。分析点云数据发现树木的树冠部分扫描并不完全,由于背包式激光雷达仪器空间采样率较低,并且树木的树冠之间、树冠内部都有树枝与树叶相互的遮挡,导致树冠顶部信息获取不完全。同一株树木的背包式激光雷达点云数据与地基激光雷达点云数据相比,背包式激光雷达提取出的点云数据树冠部分点云十分稀少,导致提取的树冠参数信息不准确。
4 讨论
本研究从使用背包式激光雷达提取的胸径和树高信息的结果来看,还存在着许多需要解决的问题。国内外激光雷达在林业上的应用还不完善,针对单木结构重建的研究,所用算法对单木之间的遮挡考虑比较少[21]。胸径的自动提取算法依赖于圆弧存在性检测算法;树高自动化提取算法精度在于如何判断点与单木的归属关系[10]。同时由于背包式激光雷达扫描不能完全获取树冠上层信息,对于密集林分单木树高的提取精度较低,还需要与机载激光雷达、地基激光雷达等结合来进行更高精度的分析。与地基激光雷达相比,使用地基激光雷达采集林业数据,须进行布设标靶、架站、扫描和移站等操作,完成整体数据采集需要花费一定的人力及时间,采集完的数据也需要进行多站拼接后才能输出最终的采集结果;与机载激光雷达相比,背包式激光雷达具有效率高、全覆盖和真三维测量等优良的技术特性,携带方便,数据采集不受天气等外界因素的影响,测量范围容易控制,有着良好的应用前景。但激光雷达数据在时空分布上不具有优势,也不能够提供反演森林生物物理参数所需的光谱信息,而被动光学遥感可以弥补这一不足。因此将背包、地基、机载激光雷达和被动光学遥感结合有利于提高森林资源的监测能力,为森林生态研究提供科学依据。
5 结论
本研究利用在孟家岗地区使用背包式激光雷达扫描的9块样地的点云数据,使用Lidar 360软件提取了每木的胸径和树高信息,得出了以下结论:
(1)背包式激光雷达扫描的点云数据可以用于样地内单木的识别。样地林下灌木、杂草和幼树较多,树与树之间距离过近,会影响正确识别出树木。
(2)胸径的提取结果与实测数据相关性较高,结果具有一定的可靠性,能够满足林下胸径数据的采集和提取。
(3)9块样地对单木树高进行提取的效果都不好。背包式激光雷达扫描出的单木点云数据树冠部分并不完全,导致了树高信息提取的不准确。所以背包式激光雷达还不可以直接用于树高数据的采集和提取,需结合其他种类激光雷达数据进行更高精度的分析。
【参 考 文 献】
[1]刘见礼.基于无人机立体影像数据的森林结构参数调查研究[D].北京:中国科学院大学(中国科学院遥感与数字地球研究所),2017.
LIU J L. Research on the inventory of forest structure parameters using UAV stereo imagery[D]. Beijing: University of Chinese Academy of Sciences (Institute of Remote Sensing and Digital Earth Chinese Academy of Sciences), 2017.
[2]李增元,刘清旺,庞勇.激光雷达森林参数反演研究进展[J].遥感学报,2016,20(5):1138-1150
LI Z Y, LIU Q W, PANG Y. Review on forest parameters inversion using LIDAR[J]. Journal of Remote Sensing, 2016, 20(5):1138-1150.
[3]倪文儉,过志峰,孙国清,等.基于地基激光雷达数据的单木结构参数提取研究[J].高技术通讯,2010,20(2):191-198.
NI W J, GUO Z F, SUN G Q, et al. Research on extraction of tree structure parameters from terrestrial laser scanner data[J]. Chinese High Technology Letters, 2010, 20(2):191-198.
[4]姜兴山,陈建新.激光雷达及其应用[J].佳木斯大学学报,2000,18(1):93-96.
JIANG X S, CHEN J X. Laser radar and its applications[J]. Journal of Jiamusi University (Natural Science Edition), 2000, 18(1):93-96.
[5]陈健.基于地基激光雷达的不同森林类型单木胸径与树高提取[D].合肥:安徽农业大学,2016.
CHEN J. Individual tree DBH and height estimation using terrestrial laser scanning (TLS) in different forest type[D]. Hefei: Anhui Agricultural University, 2016.
[6]刘鲁霞,庞勇.机载激光雷达和地基激光雷达林业应用现状[J].世界林业研究,2014,27(1):49-56.
LIU L X, PANG Y. Applications of airborne laser scanning and terrestrial laser scanning to forestry[J]. World Forestry Research, 2014, 27(1):49-56.
[7]黄华国.激光雷达技术在林业科学研究中的进展分析[J].北京林业大学学报,2013,35(4):134-143.
HUANG H G. Progress analysis of LIDAR research on forestry science studies[J]. Journal of Beijing Forestry University, 2013, 35(4):134-143.
[8]刘鲁霞.机载和地基激光雷达森林垂直结构参数提取研究[D].北京:中国林业科学研究院,2014.
LIU L X. Retrieving vertical structural parameters of forest using terrestrial and airborne laser scanning data[D]. Beijing: Chinese Academy of Forestry, 2014.
[9]肖夏阳,文剑,高林,等.探地雷达识别树木内部缺陷层位技术的研究[J].林业机械与木工设备,2017,45(4):14-18.
XIAO X Y, WEN J, GAO L, et al. Research on internal defect layer identification of trees using ground penetrating radar[J]. Forestry Machinery & Woodworking Equipment, 2017, 45(4):14-18.
[10]刘鲁霞,庞勇,李增元,等.用地基激光雷达提取单木参数结构——以白皮松为例[J].遥感学报,2014,18(2):365-377.
LIU L X, PANG Y, LI Z Y, et al. Retrieving structural parameters of individual tree through terrestrial laser scanning data[J]. Journal of Remote Sensing, 2014, 18(2):365-377.
[11]李丹,庞勇,岳彩荣.地基激光雷达在森林参数反演中的应用[J].世界林业研究,2012,25(6):34-39.
LI D, PANG Y, YUE C R. A review of TLS application in forest parameters retrieving[J]. World Forestry Research, 2012, 25(6):34-39.
[12]SIMONSE M, ASCHOFF T, SPIECKER H, et al. Automatic determination of forest inventory parameters using terrestrial laser scanning[C]. Proceedings of the Scand Laser Scientific Workshop on Airborne Laser Scanning of Forests, Ume, Sweden, 2003: 251-257.
[13]PFEIFER N, GORTE B G H, WINTERHALDER D. Automatic reconstruction of single trees from terrestrial laser scanner data[C]. Proceedings of the ISPRS Congress: Geo-Imagery Bridging Continents, Istanbul, Turkey, 2004: 114-119.
[14]WEZYK P, PIERZCHALSKI M. Terrestrial laser scanning versus traditional forest inventory first results from the polish forests[C]. ISPRS Workshop on Laser Scanning, 2007, 36(3): 424-429.
[15]鄧向瑞,冯仲科,罗旭.三维激光扫描系统在林业中的应用研究[J].北京林业大学学报,2005,27(S2):43-47.
DENG X R, FENG Z K, LUO X. Application of three-dimensional laser scanning system in forestry[J]. Journal of Beijing Forestry University, 2005, 27(S2):43-47.
[16]HIDEBRANDT R, LOST A. From points to numbers: a database-driven approach to convert terrestrial LiDAR point clouds to tree volumes[J]. European Journal of Forest Research, 2012, 131(6):1857-1867.
[17]韦雪花,王永国,郑君,等.基于三维激光扫描点云的树冠体积计算方法[J].农业机械学报,2013,44(7):235-240.
WEI X H, WANG Y G, ZHENG J, et al. Tree crown volume calculation based on 3-D laser scanning point clouds data[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(7):235-240.
[18]徐伟恒,冯仲科,苏志芳,等.一种基于三维激光点云数据的单木树冠投影面积和树冠体积自动提取算法[J].光谱学与光谱分析,2014,34(2):465-471.
XU W H, FENG Z K, SU Z F, et al. An automatic extraction algorithm for individual tree crown projection area and volume based on 3D point cloud data[J]. Spectroscopy and Spectral Analysis, 2014, 34(2):465-471.
[19]王佳,张芳菲,高赫,等.地基激光雷达提取单木冠层结构因子研究[J].农业机械学报,2018,49(2):199-206.
WANG J, ZHANG F F, GAO H, et al. Extracting crown structure parameters of individual tree by using ground-based laser scanner[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2):199-206.
[20]OLSCHOFSKY K, MUES V, KOHL M. Operational assessment of above ground tree volume and biomass by terrestrial laser scanning[J]. Computers & Electronics in Agriculture, 2016, 127(9):699-707.
[21]CHENG Z L, ZHANG X P, CHEN B Q. Simple reconstruction of tree branches from a single range image[J]. Journal of Computer Science and Technology, 2007, 22(6):846-858.
猜你喜欢
防护林科技(2021年3期)2021-09-12
广东园林(2017年2期)2017-06-27
农民致富之友(2017年4期)2017-04-10
现代农业科技(2017年4期)2017-04-10
绿色科技(2017年1期)2017-03-01
江苏农业科学(2016年7期)2016-10-20
南方农业·下旬(2014年2期)2014-09-23
湖北农业科学(2014年3期)2014-07-21