
移动激光扫描测量系统设计集成与实现
2019-06-06 08:31:00俞德崎李广云谷友艺
导航定位学报 2019年2期
俞德崎,李广云,王 力,谷友艺
(1. 信息工程大学 地理空间信息学院,郑州 450000;2. 信息工程大学 数据与目标工程学院,郑州 450000)
0 引言
地理信息技术、通信技术、感知技术和超算技术是智慧城市建设的关键技术,也是大数据采集与处理的重要技术。其中,地理信息技术是采集数据和信息的关键,如何更高效、高速、高精度地采集用于智慧城市建设所需的城市空间地理信息数据是当前需要研究解决的热点问题[1-2]。基于多传感器集成的移动激光扫描测量系统(mobile laser scanning mapping system, MLS)是当前城市空间地理信息采集的一项主要技术,是一种新兴的、综合的、高动态的测量手段[3-4]。一般典型的MLS集成了定位定姿系统(positioning and orientation system, POS)、激光扫描系统、影像采集系统,以现代传感器技术、计算机技术、模式识别技术和平差理论为支撑。POS由全球卫星导航系统(global navigation satellite system, GNSS) 和 惯 导 系 统(inertial navigation system, INS)组合而成可提供载体位姿数据,MLS利用激光扫描系统和影像采集系统采集空间点云数据和影像数据,在确定了激光扫描系统和影像采集系统 INS中心的相对位置之后,通过POS提供的载体位置和姿态数据将点云数据和影像数据转换到地理坐标系下,再利用点云与影像数据间的对应关系,将二者数据融合最终形成彩色点云,从而直观反映出城市空间物体的表面色彩、结构和尺寸等信息。
随着国内外专家学者多年来的应用实践,MLS的相关技术日趋成熟,且按照载体的不同已经发展出了车载MLS、船载MLS、机载MLS、无人机载MLS和背负式MLS。由于MLS与传统的测绘地理信息获取手段相比,具有高精度、高效率、自动化、实时性强的特点;因此MLS已经在地理数据采集和制图、街景数据采集、城市树木普查、市政管理和道路测量等领域得到广泛的应用[5-7]。目前在 MLS的成熟系统中,国外主要有 MX8系统[8]、DYNASCAN系统、VMX-250系统[9]、全新的多平台移动测绘系统 Robin;国内典型的 MLS有LD2000系统[10]、3Dsurs系统[11]、SSW 系统[12]、iScan系统[13]等。本文在借鉴国内外MLS设计与集成经验的基础上,选择合适的传感器,对系统进行整体设计,提出相应的时空基准统一方案,集成一套能够满足城市空间地理信息数据采集需求的移动激光扫描测量系统。
1 系统设计与集成
MLS是一个复杂的软硬件一体系统,不仅包括原始数据采集所需的硬件,还包括对原始数据进行后处理的软件系统。为了实现MLS的测量功能,并使MLS达到工程测量所要求的精度,必须确保MLS的各模块的软硬件之间能够协调一致地工作。MLS一般包括以下模块:主控模块、传感器模块、通讯模块和电源模块。具体组成如图1所示。

图1 系统组成
由图1可知,电源模块主要由电池和电源保护装置为传感器模块和主控模块供电;主控模块主要包括工控机、存储器和后处理软件等;传感器模块主要是POS和激光雷达;主控模块与传感器模块间的通信和数据传输依靠通讯模块进行;通讯模块包括网线、USB线和相关接口。
本文主要使用1台POS、1台激光雷达、1台从站GNSS、1台控制计算机和电源组成一套可用于多种载体平台的 MLS。POS系统使用的是NovAtel公司的 SPAN-CPT,其具有很好的性价比,一套完整的 SPAN-CPT包括主机、GNSS天线和连接线,主机集成了GNSS+INS的紧耦合组合导航定位系统;激光雷达使用了Velodyne公司的16线激光雷达,每秒可输出高达30万个目标点,支持外接 GNSS,并且具有 360°的水平扫描范围;从站GNSS是国产北斗星通GNSS,主要包括 C201型接收机和 GPS500天线。对整个系统的线路连接如图2所示。

图2 系统线路连接
1)CPT主机与主站天线通过TNC互连,将主站天线接收的卫星信号输入CPT。
2)CPT主机的COM1接口用于连接激光雷达,发送信号地、秒脉冲和时间同步信息实现时间同步操作。
3)COM2接口,用于连接从站接收机,构成双天线系统,实现辅助IMU的初始对准。
4)从站接收机与从站天线通过TNC互连,将从站天线接收的卫星信号输入接收机。
5)USB通讯接口用于CPT主机连接计算机,实时显示CPT工作状态和设置工作参数,保存位姿数据。
6)网口通讯接口用于激光雷达连接计算机,实时控制激光雷达,设置扫描参数和保存数据。
7)稳压电源为CPT、激光雷达和从站GNSS供电,推荐用12 V,避免电压过高烧坏设备,过低则设备不能正常运行。
系统的集成如图3所示:激光雷达竖直固定于MLS前部,使发射的扫描线与水平面垂直,确保能完整地采集周围环境数据;主站天线固定安装于MLS顶部;从站天线安装于载体上,与主站天线距离至少为1.5 m;POS系统和电源安装固定于MLS内部;数据传输接线口位于MLS的后部;整体系统由开光控制开启与关闭。
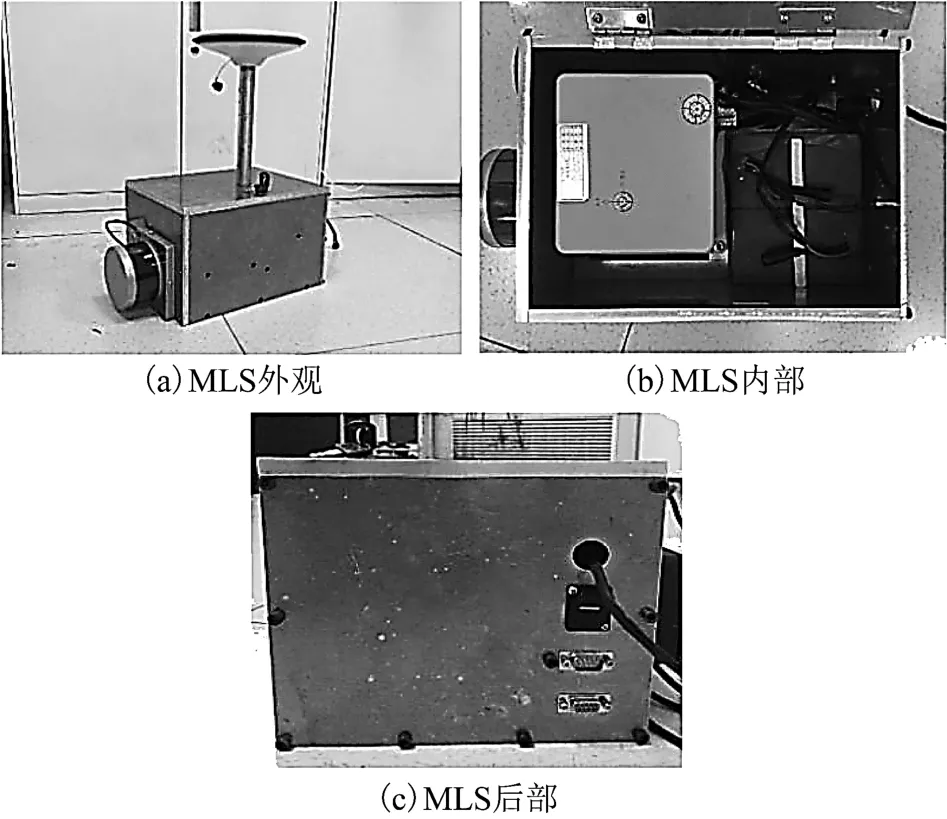
图3 MLS系统集成
2 时空基准统一方案
移动激光扫描系统的核心问题是多传感器间的数据融合。在数据融合过程中,由于不同设备采集数据定义的时间系统不同,POS使用的时间系统与激光雷达使用自身仪器时间系统不同,导致同一时刻采集的数据在不同的设备中记录的时间戳不同,无法对同一时刻采集的数据直接进行融合处理,因此必须对系统进行时间同步处理;同时,POS和激光雷达采集的数据结果坐标定义不同,无法直接使用,需要求解激光雷达坐标系中心相对于INS中心的安置参数,即偏心矢量和安置角,将二者坐标系统一到相同坐标系下。
1)时间基准统一。本文所用Velodyne激光雷达支持外接全球定位系统(global positioning system, GPS),当外接 GPS且时间同步信号锁定时,激光雷达采集的原始数据尾部将以每小时微秒的形式加上 GPS提供的当前 UTC时间戳,使激光雷达与POS数据统一到相同的时间系统;当时间同步信号失锁时,激光雷达继续使用自身的仪器时间系统。因此,本文使用基于秒脉冲触发法实现MLS的激光雷达与POS的时间基准统一。Velodyne预留的 GPS外接接口是一个 8针脚的GPS接口,接口定义如图4所示。
为了实现POS与激光雷达的时间基准统一,需要将POS输出的秒脉冲(pulse per second, PPS)信号、推荐定位信息($GPRMC)和信号地与GPS接口相应的针脚相连。如表1所示。同时,由于激光雷达只能识别接收频率为 1 Hz、波特率 9 600的$GPRMC时间同步信息,因此使用时需要事先利用串口调试助手将POS的COM1口输出的时间同步信息设置成相应的格式、频率和波特率。在时间系统统一之后,由于POS设置的数据采集频率为1 Hz,激光雷达工作频率为5~20 Hz,且激光雷达扫描点的时间戳精度为毫秒级,导致在数据融合时,无法确定激光头扫描对应时刻载体准确的位置与姿态数据,需要对POS的位置姿态数据进行插值处理,估算对应的位姿数据。

图4 GPS接口定义
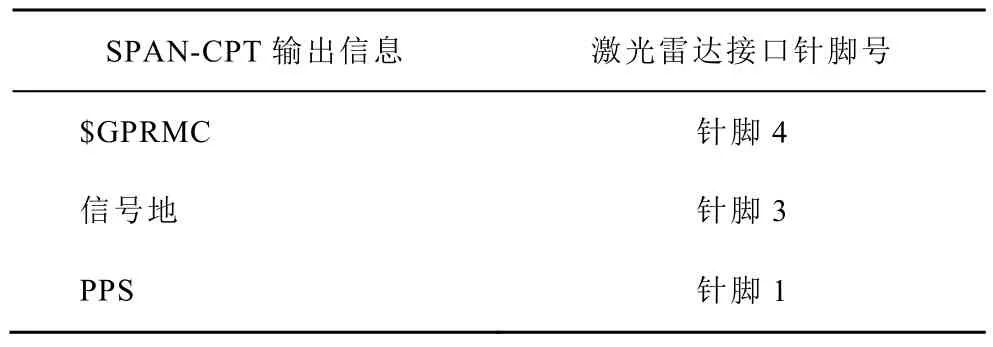
表1 针脚对应连接
2)空间基准统一。空间基准统一主要是安置参数的标定。安置参数指激光扫描仪相对于惯导坐标系的偏心矢量(lever arm)和安置角(borsight angel),其参数的标定称为 MLS的外标定(external calibration)。POS的尺寸可以得到,由设备厂家提供,MLS平台在设计加工时已经让加工厂对设备尺寸进行了准确的测量。因此MLS尺寸和POS尺寸已知,可以得到MLS角点在INS坐标系下的坐标;引入球靶标,激光雷达扫描得到球靶标中心在激光雷达坐标系下的坐标;利用全站仪测量MLS角点和球靶标中心在全站仪坐标系下的坐标,利用7参数模型分别建立全站仪坐标系与INS坐标系、激光雷达坐标系的转换关系,从而可以得到激光雷达坐标系到INS坐标系的转换关系,安置参数标定流程如图5所示。

图5 安置参数标定原理
本文使用的7参数坐标转换模型为

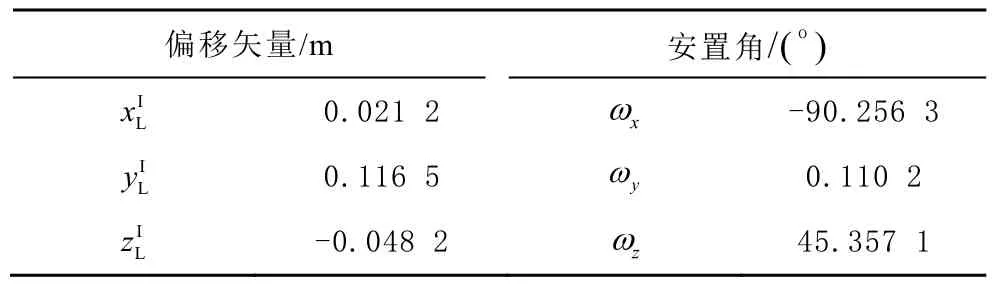
表2 安置参数标定结果
3 实验与结果分析
在完成MLS设计集成与平台加工之后,以电动三轮车为载体,在中心校区的环道进行了移动测量路测实验,验证MLS平台是否能够实现移动测量数据采集的功能。
中心校区环道路面平坦,卫星信号良好,只有少数路段出现卫星失锁情况,因此适合路测实验的展开。路测实验(如图6所示)主要包括数据采集和数据处理2个过程:
第一,数据采集过程。首先在空旷的平地建立GNSS基准,将基站数据采集模式设置为静态采集,采样间隔 1 s,量取天线高,开始静态数据采集;然后打开MLS,使POS和激光雷达通电,对POS进行初始化设置,载体绕着环道匀速行驶开始采集POS数据和激光雷达数据;最后,数据采集结束,保存POS和激光雷达数据,关闭MLS,再关闭基站 GNSS。
第二,数据处理过程。将基站 GNSS数据和POS数据导入Inertial Explorer软件进行组合导航解算,推算导航轨迹,在GNSS解算断点处,软件会自动进行平滑处理,轨迹如图6(a)所示;再将激光点云数据与组合导航解算结果进行融合处理形成点云数据,将点云数据导入PtCloudsPro软件显示处理。
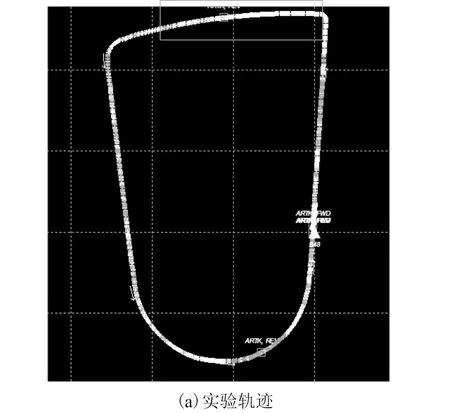

图6 MLS路测实验
图6(c)所示为MLS,载体带着MLS沿着环道校园环道行驶,其以大约15 km/h的速度在实验区域图6(b)匀速行驶。由图6(a)轨迹可知:在校园环道上全程GNSS信号较好,只有少数几个位置出现GNSS失锁导致的断点,通过平滑算法对断点处轨迹进行了修正;点云数据采集发生在轨迹上方的灰色框内的部分,该部分路段具有极好的GNSS信号,定位定姿精度较高;该路段道路开阔,两侧树木和建筑物较多;该路段采集点云全局高程图如图7所示。

图7 点云全局图
图中间的白色直道部分即为实验测量区域的道路部分,未采集到相应的点云数据;原因在于本文所用载体的高度有限,MLS放置于载体时,激光雷达高度距离地面大约为80 cm左右,小于激光雷达的最小测距范围,无法采集到路面点云数据。从全局点云中截取独栋建筑的局部点云数据,并利用人工交互对建筑点云进行去噪处理,得到几何轮廓较清晰的建筑点云数据,如图8所示。
通过局部点云图 8可以看出:路测实验所得的点云数据中比较清楚地反映了道路两侧的信息,建筑物表面轮廓分明,整体数据质量达到了预期的效果;但同时在对点云数据进行处理时也发现,部分小区域出现较散乱的点云数据,可能是由于载体在某些路段抖动过大所致;同时某些地方出现无点云数据的现象,这些空缺可能是物体反射率过低所致。

图8 点云局部
4 结束语
本文针对城市空间地理信息采集的需求,设计集成了一套移动激光扫描测量系统。基于本文设备自身的特点,提出的时空基准统一的方案能够较好解决在移动激光扫描系统数据融合过程中时间系统不一致和坐标系统不一致的关键技术问题;对移动激光扫描测量系统进行的路测实验中,采集得到的点云数据较好地反映了道路两侧的环境信息,得到了较好的结果。总体来说,本文集成的测量系统可以满足城市空间地理信息数据采集需求。
同时,该系统也存在一些需要改进之处,如设计集成方面需要降低重量以方便携带,以及后期考虑加入影像采集系统,融合出彩色点云数据。另外,点云的质量控制也是移动测量需要解决的关键问题,后期将结合本文的MLS对相关问题做进一步的研究。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
中国交通信息化(2017年10期)2017-06-06 07:13:20
中等数学(2017年2期)2017-06-01 12:21:50
电子制作(2016年1期)2016-11-07 08:42:54
学习月刊(2016年19期)2016-07-11 01:59:46
