ABB 拆垛机器人辅助吸盘装置的设计
2019-06-04 03:02:34毕玉超
烟草科技 2019年5期
毕玉超,高 勇,丛 鑫,刘 辉,高 坤
1. 山东中烟工业有限责任公司济南卷烟厂,济南市高新区科航路2006 号 250104
2. 济南朗科工贸有限公司,济南市铁骑路68 号盘龙山工业园 250132
ABB 拆垛机器人是从瑞典ABB 公司引进的先进物流设备,拆垛能力为16 件/min,具有拆垛速度快、工作稳定等特点。真空吸附式吸盘作为拆垛机器人的末端执行元件被广泛应用于物流自动化领域[1],ABB 拆垛机器人使用的真空海绵吸盘微孔直径仅为0.5 mm,遇到大颗粒灰尘容易堵塞。特别是近年来在国家烟草专卖局“降本增效、提质增量”要求下,各卷烟企业普遍对包装纸箱进行回收,二次利用的纸箱表面聚集较多灰尘颗粒,且容易出现皱褶,吸盘在吸附烟箱过程中常因吸力不足而造成烟箱掉落现象[2-3],造成烟箱损坏,影响工作效率。机器人仿真软件RobotStudio 具有动画仿真功能,可以使机器人工作站高度仿真真实工作与实际场景[4],因此利用RobotStudio 软件对机器人进行研究的报道较多。仲德平等[5]利用RobotStudio 软件编写了曲线焊缝的路径离线程序,并将程序导入机器人工作站中,通过调试与仿真解决了焊接过程中曲面工件与焊枪碰撞等问题;蒋旗等[6]利用RobotStudio 软件进行了路径规划编程,获得了成形、性能较好的构件;郝建豹等[7]利用RobotStudion 软件编写了码垛程序,实现了机器人的码垛作业。此外,欧洋等[8]分析了电机、气动、液压3 种驱动方式的特点,选择气动驱动作为机械手的驱动方式;齐良春等[9]改进了气缸结构,使维保工作更加方便可靠;蔡培良等[10]设计了一种残烟自动回收装置,通过气缸控制翻板导向器的转动,应用效果良好。但利用气缸作为辅助吸盘装置的驱动方式则鲜见报道。为此,基于ABB拆垛机器人设计了一种辅助吸盘装置,采用RobotStudio 软件编写程序并将其导入到机器人工作站中,以期减少设备故障次数,提高拆垛效率。
1 系统设计
1.1 装置结构
辅助吸盘装置主要由费斯托DSNU 圆形气缸、铝合金支撑框架、活动支架、吸盘、管路等部件组成,见图1。该装置安装在海绵吸盘(4)上方的铝合金支撑框架(2)上,与机器人末端连接;活动支架(3)和吸盘(5)位于烟箱两侧;气缸(1)安装在铝合金支撑框架(2)上,带动与活动支架(3)相连的吸盘(5)完成对烟箱的吸附和释放动作。在实际生产中,当机器人原有海绵吸盘吸附到烟箱时,辅助吸盘装置开始动作,吸附并夹紧烟箱两侧,将烟箱运送到辊道输送机上,吸盘收回,完成发烟任务。

图1 辅助吸盘装置结构图Fig.1 Structure of auxiliary sucker device
1.2 气缸选型
气缸理论推力计算公式[11]为:

式中:d 为气缸直径,m;P 为气路压强,Pa。
气缸实际推力计算公式为:
式中:η为气缸效率,当压强为0.5 MPa 时,气缸效率约为0.8[11]。
由此可得气缸实际推力为:

已知单烟箱质量为16 kg,若烟箱两侧有两组吸盘进行吸附,则每组吸盘的吸附力F1=0.5mg=0.5×16×9.8=78.4 N。取吸盘与烟箱的最小摩擦系数为0.4,则气缸实际推力应满足0.4 F实际≥F1,即0.4×0.2πd2P≥78.4 N。已知气路压强为0.5 MPa,计算可得气缸直径d≥0.024 98 m=24.98 mm。取气缸直径d=25 mm,最终选用型号DSNU-25-80-PPV-A 的费斯托圆形气缸。
1.3 吸盘部件
吸盘部件包括固定端、气缸连接端、活动支架、销轴、吸盘、上部活动摇杆和固定吸盘摇杆等,见图2。其中,活动支架采用曲柄摇杆机构,固定端(1)与铝合金支撑框架连接,气缸连接端(2)固定在活动支架(3)上,当气缸做伸出或收回动作时,带动活动支架(3)转动,活动支架(3)带动上部活动摇杆(6)和固定吸盘摇杆(7)一起转动,进而带动吸盘(5)完成相应动作。

图2 吸盘部件结构图Fig.2 Structure of sucker unit
1.4 气路结构
辅助吸盘装置采用气动方式进行驱动,气路结构见图3。来自气源(6)的压缩空气分为3 路,分别流向3 个两位五通电磁阀的进气管(1),由两位五通电磁阀控制气缸(8)拉杆伸出或收回,带动吸盘部件(9)完成对烟箱的吸附和释放动作。
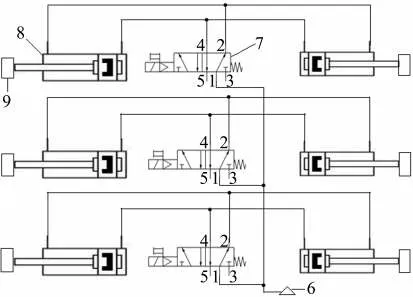
图3 辅助吸盘装置气路结构图Fig.3 Structure of air circuit of auxiliary sucker device
1.5 控制程序
RobotStudio 仿真软件能够真实地模拟机器人现场工作场景,方便用户进行机器人编程和操作[12]。本设计中采用RobotStudio 软件编写控制程序,并运用了机器人轴配置的计时指令、触发装置动作指令、数组应用、中断程序等技术,离线程序分为主模块、数据模块和系统模块,将程序导入机器人工作站,可使辅助吸盘装置随程序指令完成相应动作。控制程序流程图见图4。
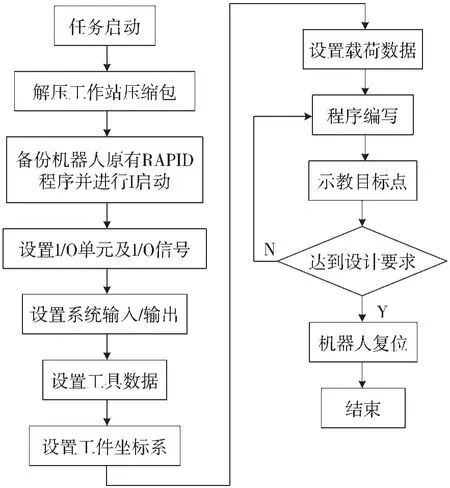
图4 RobotStudio 仿真软件编程流程图Fig.4 Flowchart of RobotStudio simulation software programming
2 应用效果
2.1 试验设计
材料:“泰山(红将军)”牌箱装件烟,包装材料为二次利用纸箱,共10 000 件(由山东中烟工业有限责任公司济南卷烟厂提供)。
设备:IRB6600 型ABB 拆垛机器人(瑞典ABB公司)。
测试方法:ABB 拆垛机器人运行速度设定为13 件/min,安装辅助吸盘装置前后分别完成5 000件烟的拆垛操作,统计掉烟次数。
2.2 数据分析
表1 可见,安装辅助吸盘装置后的ABB 拆垛机器人,在拆垛过程中未出现因吸附不稳而造成烟箱掉落等问题,每5 000 件烟中烟箱掉落次数由12 次减少为0,保障了烟箱质量。此外,出现掉烟故障后,海绵吸盘再次吸附烟箱时吸盘容易与烟箱发生碰撞造成吸盘损坏。安装辅助吸盘装置后,海绵吸盘的使用周期由2 个月延长到4 个月,减少了备件费用。

表1 安装辅助吸盘装置前后测试数据Tab.1 Test data before and after installation of auxiliary sucker device
3 结论
基于RobotStudio 机器人仿真软件、气动驱动方式、曲柄摇杆机构等技术设计了ABB 拆垛机器人辅助吸盘装置,在拆垛过程中能够辅助吸盘吸附夹紧烟箱两侧,增加了吸附烟箱的稳定性,解决了拆垛过程中烟箱掉落等问题。以济南卷烟厂生产的“泰山(红将军)”牌箱装件烟为对象进行测试,结果表明:安装辅助吸盘装置后,在拆垛过程中未出现因吸附不稳而造成烟箱掉落等问题,在机器人运行速度为13 件/min 时,每5 000 件烟中烟箱掉落次数由12 次减少为0,海绵吸盘使用周期延长2 个月,有效降低了操作人员的劳动强度以及机器人的故障发生率,保证了物流系统的平稳运行。
猜你喜欢
物流技术与应用(2022年11期)2022-12-01 08:20:22
现代制造技术与装备(2022年5期)2022-07-22 08:00:46
电脑爱好者(2022年5期)2022-05-30 14:58:47
南方农机(2021年3期)2021-02-07 09:07:04
湖北农机化(2020年17期)2020-11-02 07:46:54
航天控制(2020年5期)2020-03-29 02:10:34
科学与信息化(2020年36期)2020-01-04 19:01:41
机电元件(2018年4期)2018-08-09 12:17:38
设备管理与维修(2017年10期)2018-01-03 06:19:25
中南大学学报(自然科学版)(2016年2期)2017-01-19 07:36:58