
基于响应面和遗传算法的尾座式无人机结构参数优化
2019-06-04 01:10刘文帅姚小敏李超群张梦飞淡煦珈韩文霆
农业机械学报 2019年5期
刘文帅 姚小敏 李超群 张梦飞 淡煦珈 韩文霆
(1.西北农林科技大学机械与电子工程学院, 陕西杨凌 712100; 2.西北农林科技大学旱区农业水土工程教育部重点实验室, 陕西杨凌 712100; 3.南京禾谱航空科技有限公司, 南京 211300; 4.西北农林科技大学水土保持研究所, 陕西杨凌 712100)
0 引言
尾座式无人机是一种尾座坐地式垂直起降飞行器,融合了多旋翼的垂直起降特性和固定翼的高效巡航特性,有效解决了多旋翼航程短和飞行效率低,固定翼无人机起降难、部署时间长和辅助保障设备多等问题,可以满足日益复杂的农业低空遥感作业要求[1-3]。相较于其他垂直起降无人机,尾座式无人机无需额外的转动控制部件,具有结构简单、质量轻、整机自然稳定性好和操作简便等优点,近些年得到广泛关注。
国内外学者常用计算流体动力学(Computational fluid dynamics,CFD)方法进行尾座式无人机的设计和气动优化,通过CFD数值模拟方法能够获得无人机的升力、阻力和升阻比等气动特性参数,通过气动参数的分析,在机翼、螺旋桨、小翼和副翼等部件的结构参数优化、气动布局优化和动力学建模等方面已取得了一定的研究成果[4-17]。由于CFD计算方法只能获得离散的数据点,很难进行全局范围内最优结构参数的求解,因此基于全局最优点求解的响应面和多目标遗传算法(Multi-objective genetic algorithm,MOGA)受到越来越多的关注,并逐渐应用到结构设计中。在复合材料无人机的结构强度改进、机翼的减重、动力系统飞行效率的提高、换热器结构参数优化和加工机床的结构设计等方面取得了很多研究成果[18-25]。
本文将响应面和多目标遗传算法应用于尾座式无人机的优化设计,构建无人机的翼展长、后掠角、小翼高和小翼厚4个结构参数与升阻比和阻力的响应面模型,以升阻比最大、阻力最小为优化目标,采用多目标遗传算法求解最优结构参数。
1 材料与方法
1.1 尾座式无人机结构与参数
1.1.1结构布局
设计的尾座式无人机采用飞翼双动力前拉布局形式,如图1所示,主要由左右对称的机翼、小翼、电机座、正反转电机和螺旋桨组成。碳杆贯穿机翼、电机座和小翼,起到机身加固和安装定位的作用。机翼通过翼根胶粘的方式组成机身,小翼和电机座通过胶粘的方式固定在机身上,并且保持小翼和电机座轴线与机身轴线平行。电机和螺旋桨通过螺纹固定在电机座上。
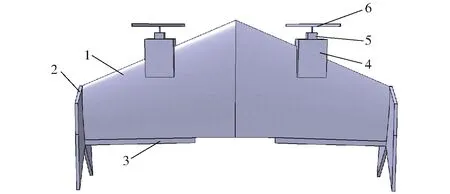
图1 尾座式无人机结构示意图Fig.1 Schematic of tail-sitter UAV1.机翼 2.小翼 3.舵面 4.电机座 5.电机 6.螺旋桨
尾座式无人机有多旋翼起降和固定翼巡航两种飞行模式。多旋翼起降时,通过正反转螺旋桨为无人机提供垂直上升的动力;并通过两个反转差速电机的转速进行左右的姿态控制;通过舵面的俯仰运动进行无人机的俯仰姿态调节。当飞机达到一定高度时,切换为固定翼巡航模式,电机工作模式转换为反转同速电机,为固定翼巡航状态提供前拉动力;舵面的工作模式转换为固定翼混控模式,进行固定翼的俯仰和盘旋姿态的控制。
1.1.2结构参数范围
尾座式无人机采用飞翼布局形式,根据文献[4-5]可知,翼展长、后掠角、小翼高和小翼厚是影响尾座式无人机升阻比和阻力的主要因素,如图2所示。
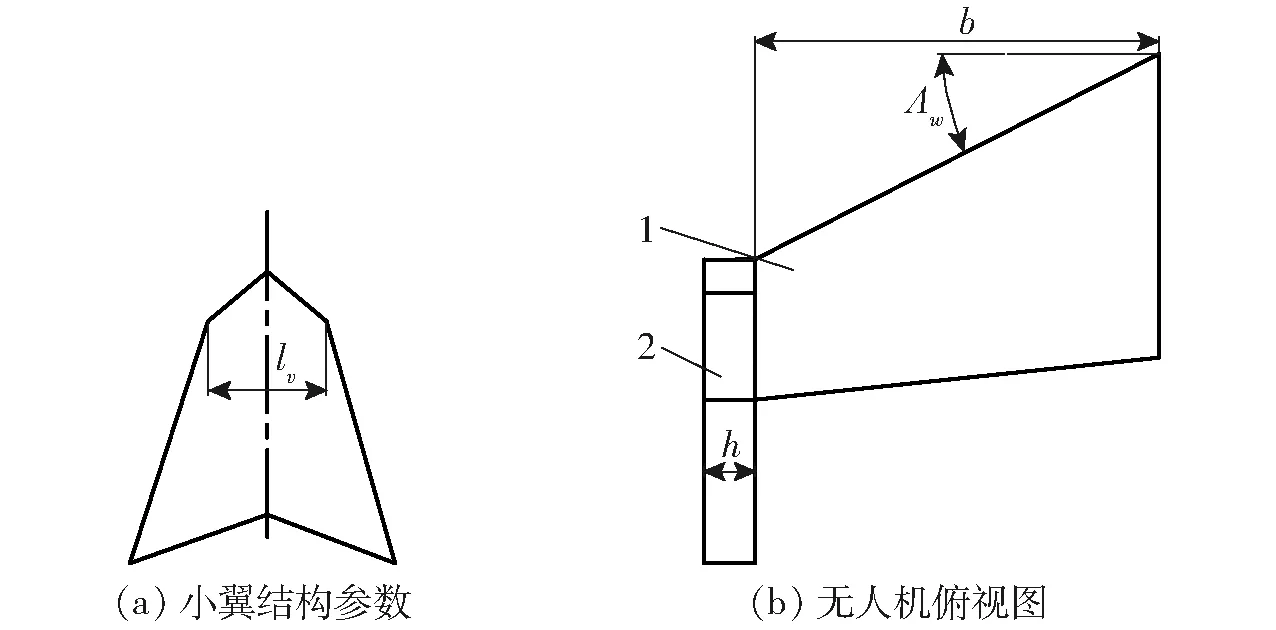
图2 尾座式无人机的结构参数Fig.2 Structural parameters of tail-sitter UAV1.机翼 2.小翼
由文献知现有的小型固定翼无人机的翼展长b的范围为900~1 200 mm,后掠角Λw为15°~60°,小翼高lv为0.05b~0.3b,小翼厚h为3~7 mm,确定尾座式无人机结构参数范围为:翼展长900~1 300 mm,后掠角为15°~35°,小翼高25~45 mm,小翼厚3~7 mm。本文以翼展长1 000 mm,后掠角20°、小翼高30 mm和小翼厚6 mm为原始样机进行结构参数优化。
1.1.3结构参数优化流程
尾座式无人机结构参数优化流程如图3所示。
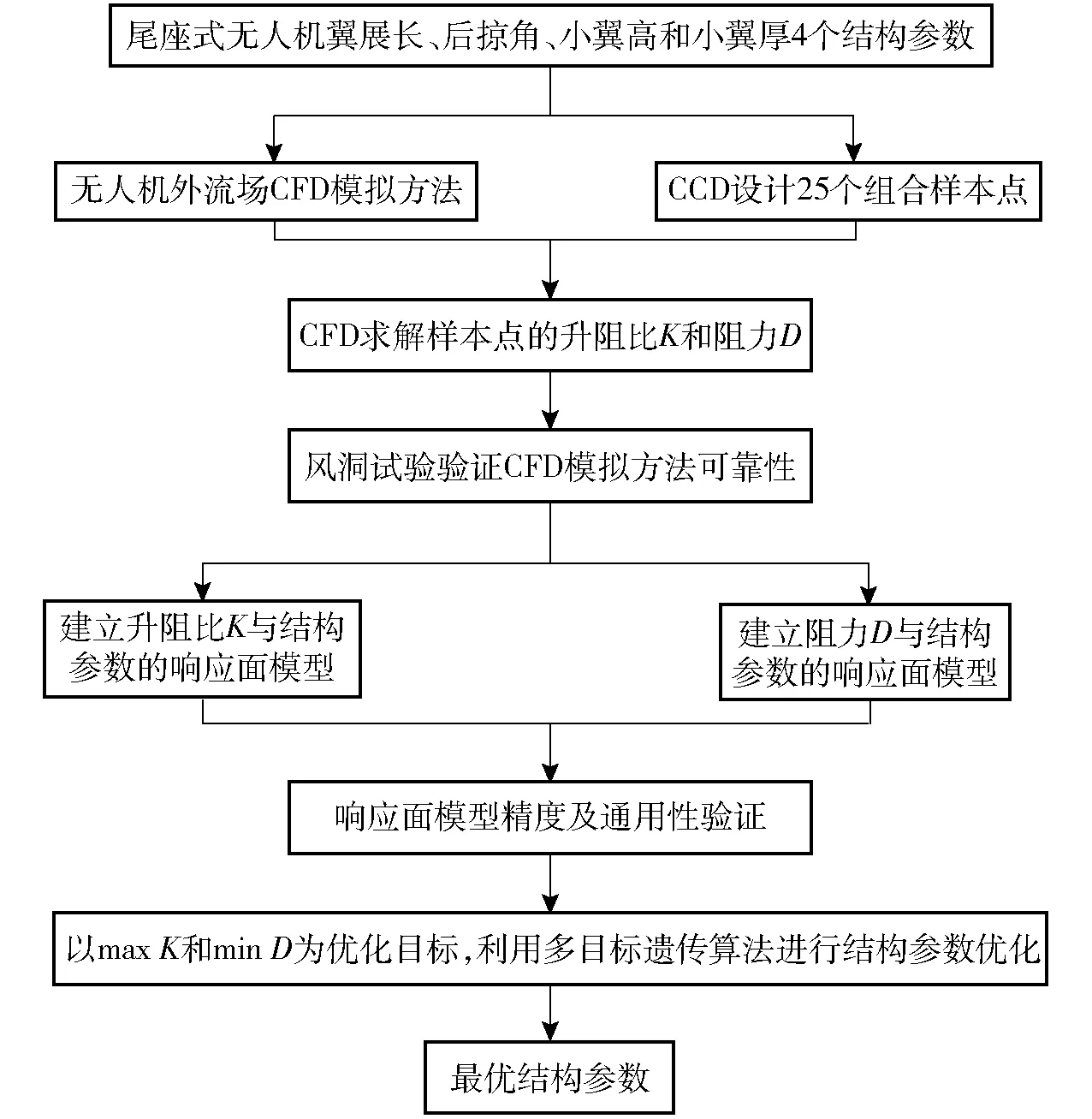
图3 结构参数优化流程图Fig.3 Flow chart of structural parameter optimization
本文对尾座式无人机的翼展长、后掠角、小翼高和小翼厚4个结构参数进行优化,通过CCD进行4个结构参数的组合设计得到25个组合样本点和3个对照样本点,在CFD中模拟计算得到各样本点的升阻比和阻力,并通过风洞试验验证CFD数值模拟方法的可靠性。利用多项式回归的方法分别建立了升阻比和阻力与结构参数的响应面模型,并由对照样本点的CFD模拟值进行验证,以升阻比最大和阻力最小为优化目标,利用多目标遗传算法进行结构参数优化得到最优结构参数。
1.2 无人机外流场数值模拟方法
尾座式无人机的结构优化是反复权衡续航时间和姿态转换稳定性的过程,其中较大的升阻比能够提高无人机的气动效率,延长续航时间;较小的阻力能够降低无人机的侧向滑移,提高转换过程的稳定性。本文采用CFD数值模拟的方法对尾座式无人机的升阻比和阻力进行模拟计算。由于螺旋和电机布置在机翼的气动弦长上,螺旋桨在机翼上作用力可视为0°攻角下的气动力,相对较小可以忽略。并且由于无人机为左右对称布局,利用CATIA软件对机身左侧建立三维模型,并去掉螺旋桨、电机和电机座等结构。将三维模型导入ANSYS的Geometry模块构建外流场的三维实体模型,利用ICEM对外流场进行非结构体网格划分,而且为了更好地捕捉无人机近壁面外流场区域的流动细节,对无人机周围网格进行局部加密处理,如图4a所示,最终生成的外流场网格数量为230万个节点,无人机近壁面处的网格如图4b所示。
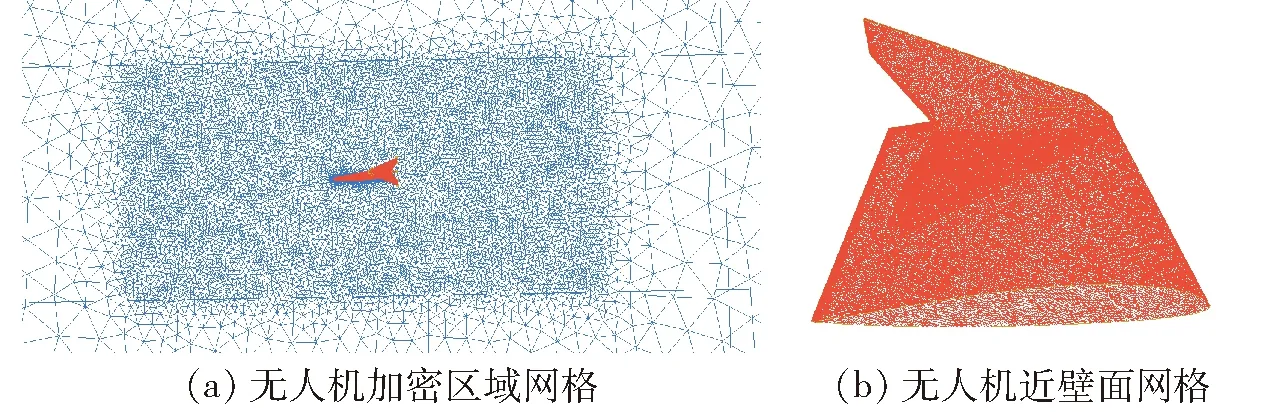
图4 无人机外流场网格Fig.4 Grid of UAV outflow
尾座式无人机的姿态转换过程是攻角逐渐增大的过程,当攻角超过18°时进入失速状态,为非定常流动模式,现有的CFD软件无法进行精准模拟,本文模拟不同结构的无人机在攻角为4°~12°时的升阻比和阻力。无人机的飞行速度为12 m/s、雷诺数为50 000时为湍流,选用SSTk-ω模型,入口速度为12 m/s,速度夹角为4°~12°,出口压力为标准大气压,计算区域的边界假定为无滑移条件,用标准的边界方程进行近壁面处理,用SIMPLE算法进行方程求解。
1.3 组合样本点设计及模型构建方法
1.3.1组合样本点设计
CCD设计是在两因子全水平试验的基础上增加了重复使用的中心点和轴向点,使得每个因子有5个变量水平(如图5所示),以适应二次模型的拟合。利用CCD对翼展长、后掠角、小翼高和小翼厚4个结构参数进行设计得到16个立方点、8个轴向点和1个中心点,总计25个组合样本点。在组合样本点之外随机抽取3个对照样本点,用于验证响应面模型的通用性。
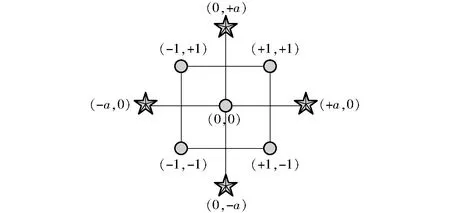
图5 CCD样本点设计Fig.5 Design of CCD sample points
1.3.2模型构建方法
利用CFD计算25个组合样本点的升阻比和阻力,并采用二次多项式拟合的方法分别构建升阻比和阻力与4个结构参数的响应面模型。响应面模型表示为
yi=Cti+ε
(1)
其中
C=[C1C2C3C4]
式中yi——第i个点的响应面模型估算值
ti——第i个点的回归系数
C——回归参数矩阵
ε——相对误差
1.4 多目标遗传算法
尾座式无人机以固定翼巡航模式进行目标区域的遥感图像采集,在设计过程中应保证无人机获得较大的升阻比。姿态转换过程中俯仰角从0°逐渐增加到90°,在该过程中为保证姿态转换过程的平稳性,无人机的阻力应尽量小,则无人机的多目标遗传算法公式表示为
maxK(x)=[K1(x)K2(x) …KN(x)]
(2)
minD(x)=[D1(x)D2(x) …DN(x)]
(3)
其中
x=(x1,x2,x3,x4)
式中x——结构参数向量
xd——结构参数
MOGA的求解过程是一个种群构建、个体求解和个体寻优的循环过程,直至达到设定的目标函数。利用1.3.2节构建的响应面模型进行个体求解,并通过约束条件进行个体筛选,并重新构建种群,循环迭代直至寻找到升阻比最大且阻力最小的最优个体,即为最优结构参数。
1.5 数值模拟方法验证
1.5.1试验设备
基于升阻比和阻力的CFD模拟值建立响应面模型,采用风洞试验进行CFD数值模拟方法的验证。在25个CCD组合样本中随机选择一个样本点参数为:翼展长1 000 mm、后掠角27°、小翼高40 mm和小翼厚5 mm,并分别测定样本在不同风速下的升阻比和阻力。由于风洞的风场直径(800 mm)限制,根据风洞试验的相似准则,将样本按照1∶0.6的比例进行缩放,得到风洞模型尺寸为翼展长600 mm、后掠角27°、小翼高24 mm和小翼厚3 mm,采用3D打印技术进行风洞模型的加工,如图6所示。
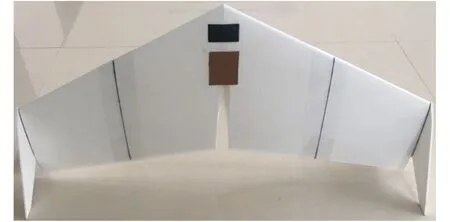
图6 风洞试验样机Fig.6 Wind tunnel experimental prototype
1.5.2试验条件与方案
风洞试验系统包括无人机模型、飞机支架、六分量应变天平、风机、变频器和数据采集控制系统等,如图7所示。无人机模型加工过程中,为保证机翼的流线分布形式和表面光洁,采用展向扫描递推的打印方式进行模型的加工,并对凹槽和缝隙进行蒙皮处理。为降低支架对无人机尾部气流的干扰,采用天平内嵌机身和支杆延伸的安装方式进行样机的固定。为保证模型在风场中数据的准确性,试验过程中无人机保持在风场的中心位置(离地1.4 m)。试验过程中变频器控制风机转速待风速平稳后,由六分量应变天平进行升力和阻力的采集,并由数据分析系统对采集到的1 000组数据进行处理,最终得到无人机的升阻比和阻力。
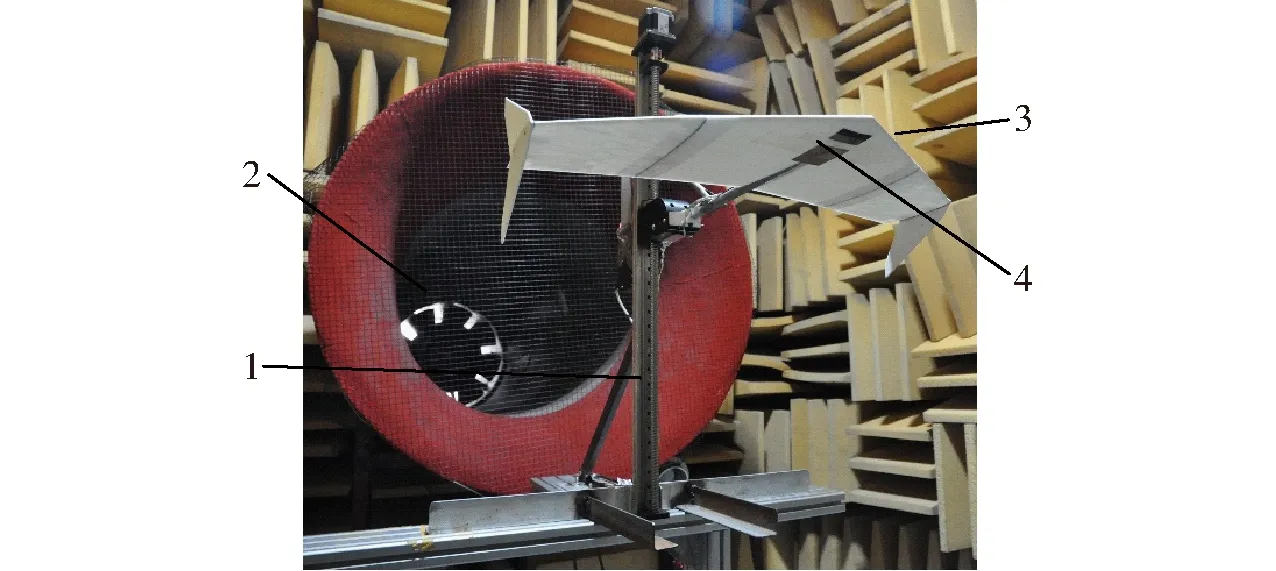
图7 风洞试验系统Fig.7 Wind tunnel experiment system1.天平支架 2.风机 3.试验样机 4.六分量应变天平
风洞试验在西北工业大学翼型叶栅空气动力学重点实验室内进行,试验中测定无人机俯仰角为8°,通过变频器将风速稳定在12~20 m/s之间,间隔2 m/s,测定样机在不同风速下的升阻比和阻力,并将CFD的模拟值与风洞试验测量值进行对比。
1.5.3数值模拟结果验证
无人机工况的改变,实际上是雷诺数的变化。依据雷诺数相似理论,几何相似的前提下,相同的雷诺数具有相似的气动特性[26]。绘制样本和风洞模型在不同雷诺数下的升阻比和阻力散点图,并与风洞数据进行对比,如图8所示。
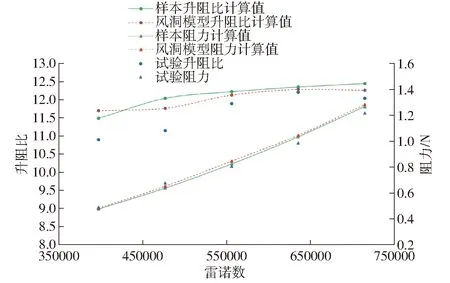
图8 风洞试验验证结果Fig.8 Wind tunnel test results
风洞模型与样本的升阻比相对误差小于2.3%,阻力相对误差小于2.7%,表明基于等比缩放的方法进行数值模拟具有较高的可信度;风洞模型的仿真数据与试验的升阻比相对误差小于7.3%,阻力相对误差小于5.8%;样本的仿真数据与试验的升阻比相对误差小于8.0%,阻力的平均相对误差为5.7%,在允许的误差范围内。风洞模型与样本的误差原因是缩放带来的原理误差;风洞模型仿真数据与试验数据的误差原因是风洞模型采用三维打印加工,模型的表面粗糙度会影响机翼近壁面的流场分布,风洞模型阻力较小,试验过程中模型的抖动和信号干扰等因素均会影响阻力的测量精度;样本仿真数据与试验的误差原因是由缩放原理和试验环境共同导致,但试验结果误差小于8%,在允许范围内,表明CFD数值模拟方法可靠,可以用于尾座式无人机的外流场模拟。
2 结果与分析
2.1 结构参数对升阻比和阻力的影响
2.1.1结构参数对升阻比的影响
无人机的升阻比主要与翼展长b、后掠角Λw、小翼厚h和小翼高lv等结构参数有关,建立各结构参数在不同攻角α下的升阻比变化曲线,如图9~12所示。
由图9可知,翼展长从900 mm增加到1 300 mm的过程中无人机的升阻比呈线性增加。因为无人机的升阻比与展弦比有关,展弦比越大升阻比越大。当其它结构参数确定时,展弦比与翼展长呈线性关系,即翼展长与升阻比线性相关。
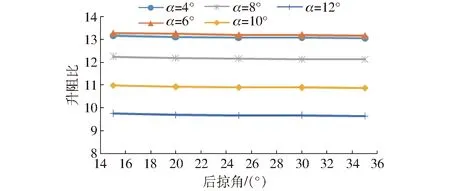
图10 后掠角与升阻比的关系曲线Fig.10 Relationship curves between sweep angle and lift drag ratio
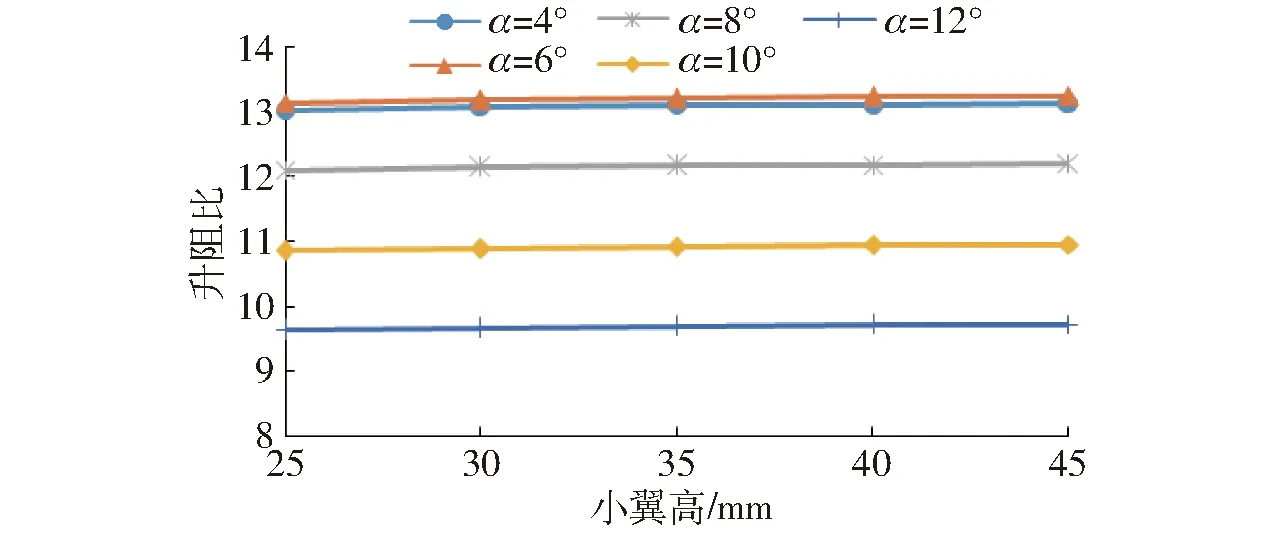
图11 小翼高与升阻比的关系曲线Fig.11 Relationship curves between wing height and lift drag ratio
在攻角不同的情况下,升阻比随后掠角和小翼高的变化如图10、11所示。在相同的攻角下升阻比随后掠角的增大而略有减小,随小翼高的增加而略有增大。当攻角为12°时,后掠角为35°的升阻比比后掠角为15°的降低了1%;小翼高为25 mm的升阻比比小翼高为45 mm的升阻比下降了1%,表明后掠角和小翼高对升阻比的影响较小。因为升阻比主要与展弦比相关,展弦比主要与翼展长和气动弦长相关,在梯形翼中随着后掠角和小翼高的增加气动弦长的变化较小,因此后掠角对升阻比K影响较小。
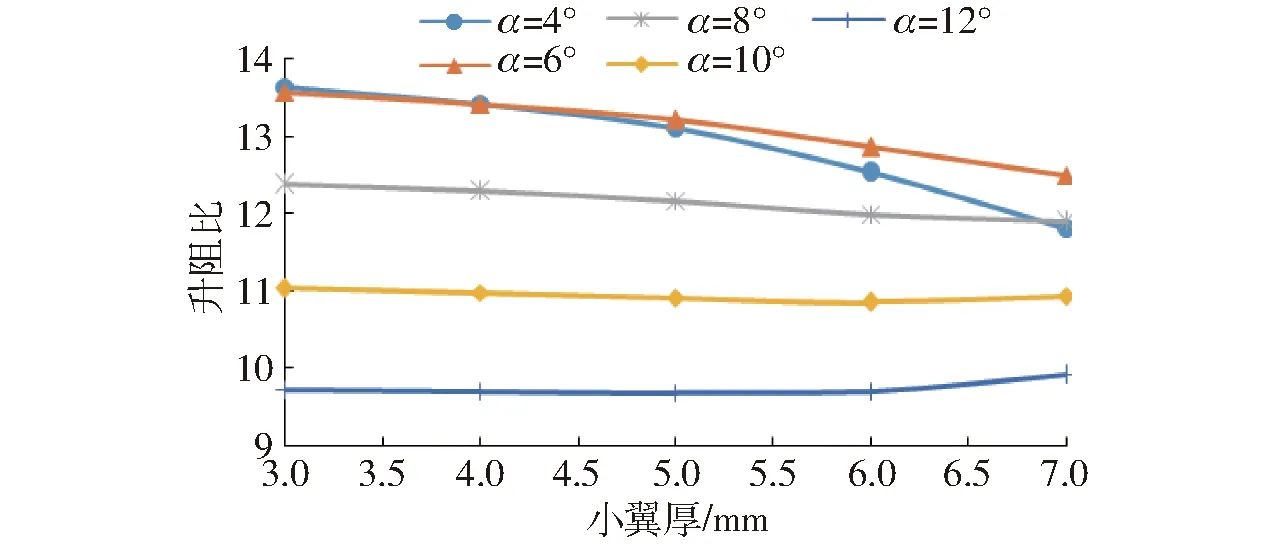
图12 小翼厚与升阻比的关系曲线Fig.12 Relationship curves between wing thickness and lift drag ratio
由图12可知,在小攻角4°~8°时,升阻比随小翼厚的增加而逐渐减小,并且4°攻角时升阻比的下降速率最大;在大攻角10°~12°时,随着小翼厚的增加,升阻比先减小后增大。因为在小攻角时,小翼主要用于降低翼尖扰流,减小诱导阻力提高升阻比,并且随着小翼厚的增加,小翼表面的扰流情况加剧,反而会增加诱导阻力降低升阻比;在大攻角的情况下,小翼表面会出现涡的脱落,进而影响机翼表面的气流分布。
2.1.2结构参数对阻力的影响
在不同翼展长的情况下阻力随攻角的变化曲线如图13所示。计算结果表明,在相同的攻角下,阻力随翼展长的增加而增大。此外,在其它几何参数确定时,随着翼展长的增加,阻力的增加速率变大。因为机翼上下表面的压强差产生了升力,并且由于气流压差的作用在翼尖附近会产生一个由下向上绕的诱导阻力,随着翼展长的增加,诱导阻力增大,因此增加了无人机的阻力。
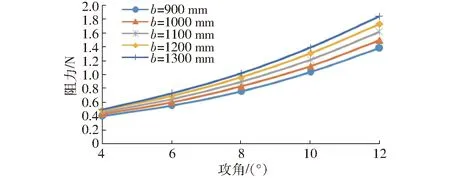
图13 攻角与阻力的变化曲线Fig.13 Relationship curves between attack angle and drag
图14显示了在不同的小翼厚时,阻力随后掠角的变化关系。结果表明随着后掠角的增大,阻力先增大后减小。在指定小翼厚的情况下存在阻力的最大值。因为在后掠角为15°~20°的变化过程中,机翼的后缘逐渐由后掠变为水平,由于后缘气流附着面积增加,导致阻力增加;在后掠角在20°~35°的变化过程中,随着前缘后掠角的增加导致机翼壁面附近气流的提前分离,无人机的阻力逐渐减小。此外,在较小的小翼厚时,阻力的增加速率较慢。它可以解释为当小翼厚小于4 mm时,小翼可以视作为薄片用于降低翼尖扰流,进而减小诱导阻力;当小翼厚大于4 mm时,小翼可以视作翼展的延伸,并且在小翼厚方向上会生成新的诱导阻力,并且随着小翼厚的增加,诱导阻力变大。结果表明,当后掠角增加时,阻力先增大后减小;当小翼厚增加时,阻力逐渐增加。
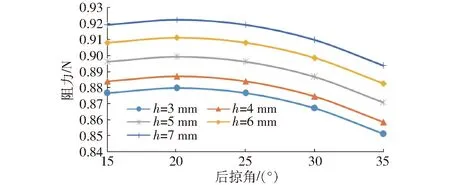
图14 后掠角与阻力的变化曲线Fig.14 Relationship curves between sweep angle and drag
2.2 响应面模型建立与精度验证
2.2.1响应面模型建立
利用Design-Expert软件,采用逐步回归的方法构建了翼展长、后掠角、小翼高和小翼厚4个结构参数与升阻比和阻力的二次响应面方程

(4)

(5)
根据响应面方程对结构参数进行了敏感性分析,灵敏度越高,表明该结构参数对性能的影响越显著,结果如图15所示。
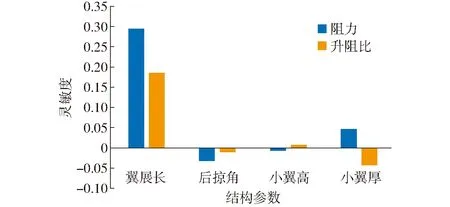
图15 结构参数敏感性分析结果Fig.15 Sensitivity of structural parameters
在阻力方面翼展长和小翼厚为正效应,后掠角和小翼高为负效应,并且在灵敏度上b>Λw≈h>lv。在升阻比方面,翼展长和小翼高为正效应,后掠角和小翼厚为负效应;并且在灵敏度上b>h>Λw>lv。
2.2.2响应面模型精度评价及验证
利用构建的升阻比和阻力响应面模型进行了MOGA中个体的求解,因此需要对响应面模型的精度和通用性进行验证。用3个对照样本点的CFD模拟值作为真值,并与响应面预测值进行对比,结果如表1所示。
阻力的相对误差随着翼展长的增加逐渐减小,升阻比的相对误差随着翼展长的增加先减小后增大,3个对照点的相对误差小于3%,表明响应面模型具有较高的精度和良好的通用性,可用于尾座式无人机升阻比和阻力的预测。
2.3 最优结构参数
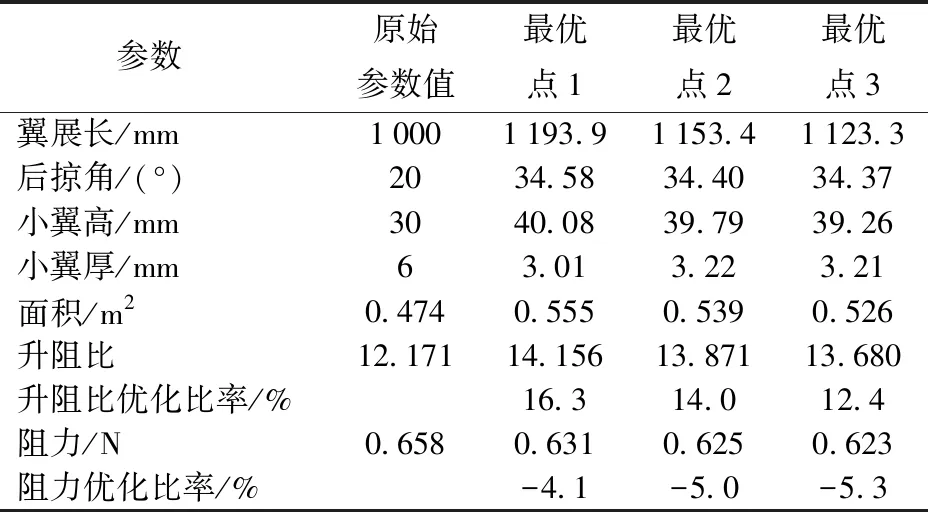
以升阻比取得最大值、阻力取得最小值为目标函数,利用MOGA在全局范围内寻找最优结构参数。采用筛选法构建初始种群,利用响应面模型进行升阻比和阻力的计算,如图16所示,得到了3组最优的结构参数如表2所示。其中最优点1的升阻比提高了16.3%,阻力降低了4.1%。3个优化模型的升阻比平均提高了14.2%,阻力降低了4.8%,均优于原始样机。对比3架样机的面积可知,3号样机机翼面积最小,在姿态转换过程中能减小侧向偏移量,因此本文选定最优点3为最终模型。则尾座式无人机的结构参数为:翼展长1 123 mm、后掠角34°、小翼高39 mm、小翼厚3 mm。
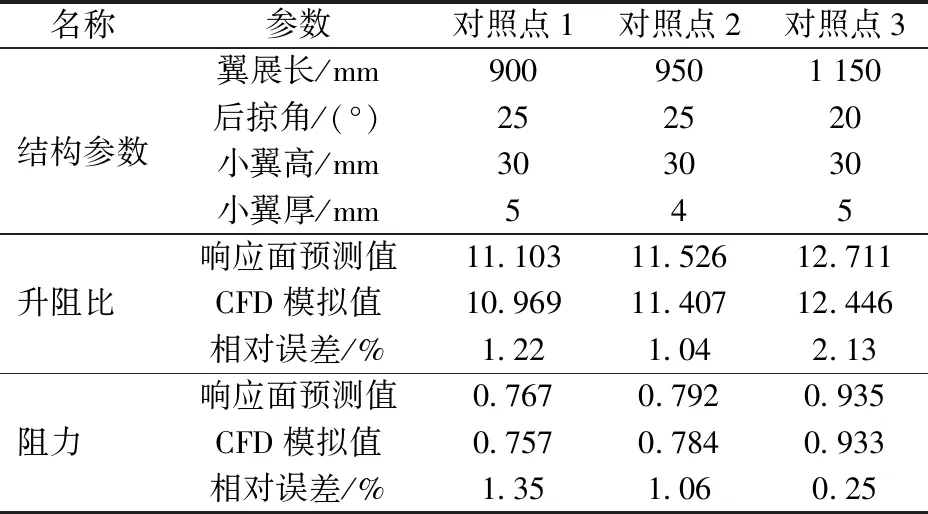
表1 响应面模型精度验证Tab.1 Accuracy verification of response surface model
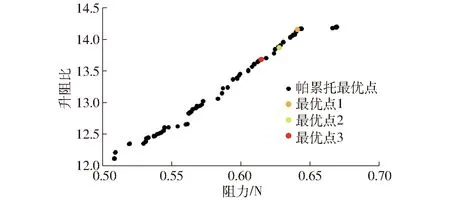
图16 多目标遗传算法寻优结果Fig.16 MOGA optimization result
参数原始参数值最优点1最优点2最优点3翼展长/mm10001193.91153.41123.3后掠角/(°)2034.5834.4034.37小翼高/mm3040.0839.7939.26小翼厚/mm63.013.223.21面积/m20.4740.5550.5390.526升阻比12.17114.15613.87113.680升阻比优化比率/%16.314.012.4阻力/N0.6580.6310.6250.623阻力优化比率/%-4.1-5.0-5.3
3 结论
(1)利用CFD对25组样本点的升阻比和阻力进行了数值模拟,样本模拟数据、风洞模型模拟数据和试验数据的对比分析表明,样本与风洞模型的相对误差小于2.7%,风洞模型与试验的相对误差小于7.3%,样本与试验的相对误差小于8.0%,说明数值模拟方法可靠,可以用于尾座式无人机的外流场模拟。
(2)构建了结构参数与升阻比和阻力的响应面模型,模型相对误差小于3%;基于响应面模型的敏感性分析结果表明,在阻力方面翼展长和小翼厚为正效应,后掠角和小翼高为负效应,其中翼展长为主要影响因素;在升阻比方面,翼展长和小翼高为正效应,后掠角和小翼厚为负效应,其中翼展长和小翼厚为主要影响因素。
(3)升阻比随着翼展长和小翼高的增加而增大,后掠角和小翼高对升阻比的影响较小,当攻角为4°~8°时,升阻比随小翼厚的增加而减小,当攻角为10°~12°时,升阻比随小翼厚的增加而增大;阻力随着翼展长和小翼厚的增加而增大,随小翼高的增加而减小,随后掠角的增加先增大后减小。
(4)利用多目标遗传算法确定了尾座式无人机的最优结构参数为:翼展长1 123 mm、后掠角34°、小翼高39 mm、小翼厚3 mm。与原始样机相比升阻比提高了12.4%,阻力降低了5.3%。
猜你喜欢
电影文学(2021年16期)2021-09-29
电影文学(2021年14期)2021-08-11
动漫界·幼教365(小班)(2021年4期)2021-05-23
宇航总体技术(2019年5期)2019-10-11
兵器装备工程学报(2019年7期)2019-08-13
厦门航空(2019年1期)2019-01-12
东坡赤壁诗词(2018年5期)2018-12-17
学苑创造·A版(2018年5期)2018-05-28
中学生百科·小文艺(2017年7期)2018-02-07
火力与指挥控制(2017年11期)2017-12-19
