
穴盘苗自动移栽机苗钵夹持力检测系统设计与试验
2019-06-04 01:10张海洋姬江涛
农业机械学报 2019年5期
王 俊 张海洋 金 鑫 姬江涛 高 颂
(1.河南科技大学农业装备工程学院, 洛阳 471003; 2.机械装备先进制造河南省协同创新中心, 洛阳 471003)
0 引言
旱作穴盘苗自动移栽取、投苗过程中苗钵损伤程度直接影响穴盘苗后期成活率,苗钵夹持力是评判苗钵损伤程度的关键[1-3]。夹持力可调式穴盘苗自动移栽机由取苗爪插入苗钵取苗,并将穴盘苗投入栽植机构中完成投苗[4]。取、投苗过程中,移栽机的稳定性不可避免会产生变化,导致取苗爪对苗钵的夹持力发生改变。如夹持力变小,则无法成功取出穴盘苗;夹持力变大,则易造成苗钵散坨与破损,严重影响穴盘苗移栽成功率和后期成活率,导致移栽质量下降、产量降低。实时监测自动移栽机取、投苗过程中苗钵夹持力大小对提升移栽质量至关重要[5-7]。
夹持力可调式自动移栽机一般分为气缸式与机械式。气缸式力调节精度高,但结构复杂、成本高,如张丽华等[8]设计的指针夹取式取苗爪机构,采用气缸驱动单元实现夹持力调节与取苗爪驱动;机械式具有成本低廉、可靠性高等优点,如赵匀等[9]设计的一种通过凸轮调节夹持力大小的蔬菜穴盘苗移栽机构。目前机械式仍是夹持力调节的主要方式。
20世纪90年代,美国伊利诺伊大学TING等[10]探索采用电容式力传感器检测苗钵夹持力,但检测灵敏度差、精度低。目前,苗钵夹持力检测仍处于试验室测量阶段,缪小花等[11]以黄瓜穴盘苗为对象,利用电子万能试验机和质地分析仪,运用正交试验分析填充量、基质成分体积比、含水率对拉拔力及钵体抗压性能的影响;王英等[12]以西兰花穴盘苗为对象,采用电子万能试验机,分析穴盘规格、苗龄和含水率对土钵抗压强度的影响。试验室苗钵夹持力检测设备测量准确,但成本高、体积大,无法应用于田间在线测量。
苗钵夹持力检测为接触力测量,其受力范围小、数值动态变化、受环境噪声影响大。近年来,国内外学者在接触力检测方面做了大量研究工作[13-14],其敏感元件主要有导电橡胶、压敏电阻、压电陶瓷及PVDF压电薄膜等,徐菲等[15]研究了一种基于导电橡胶的三维力触觉传感器,实现对三维力信息的检测;周俊等[16]以压敏电阻作为敏感材料设计一种触觉传感器,感知果蔬抓取过程中的接触力;COTTON等[17]把压电陶瓷双压电晶片作为敏感元件,检测执行机构对果蔬的夹持力;陶镛汀等[18]设计了一种PVDF触觉传感器,通过触觉信号处理分析,检测果蔬的表面粗糙度特性。导电橡胶具有良好的柔韧性、耐磨性,但导电稳定性差,存在弛豫现象,易影响传感器的精度、响应速度;压敏电阻具有价格低廉、响应时间快、抗冲击能力强等优点,而其抗老化性能低,不适用于田间恶劣环境;压电陶瓷压电效应好、灵敏度高,但柔韧性偏低,安装条件受限;PVDF压电薄膜具有灵敏性高、厚度薄、频响宽、柔顺性好及动态特性优异等优点[19-21],更适合于柔性、微弱低频夹持力信号检测装置,但其输出为电荷信号,且信号微弱,需经信号调理电路进行处理。
针对夹持力可调取苗机构中取苗爪安装空间狭小、检测装备布置不当易伤苗或回带钵苗基质等问题,本文以辣椒穴盘苗为作业对象,研究一种穴盘苗自动移栽机苗钵夹持力检测系统,用于监测移栽机取、投苗过程中取苗爪对苗钵的夹持力。
1 穴盘苗自动取苗夹持检测试验台
1.1 试验台组成及工作原理
穴盘苗自动取苗夹持检测试验台主要由夹持力检测系统、苗盘输送机构、取苗机构、栽植机构等组成,如图1所示,用于实时监测苗钵夹持力。
穴盘苗自动取苗夹持检测试验台工作过程如下:由步进电机驱动机械连杆转动,进而驱动凸轮和取苗机构主架尾端滑轴转动。凸轮做有规律的往复运动,取苗机构尾端滑轴在滑槽里沿轨迹曲线做自上而下、自下而上的往复运动,驱动取苗爪由竖直状态变为前伸状态,在取苗机构尾端滑轴沿着滑槽自上而下运动时,取苗机构夹爪由竖直投苗状态变为前伸取苗状态,当取苗机构尾端由滑槽低端向上运动的同时,取苗机构夹爪由前伸夹苗状态转换为竖直投苗状态。每个取投苗周期内,固定于取苗爪内侧的PVDF压电薄膜感知夹持力的变化,经信号调理电路处理后,无线发送至数据采集终端,实现夹持力数据的处理、记录与分析。
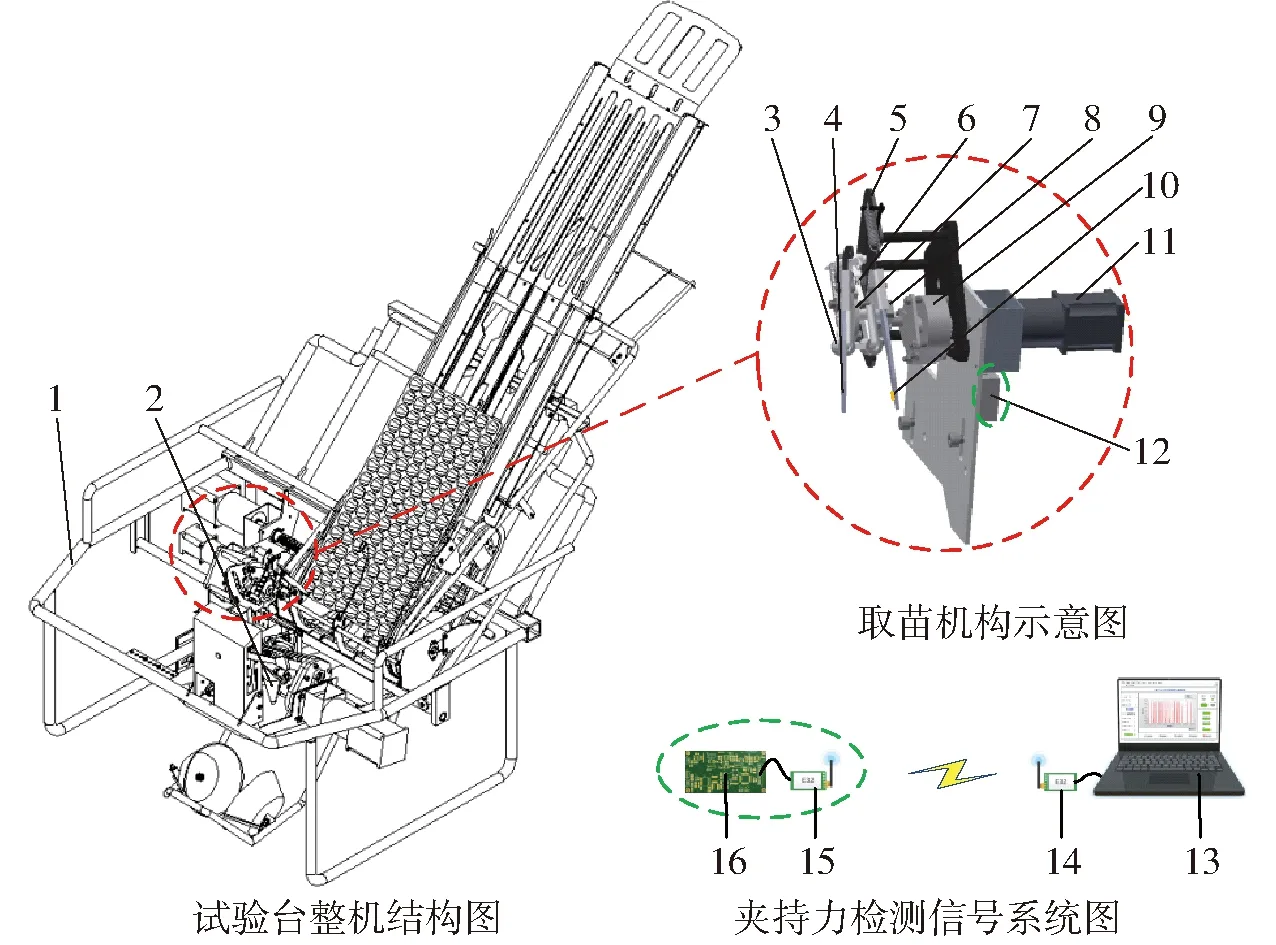
图1 穴盘苗自动取苗夹持检测试验台Fig.1 Test-bed for automatic picking up and clamping of seedlings in acupoints1.机架 2.栽植机构 3.取苗机构主架 4.取苗爪 5.滑槽 6.螺旋弹簧 7.凸轮 8.机械连杆 9.齿轮箱 10.PVDF压电薄膜 11.步进电机 12.信号采集装置 13.计算机 14、15.无线通信模块 16.信号调理电路
1.2 PVDF压电薄膜布置分析
分析取苗爪夹持苗钵基质的受力特性,合理确定PVDF压电薄膜布置位置是可靠、精准检测夹持力的关键。
取苗时,苗钵受力分析如图2a所示,苗钵受取苗爪在接触面产生的静摩擦力F1、F2,取苗爪对苗钵的夹持力F3、F4,苗钵重力及苗钵与穴盘的黏附力竖直分力的合力F0。苗钵对取苗爪的反作用力大小与F3、F4相等,方向与F3、F4相反,且垂直于取苗爪,该反作用力即为所需检测的夹持力信号。因取苗爪对称分布,在单侧取苗爪内表面贴敷PVDF压电薄膜,令夹持力垂直作用于其柔性表面,可灵敏检测夹持力变化。此时,PVDF压电薄膜表面受力情况如图2b所示。
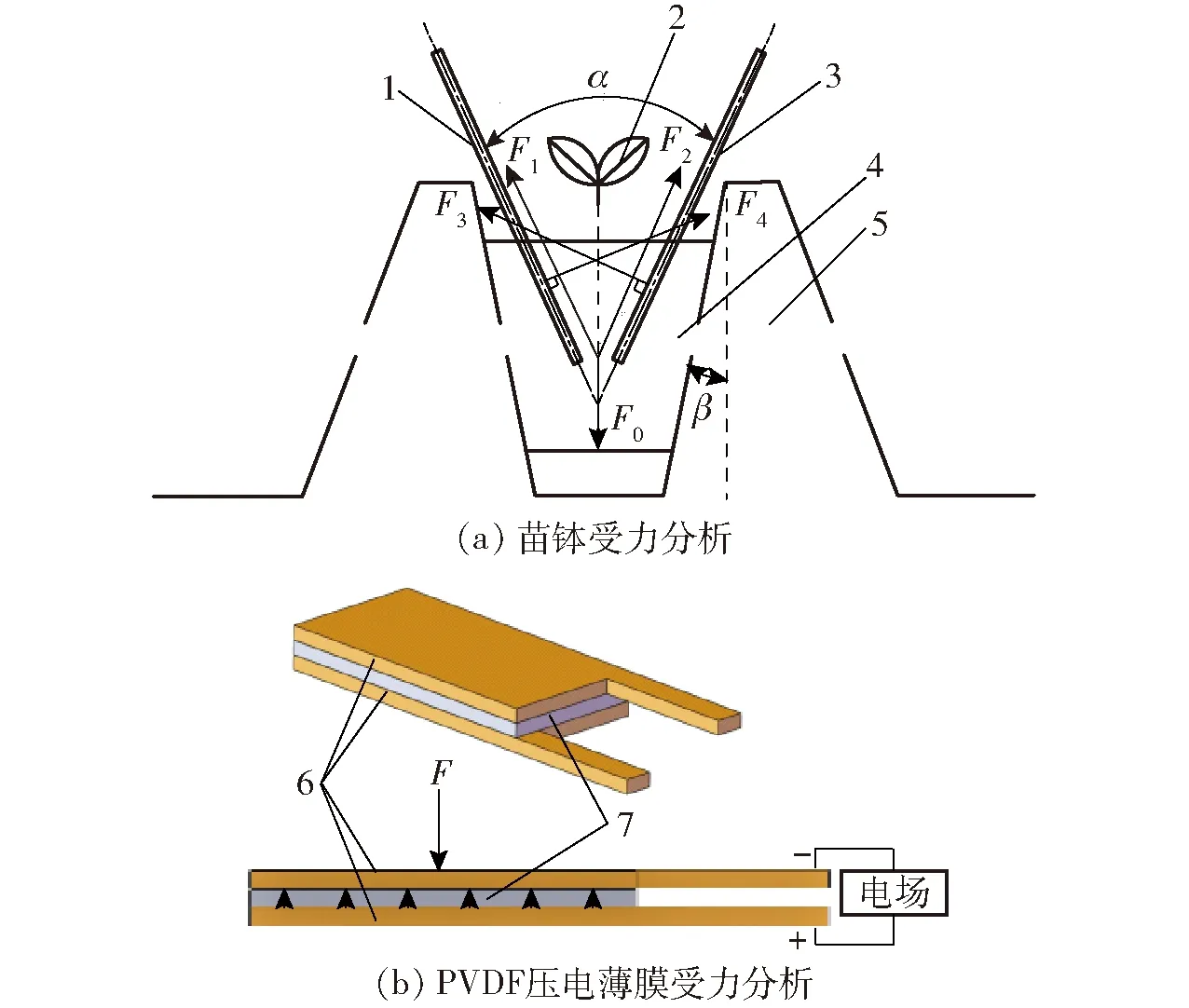
图2 PVDF压电薄膜布置分析Fig.2 Analysis of PVDF piezoelectric film arrangement1、3.取苗爪 2.穴盘苗 4.苗钵 5.穴盘 6.铜箔 7.PVDF
分析可知,取苗爪插入钵体深度约为28 mm,安装时,将尺寸为10 mm×5 mm的PVDF压电薄膜(压电应变常数-33 pC/N,厚度110 μm)通过环氧树脂粘结剂粘贴于右取苗爪内侧表面,距取苗爪尖端23 mm,可保证取苗爪插入苗钵时,PVDF压电薄膜表面与苗钵基质完全接触,图3为PVDF压电薄膜布置示意图。此外,与PVDF压电薄膜正负极连接的导线经串线孔由布线槽引出,通过涂抹热熔胶方式将其固定在布线槽里并压平,防止回带苗钵基质。
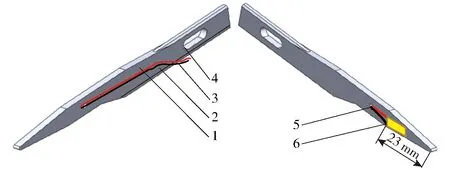
图3 PVDF压电薄膜布置示意图Fig.3 Schematic of PVDF piezoelectric film arrangement1.取苗爪 2.布线槽 3.导线 4.固定孔 5.串线孔 6.PVDF压电薄膜
2 夹持力信号监测系统设计
苗钵夹持力信号监测系统由夹持力检测传感器、信号调理电路、无线通信模块、信号采集软件系统、计算机等组成。夹持力检测传感器采集取苗爪对苗钵的夹持力信号,首先通过信号调理电路进行电荷电压信号转换、放大及低通滤波,其次经编程控制微处理器将信号进行A/D转换,并通过无线通信模块发送到计算机信号采集软件系统,然后运用卡尔曼滤波器进行软件滤波,最后进行图形显示及信号存储。夹持力信号监测系统结构框图如图4所示,系统实物图如图5所示。
无线通信模块采用成都亿佰特公司生产的E32-TTL-100(433T20DC)型无线串口模块,载波频率为410~441 MHz,采用透明传输方式、 LoRa扩频技术,具有抗干扰能力强、保密性高等优点;微处理器采用香港宏晶科技公司生产的STC12C5A60S2型单片机,具有高速、低功耗、超强抗干扰等优点。
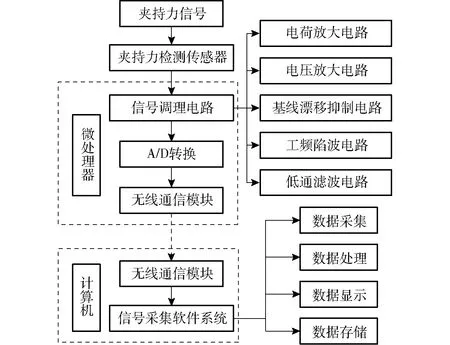
图4 夹持力信号监测系统结构框图Fig.4 Block diagram of clamping force signal monitoring system

图5 夹持力信号监测系统实物图Fig.5 Physical chart of clamping force signal monitoring system1.信号调理电路 2.电池 3、4.无线通信模块 5.信号采集软件系统 6.PVDF压电薄膜
信号采集软件系统由LabVIEW软件平台开发,通过卡尔曼滤波器对夹持力信号进行软件滤波,具有实时显示信号输出电压波形、信号回放及存储的功能。另外,软件系统增加报警功能,若苗钵夹持力超过夹持力设定上限值时,可进行报警提示,夹持力信号采集软件系统界面如图6所示。
2.1 夹持力检测信号调理电路设计
为有效处理PVDF压电薄膜采集的微弱电荷信号,设计了信号调理电路,具体包含电荷放大电路、电压放大电路、基线漂移抑制电路、工频陷波电路、二阶低通滤波电路。
PVDF压电薄膜是一种新型的高分子聚合物型压电材料,压电常数大、频响宽、柔顺性好、灵敏度高、机械韧性强,将其运用于穴盘苗自动移栽苗钵夹持力检测中具有以下优势:压电常数大,夹持力检测灵敏性高;频响宽(0.1~107Hz),满足苗钵夹持力信号的低频特性;柔顺性好,制成不同形状时,夹持力信号不失真;机械韧性强,田间恶劣环境下工作不易损坏[22-23]。
PVDF压电薄膜不置于电场时,压电方程为
Dm=dnjTj(m、n=1,2,3;j=1,2,…,6)
(1)
式中Dm——电位移,即所产生的电荷密度,pC/m2
T——应力,Pa
dnj——压电应变常数矩阵元素,pC/N
m、n——受力方向
j——极化方向
厚度方向受均匀的力时有
D3=d33T3
(2)
式中d33——压电应变常数
PVDF压电薄膜产生的电荷量Q为
Q=D3S=d33T3S
(3)
式中S——PVDF压电薄膜表面积
式(3)表明,PVDF薄膜表面输出的电荷量与垂直表面的压力呈线性关系。利用PVDF压电效应,可以将薄膜上的压力变化转换为电荷量的变化。
电荷放大电路如图7所示。首先选择电荷放大器作为前置放大电路,其主要作用是将高阻抗输入转变为低阻抗输出,并将PVDF压电薄膜输出的电荷信号转变为电压信号。忽略前端输入电阻与输入电容,可得电荷放大电路输出电压与传感器表面施加的力、反馈电容的关系为
(4)
式中C1——反馈电容
F——苗钵基质对PVDF压电薄膜表面施加的力
UO0——电荷放大器输出电压
由式(4)可知,输出电压与所受应力呈线性关系。
采用集成元件LF356M运算放大器作为电荷放大器的核心元件。反馈电阻R1与反馈电容C1的选择决定了电路的放大效果、稳定性以及电路的低频响应能力,选择R1阻值为100 MΩ,C1电容值为10 000 pF,计算得其低频响应截止频率为0.16 Hz,可获得较好的低频响应能力。
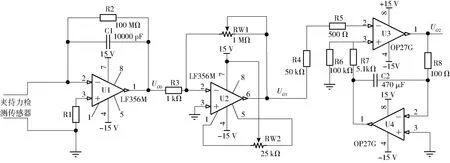
图7 电荷放大电路、电压放大电路及基线漂移抑制电路原理图Fig.7 Schematic of charge amplifying circuit, voltage amplifying circuit and baseline drift suppression circuit
为了防止电荷放大电路放大倍数过高导致波形失真,设计二级电压放大电路(图7)。电压放大电路由LF356M运算放大器U2、电阻R3、滑动变阻器RW1(1~1 000 kΩ)构成。电压放大电路是反比例运算放大,放大倍数Au1为RW1阻值与R3阻值之比的负数。其中,R3阻值为1 kΩ,则电压放大器的放大倍数Au1范围为1~1 000倍。
基线漂移抑制电路是由2个OP27G运算放大器组成的闭环回路,其原理是U3运放的输出通过R8对C2进行充电,若该运放反相输入端输入信号的电平出现漂移、波动,则充电结果会使U3的同相输入端输入出现等同于其反向输入端输入信号基线电平变化的电位,U3将二者相减后得到一个基线较稳定的输出UO2。根据所设计的闭环回路固有的性质能够抑制取投苗机构振动干扰和噪声引起的基线漂移现象。
工频陷波电路与低通滤波电路如图8所示,50 Hz工频陷波电路采用具有正反馈的有源双T型带阻滤波器,由低通滤波电路和高通滤波电路并联构成。
自动移栽机在田间作业时,由移栽机运转和地面激励产生的噪声信号为高频信号,故采用二阶低通滤波电路进行信号滤除。低通滤波电路(图8)由运算放大器U5,电阻R14、R15、R16、R17,电容C6、C7组成。设R14、R15为10 kΩ,C6、C7为0.33 μF,则截止频率fH=48.23 Hz。取R16、R17为10 kΩ,计算得电压放大倍数Au4=2。
夹持力检测传感器测得的苗钵所受夹持力F经信号调理电路转换为电压UO4,两者之间的转换关系为
(5)
可得夹持力F为
(6)
式中C1=10 000 pF,d33=-33 pC/N,Au4=2。
调节滑动变阻器RW1阻值为151.52 kΩ,则F=UO4,信号调理电路输出的电压即为苗钵所受夹持力。开发的信号调理电路实物图如图9所示。
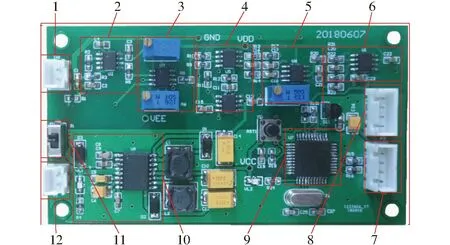
图9 信号调理电路实物图Fig.9 Physical diagram of signal conditioning circuit1.信号输入端口 2.电荷放大电路 3.电压放大电路 4.基线漂移抑制电路 5.工频陷波电路 6.低通滤波电路 7.无线通信模块接口 8.程序烧录端口 9.微处理器 10.5 V电压转±15 V电压电路 11.开关 12.电源
2.2 软件滤波方法
针对自动移栽机在田间作业时,硬件滤波无法保证完全滤除移栽机自身振动及外界复杂环境引起的振动噪声,进一步采用卡尔曼滤波器对夹持力信号进行软件滤波。基本思想为:以最小协方差为最优估计准则,采用夹持力信号与振动噪声的状态空间模型,利用前一时刻的最优估计夹持力和当前时刻的测量夹持力来更新对状态变量的估计,包括预测夹持力的协方差和卡尔曼增益等,并求出当前时刻的最优估计夹持力。根据建立的状态方程和观测方程对需要处理的夹持力信号做出满足最小协方差的估计,即是对夹持力信号进行滤波处理过程[24-26]。
3 试验与结果分析
3.1 标定系统构建与试验
标定系统主要由9部分组成,包括函数信号发生器、功率放大器、激振器、夹持力检测传感器、石英动态力传感器、数据采集卡、信号调理电路、无线通信模块、计算机,标定系统构成如图10所示。
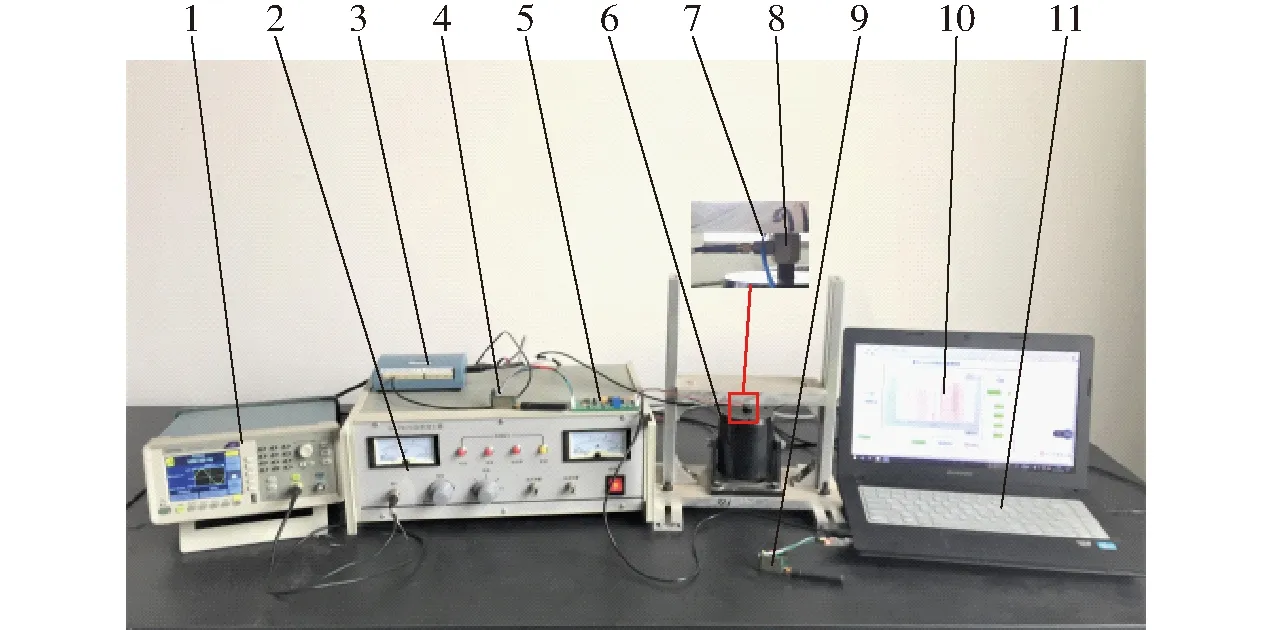
图10 标定系统构成Fig.10 Calibration system constitution1.函数信号发生器 2.功率放大器 3.数据采集卡 4、9.无线通信模块 5.信号调理电路 6.激振器 7.夹持力检测传感器 8.石英动态力传感器 10.信号采集软件系统 11.计算机
函数信号发生器产生正弦输入信号,经功率放大器放大并使其具有带负载的能力,对激振器进行驱动控制,激振器接收放大的激励信号,并与激励信号同频振动,然后将力加载于夹持力检测传感器,固定在激振台上的石英动态力传感器测量激振器输出的力,并输入数据采集卡,由数据采集卡传输到信号采集软件系统;同时,信号调理电路将夹持力检测传感器受机械力后输出的电荷电压信号转换、放大和滤波,经无线通信模块将夹持力信号发送到计算机串口,并输入信号采集软件系统,然后通过信号采集软件系统记录的压力信号和电压信号,实现夹持力检测传感器的标定。
函数信号发生器采用上海广信友达实业有限公司生产的AFG1022任意函数发生器;功率放大器采用无锡世熬科技有限公司生产的SA-PA010型功率放大器;激振器采用无锡世熬科技有限公司生产的SA-JZ002型电动式激振器,最大激振力为20 N,最大行程为6 mm;石英动态力传感器采用扬州英迈克测控技术有限公司生产的502F01型动态力传感器,灵敏度为20.29 mV/N,测量范围为0~200 N;数据采集卡采用上海澄科电子科技有限公司生产的MCC USB-1608G型数据采集卡。
夹持力检测传感器的标定试验于2018年7月12—20日进行。分别设置函数信号发生器频率为0.5、1.0、1.5 Hz,代表自动移栽机栽植频率分别设定为30、60、90株/min,通过逐渐增大功率放大器的功率以增大夹持力检测传感器表面压力,使用石英动态力传感器测量该压力,并通过数据采集卡读取记录,各频率采集20组数据,共采集60组数据。采用最小二乘法拟合得到夹持力检测传感器标定曲线如图11所示,夹持力检测传感器所受的压力与输出电压的线性决定系数分别为0.991 9、0.991 3、0.990 9,平均线性决定系数为0.991 4,可以看出,夹持力检测传感器所受压力与输出电压呈现高度的线性关系。
3.2 夹持力检测传感器性能测试
(1)夹持力检测传感器的测量范围
夹持力检测传感器的测量范围包括输出电压测量范围和压力测量范围。夹持力检测传感器的输出电压测量范围为0~5 V,压力测量范围为0~5 N。
(2)夹持力检测传感器的灵敏度
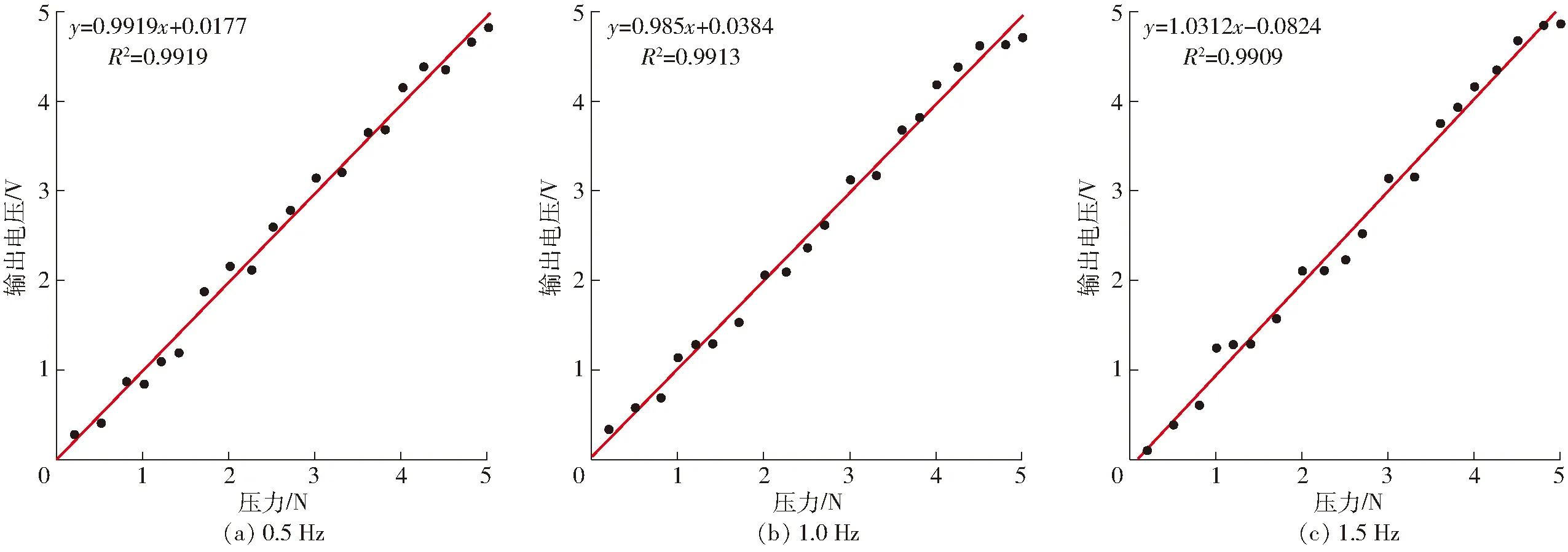
图11 夹持力检测传感器标定曲线Fig.11 Calibration curves of clamping force detection sensor
夹持力检测传感器的灵敏度表示传感器输出电压的变化Δy与引起输出电压变化的压力变化Δx之比。其计算公式为
(7)
运用式(7)求得夹持力检测传感器在频率为0.5、1.0、1.5 Hz时的灵敏度分别为0.991 9、0.985 0、1.031 2,平均灵敏度为1.002 7。
(3)夹持力检测传感器的精度
夹持力检测传感器的精度表示测量结果的可靠程度,即测量范围内的最大绝对误差与满量程的百分比。其表达式为
(8)
式中 ΔA——测量范围内的最大绝对误差
YFS——满量程夹持力
夹持力检测传感器在频率为0.5、1.0、1.5 Hz时的最大绝对误差分别为0.206 4、0.243 3、0.301 2 V,夹持力检测传感器的满量程为5 V,通过式(8)计算出传感器精度分别为4.128%、4.866%、6.024%,则夹持力检测传感器的精度为6.024%。
3.3 室内验证试验
为了验证夹持力检测传感器的可靠性,于2018年8月1—10日在实验室进行验证试验,试验中以辣椒穴盘苗为作业对象,试验现场如图12所示。
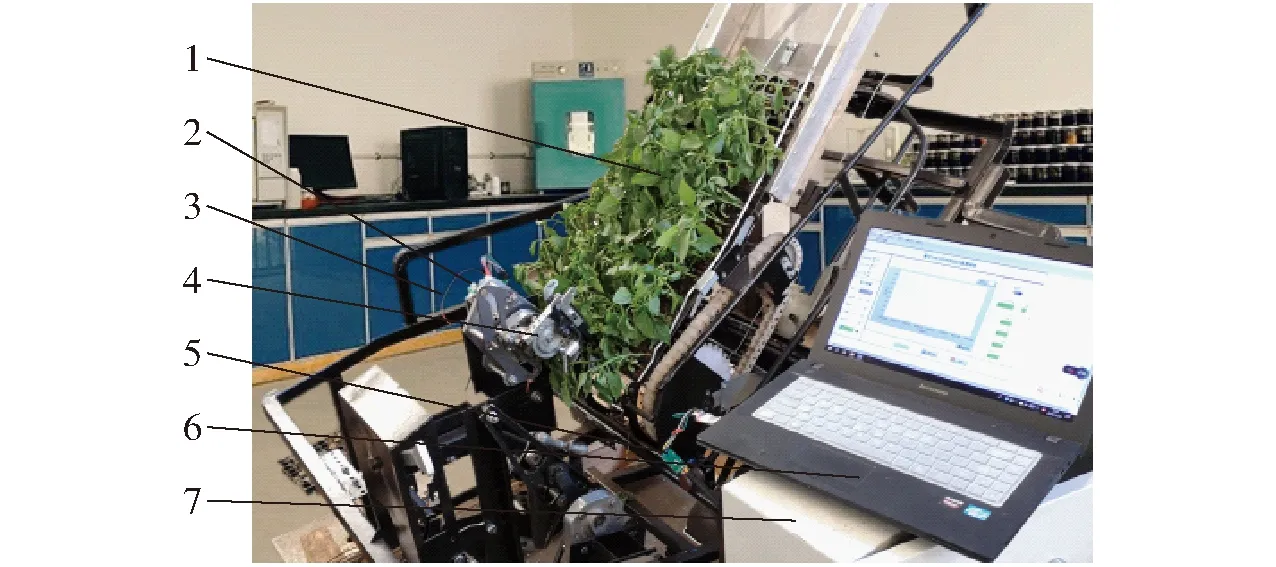
图12 试验现场Fig.12 Testing site1.辣椒穴盘苗 2.信号调理电路 3.夹持力检测传感器 4.取苗机构 5.无线通信模块 6.计算机 7.自动移栽机控制箱
3.3.1试验对象与试验设备
试验对象为辣椒穴盘苗。育苗盘是128穴倒方锥形苗盘,穴格深度为41.5 mm,穴格间距为36.5 mm,穴口尺寸为30.5 mm×30.5 mm,穴底尺寸为15 mm×15 mm,穴格容积约21 mL;育苗基质主要是珍珠岩、泥炭、蛭石,体积比为2∶1∶1,基质含水率约为55%。
试验设备为穴盘苗自动取苗夹持检测试验台。
3.3.2试验指标
选择单株穴盘苗取投过程中最大的夹持力为每株穴盘苗夹持力测量值,以夹持力测量值的均值、标准差、最大值为指标,分析夹持力检测传感器的工作稳定性。
3.3.3试验方法
通过PLC编程控制移栽机栽植频率为单行60株/min,共进行24组试验,每组栽植50株穴盘苗,通过LabVIEW上位机软件记录试验数据并按照试验指标进行分类统计。经多次测试对比分析,设置卡尔曼滤波器参数为:噪声驱动矩阵和测量矩阵为1,输入白噪声的协方差和测量噪声协方差为0.25。
3.3.4试验结果
记录每株穴盘苗的夹持力测量值,并将24组试验中夹持力测量值的均值、标准差、最大值采用箱形图统计,如图13所示,24组试验夹持力测量值的均值在2.31~2.63 N之间,每组夹持力测量值的标准差均小于0.076 N,夹持力测量值的最大值范围为2.40~2.67 N,表明单株穴盘苗夹持力测量值的波动范围较小,夹持力检测传感器具有较好的工作稳定性,适用于监测移栽作业过程中的夹持力信号。
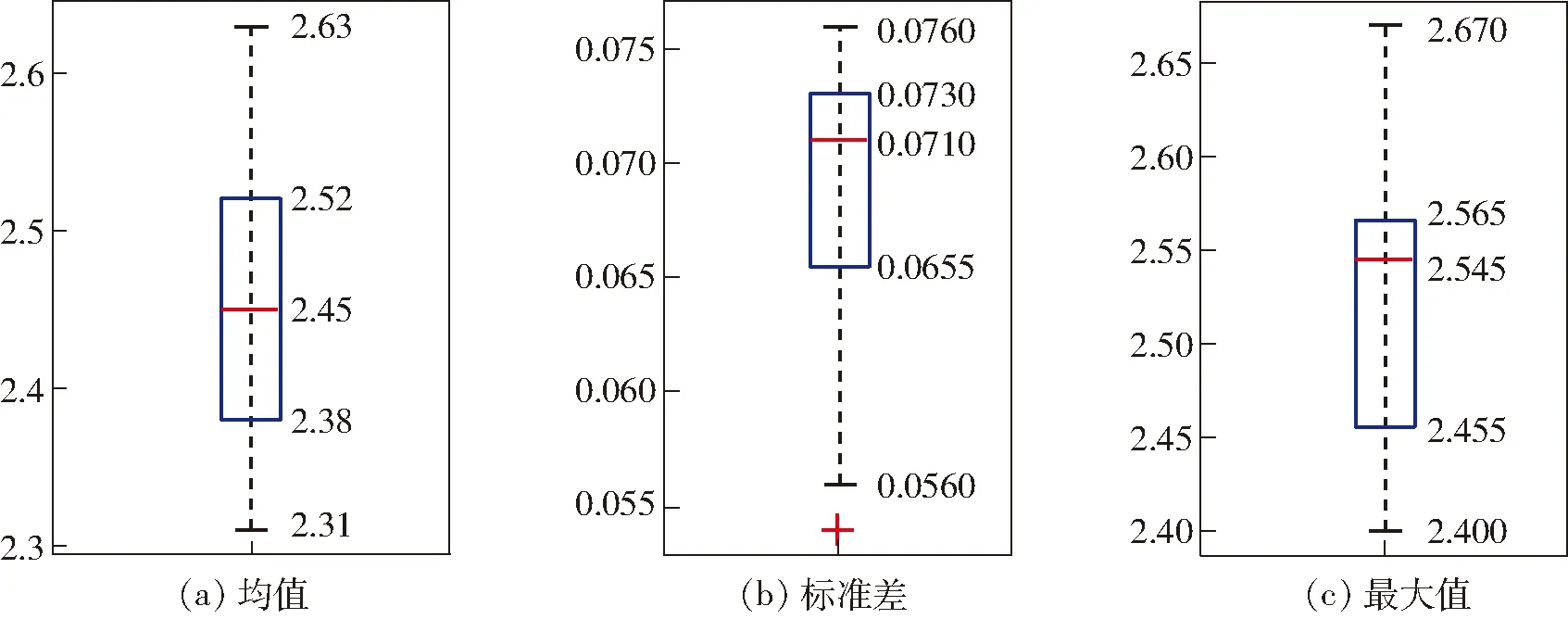
图13 夹持力测量值的均值、标准差、最大值的箱形图Fig.13 Box diagrams of mean value, standard deviation and maximum value of holding force measurement value
从试验中选取3 s数据的波形如图14所示,取苗爪插入钵体过程中(AB阶段),钵体对夹持力检测传感器的压力较小,夹持力测量值较小;BC阶段,取苗爪夹取穴盘苗,夹持力测量值逐渐增大,在C点处,钵体克服最大粘附力,夹持力测量值达最大值,约为2.56 N;CD阶段,钵体与穴盘逐渐分离,夹持力测量值逐渐减小;DE阶段,夹持力测量值基本恒定,此过程仅克服钵体重力。分析可知,夹持力检测传感器的输出电压与取、投苗过程中夹持力的变化规律一致。
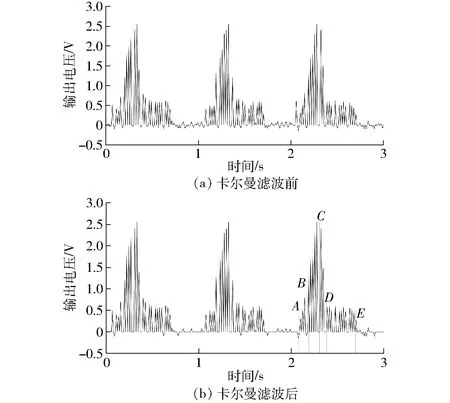
图14 夹持力信号输出电压波形图Fig.14 Output voltage waveform of clamping force signal
4 结论
(1)设计了苗钵夹持力检测系统,该系统集成PVDF压电薄膜、信号调理电路、无线通信模块、信号采集软件系统,能够对苗钵夹持力信号进行采集、放大、滤波、存储及显示。
(2)设计了信号调理电路,用于对苗钵夹持力电荷信号进行信号转换、放大、工频信号滤除以及振动噪声削弱;通过卡尔曼滤波器能够对苗钵夹持力信号进行软件滤波,有效降低了移栽机自身振动与地面激励产生的振动噪声对夹持力信号的影响。
(3)标定试验结果表明,设计的夹持力检测传感器平均线性决定系数为0.991 4,平均灵敏度为1.002 7,精度为6.024%,满足移栽作业过程中夹持力测量准确性的要求;室内验证试验结果表明,夹持力测量值的均值、最大值波动范围小,夹持力检测传感器的输出电压值与室内验证试验夹持力的变化规律一致,表明夹持力检测系统具有较好的稳定性和一致性。该夹持力检测系统测量准确性高、灵敏性好,可为夹持力可调式自动移栽苗钵受力检测提供参考。
猜你喜欢
仪表技术与传感器(2022年4期)2022-05-31
初中生学习指导·中考版(2022年4期)2022-05-12
陶瓷学报(2021年5期)2021-11-22
中南民族大学学报(自然科学版)(2021年5期)2021-10-22
陶瓷学报(2021年4期)2021-10-14
陶瓷学报(2021年3期)2021-07-22
陶瓷学报(2020年6期)2021-01-26
表面工程与再制造(2019年3期)2019-09-18
电子制作(2019年24期)2019-02-23
电子制作(2018年17期)2018-09-28
