
可移动自动售货机设计及其关键实现技术研究
2019-06-01 03:50韩昌幸申龙章邱长军吴晓艳
制造业自动化 2019年5期
韩昌幸,申龙章,邱长军,吴晓艳,李 琦
(南华大学 机械工程学院,衡阳 421001)
0 引言
随着网络技术的发展,网络购物已经成为人们的第二大购物体验。而对于用户来讲,自动售货机既具备传统实体店的即视选择优点,又由于其分布零散、范围广阔、支付方便等特点可与网店购物媲美,而在全世界范围内得到了广泛应用[1]。
随着自动售货机的普及,人们对其体验水平也势必与日俱增。尤其随着网络的普及,人们越来越倾向于伸手即得的购物体验。自动售货机通常置于人流量较大的地方,然而一方面由于所能设置的售货机数量有限,另一方面遇到下雨或是炎热天气,即使是几米开外也不够方便[2]。
本文所设计的自动售货机具备移动功能,人们可以通过智能手机APP查找附近的可移动自动售货机分布情况,并可浏览机器内部货品信息,选择好所需要的自动售货机,而它就能在网络导航下,自动运动到需要的人面前。虽然本文所做的工作是初步的,离自动售货机的可移动应用还有很遥远的距离,但从技术的储备和学生相关能力的锻炼方面来看[3],具有一定的价值和意义。
1 可移动自动售货机的原理及实现
可移动自动售货机主要是在现有自动售货机技术基础上,增加其移动功能。如图1所示,人们在智能手机中使用售货机专用APP,可查看地图上附近的售货机信息。当其通过浏览APP上售货机内部货品信息情况后,选择自己需要的售货机并下单,则当前售货机响应,并自行运行到需要的人面前。

图1 可移动自动售货机图解
而自动售货机无线联通系统由用户端、自动售货机、无线路由器中继和远程监控管理平台四部分组成。其中,自动售货机由人机交互部分、支付部分、货架控制等部分组成,人们可以在任何时间选购自己所需的商品。通过无线中继为自动售货机建立高速、稳定的数据传输通道,将所有商品销售等信息传输到企业后台,供运营企业进行业务分析和操作。远程监控管理系统将完成售货机的计费、货品管理和运动导航控制,如图2所示。
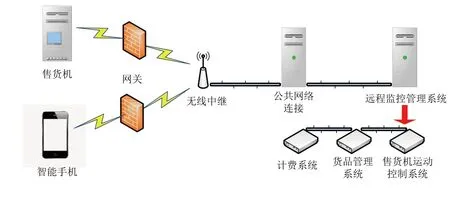
图2 可移动自动售货机网络结构图
2 移动售货机的无线定位及路径规划研究
为了实现售货机的无线定位,就首先要对售货机内置的发射机与无线接收机之间的天线高度和分离距离两个主要参数进行评估。WiFi使用5dBi增益的Alfa AIPW525H双天线,这种类型的天线具有很好的穿墙性能。所使用的接收机是一种通用的Broadcom BCM43142无线网络适配器。通过设置好的WiFi AP,使用Alfa Inc.的设备建立一个默认MAC网络,网络通道设置为1,通讯频率设置为2.4GHz。由于所需要的数据只是从特定AP传输信号的强度,因此不需要访问internet,因此网络仍然与它断开连接。最后,在Homedale®开放源代码下运行Windows 8.1无线信号强度无线监测,每间隔2秒时间记录一次数据。为了精确定位售货机位置,售货机与天线位置要满足下图关系[4]。
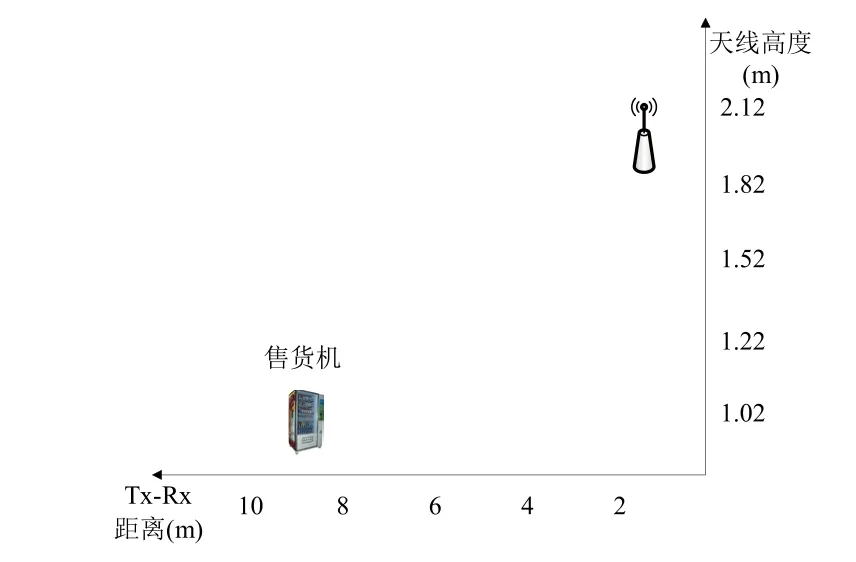
图3 售货机与天线位置
而售货机可通过式(1)~式(3)完成坐标计算,实现定位。

因为神经网络高度的并行分布计算、具有良好非线性拟合能力的特点,可移动自动售货机采用神经网络结构作为路径规范算法可使售货机运行在未知环境信息的情况下具有良好的适用性[5,6]。
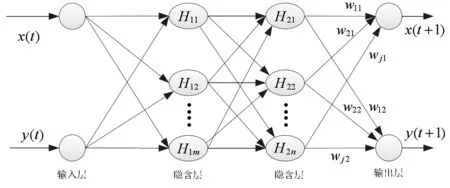
图4 基于神经网络的路径规划
如图4所示,路径规划时,移动售货机本体携带的传感器实时检测周围的障碍物分布情况,结合当前位置的输入值,网络及时调整第二隐层权值参数,因此wj1,wj2是动态变化的。它们的值每迭代一次后结果都可能不一校。通过连接权值的实时调整,下一时刻的路径节点位置信息通过网络计算输出,售货机则用刚输出的节点信息作为自己的当前位置信息,再进行下一步的规划,如此往复,直至到达目标点为止[7,8]。
路径规划主要目的可以分为两个子目标,一是避开障碍物,另一个就是要求路径尽可能短。因此可以设计两个能量函数来描述这两方面的物理意义,分别是目标能量函数Eg和障碍物能量函数Eo。最终就可以将路径规划问题转化成带有约束条件的优化问题,通过寻找能量函数的极值点来解决路径规划问题[9~11]。
首先对障碍物和售货机都退化成质点。在没有障碍物的情况下最优路径就是给定起始位置与目标位置之间的直线连线。由于障碍物的约束,实际上是要求售货机每一步的位置集合距离目标点尽可能的小。而目标能量函数Eg和障碍物能量函数Eo可以通过式(4)~式(6)来表示。

其中(xg,yg)为目标位置坐标,(xR(t+1),yR(t+1))为售货机t+1时刻坐标,N表示售货机移动的步数, M为传感器探测到的碰撞障碍物个数,A为常数项。因此式(6)的最后一项的物理意义是:当售货机与障碍物相碰时,在障碍物能量函数上加一个惩罚函数,惩罚越大,则表明碰撞的障碍物越多。为了验证算法的可行性,本文在 MATLAB R2013a环境下进行了算法仿真实验。路径规划仿真结果如图5所示。

图5 路径规划仿真图
3 结论
1)提出了可移动自动售货机的概念和原理结构设计,在成本并未增加很高的基础上,极大程度的提高了人们的购物体验,提高自动售货机的市场竞争力;
2)可移动自动售货机在现有技术基础上,目前存在的主要问题是如何实现无线定位和路径规划上,本文通过WiFi监测信号计算获取定位坐标,采用神经网络算法实现售货机运行路径规划,可初步解决这一问题。
猜你喜欢
现代电力(2022年2期)2022-05-23
无线互联科技(2021年4期)2021-04-21
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
电子制作(2019年19期)2019-11-23
创新作文(1-2年级)(2019年4期)2019-10-15
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2019年24期)2019-02-23
电子制作(2018年23期)2018-12-26
电子制作(2018年19期)2018-11-14
