低附着系数路面车道保持模型预测控制及汽车稳定性控制
2019-05-31 02:10汪选要叶友东
中国机械工程 2019年9期
汪选要 程 义 程 煜 叶友东,2
1.安徽理工大学机械工程学院,淮南,232001 2.安徽理工大学矿山智能装备与技术安徽省重点实验室,淮南,232001 3.安徽理工大学深部煤矿采动响应与灾害防控国家重点实验室,淮南,232001
0 引言
交通拥堵是当前各个城市面临的难题,开发自动驾驶汽车被认为是解决这一难题的有效途径之一。国内外学者在自动驾驶汽车纵横向控制策略方面取得了很多研究成果[1]。李琳辉等[2]基于视觉预瞄距离建立了横向车路模型,将车辆当前的横向位移偏差和方向偏差作为滑模切换函数的参数来设计滑模面,实现了车辆的自动转向控制;汪选要等[3]基于道路误差动力学模型设计了车道横向切换转向控制器;王立标等[4]设计了一种自适应神经网络控制器,通过直接横摆力矩和前轮主动转向的复合控制来提高车辆横向稳定性;王家恩等[5-6]在车辆当前行驶位置和道路预瞄点之间实时规划逼近目标路径的虚拟路径,采用单点预瞄最优曲率模型设计了侧向加速度PD跟踪控制器,并基于七自由度非线性车辆动力学模型设计了滑模控制器以跟踪期望横摆角速度,从而实现车辆横向控制;CHOU等[7]根据非线性车辆模型设计了汽车底盘控制器,但该控制器不能直接跟踪车辆期望路径;CERONE等[8]提出了一个新型驾驶员模型,该模型能够实现汽车车道保持和主动避障功能;MARINO等[9]设计了一个二阶解耦转向控制器,可实现汽车车道保持功能;ENACHE等[10]提出一种转向力矩闭环控制模式来实现汽车自动转向控制。
车辆动力学模型具有非线性、不确定性和时变的特点。上述研究中,车道保持转向控制器的设计较少考虑车辆模型参数的变化,不易获得理想的控制效果,而模型预测控制算法不依赖于精确的模型[11],可用于车道保持转向控制器的设计。
汽车电子稳定控制(electronic stability control,ESC)系统的控制算法主要包括PID 控制、模糊控制、滑模控制和最优控制等算法[12-16],这些控制算法依赖于精确的车辆动力学模型参数,而在低附着系数路面,汽车轮胎力极易饱和,不易获得精确的模型参数,因此,不依赖于精确模型参数的汽车稳定性控制算法有待进一步研究。
本文建立了跟踪路径车路模型,设计了低附着系数路面车道保持模型预测转向控制器和汽车稳定性模糊控制器,并基于CarSim/Simulink仿真验证了所设计的控制器具有较好的车道保持能力和稳定性。
1 车路模型
经典的二自由度车辆动力学模型用状态方程表示如下:
(1)

式中,vy(t)为车辆质心处侧向速度;r(t)为横摆角速度;δ(t)为前轮转向角;Caf、Car分别为前后轮胎的侧偏刚度;m为整车质量;vx为车辆质心处的纵向速度;lf、lr分别为车辆质心到前后轴的距离;Iz为车辆横摆转动惯量。
车辆质心处侧偏角可表示为
β(t)=arctan(vy(t)/vx)
(2)
在地面坐标系中,车辆质心处速度可表示为
(3)

(4)
车道保持工况下车辆横摆角ψ(t)较小,式(3)可近似表示为
(5)
(6)

图1 车-路坐标系Fig.1 The coordinate system of vehicle-road
因此,由式(4)和式(6)可得跟踪路径车路模型的状态方程:

(7)
式中,y(t)为路径坐标系车辆横向位移。
2 模型预测转向控制器设计
将连续状态方程(式(7))转换为离散状态方程如下[11]:
x(k+1)=Ax(k)+Bδ(k)
(8)
其中,状态向量x(k)=(vy(k),r(k),y(k),ψ(k))T,若定义y(k)和ψ(k)为系统被调输出,则
z(k)=Cx(k)
(9)

通过式(8)迭代,可以预测第k+2采样时刻的状态向量:
x(k+2)=Ax(k+1)+Bδ(k+1)
x(k+2)=A2x(k)+ABδ(k)+Bδ(k+1)
令预瞄点个数为Np,通过不断迭代,能够获得k+Np时刻的状态向量x(k+Np),从而获得以下状态方程:
(10)
令Nu为控制时域,则Nu(Nu≤Np)以后的控制输入为常值,即
δ(k+Nu-1)=δ(k+Nu)=…=δ(k+Np-1)
(11)
则式(10)可改写为
(12)
可得系统预测输出z(k+i)为
(13)
由式(12)和式(13)可得
Z(k)=Ψx(k)+ΘU(k)
(14)
定义跟踪期望路径的横向位移和横摆角以及转向角加权的目标函数为

(15)
r(k+i)=[y(k+i)ψ(k+i)]T
其中,r(k+i)为第k+i采样时刻的预瞄值,Q为权重矩阵,R为权重系数,令其为固定值,式(15)可改写为
(16)
T(k)=[r(k+1)r(k+2) …r(k+Np)]T
Q=diag(Q(1),Q(2),…,Q(Np))
R=diag(R(1),R(2),…,R(Np))
令预瞄时域长度的预测误差为ε(k)=T(k)-Ψx(k),则V(k)改写为
(17)

(18)
当U(k)为最优解时,目标函数V(k)最小。因此,最优解满足下式:
(19)
一系列控制时域长度的车道保持最优转向角可表示为
Uopt(k)=Kε(k)
(20)
通过滚动优化控制策略,令Uopt(k)第一个值δopt(k)为车道保持转向角输入,计算获得Uopt(k+1),且使用其第一个值δopt(k+1)作为车道保持转向角输入,那么车道保持最优转向角为
δopt(k)=K(1,:)ε(k)
(21)
式(21)中,K(1,:)表示矩阵K的第一行,令Kω=K(1,:),则
δopt(k)=Kω(T(k)-Ψx(k))
(22)
因此,预测转向控制器可改写为
δopt(k)=Kpxyψ(k)
(23)
Kp=[-KωΨKω]
xyψ(k)=[x(k)T(k)]T
式中,Kp为时不变增益向量,Kp∈R4+2Np。
MATLAB软件的mpctool工具箱仿真环境中,令系统输入约束-20°≤δ≤20°,采样周期T=0.01 s,Np=50,Nu=20,权重R=0,Q=diag(1,0.1)。
3 汽车稳定性控制
通过MATLAB仿真获得转向角、侧向加速度和横摆角速度等可测信号与汽车稳定性的关系,在低附着系数路面上仿真双移线工况(double land condition,DLC),确定汽车稳定性模糊控制规则,设计汽车稳定性模糊控制器,通过差动制动实现汽车稳定性控制。
3.1 转向角

(a)转向角和侧向加速度

(b)质心侧偏角图2 严重失稳汽车转向反应Fig.2 Steering reaction for seriously unstable vehicle
在CarSim软件中设定汽车双移线实验工况的仿真参数,车辆模型为C-Class/Hatchback,路面附着系数μ=0.5,车速vx=95 km/h,并设定驾驶员模型参数。汽车转向盘转向角δsw和侧向加速度ay如图2a所示,汽车质心侧偏角β如图2b所示。分别以3.5 Hz和0.5 Hz频率对转向角原始数据进行低通滤波,结果如图3a所示。转向角两次低通滤波的差值Δδsw表示驾驶员对失稳汽车的响应[17],如图3b所示。转向角差值Δδsw可作为汽车过多转向的失稳指标。

(a)低通滤波

(b)转向角差值图3 转向角特征Fig.3 The characteristic of steering wheel angle
3.2 侧向加速度
由图2a可得,随着驾驶员的快速转向纠正,侧向加速度ay发生了突变。分别以3.5 Hz和0.5 Hz频率对侧向加速度ay进行两次低通滤波,结果如图4a所示,两次低通滤波的差值Δay如图4b所示。在t=3.5 s时,差值Δay较大,而此时汽车质心侧偏角β也出现了峰值,因此,Δay可以作为汽车失稳指标。
上述分析表明,Δδsw、Δay均可作为汽车失稳指标。当Δδsw和Δay的值均较大时,此时质心侧偏角β也较大,因此,获得了汽车稳定性模糊控制算法的理论依据。
3.3 横摆角速度
当汽车的横摆角速度太大时,汽车将发生“自旋”,横摆角速度直接反映了汽车是否处于稳定状态,因此,横摆角速度可作为汽车失稳指标。分别设计Δδsw、Δay和r的隶属度函数,转向角两次滤波差值Δδsw的隶属度函数如图5所示,侧向加速度两次滤波差值Δay的隶属度函数如图6所示,而横摆角速度r的隶属函数如图7所示。
Δδsw、Δay和r为汽车稳定性模糊控制器的输入,模糊控制器的输出为过多转向稳定性指标,用来确定汽车瞬时失稳程度,其隶属度函数如图8所示。其中,Δδsw的基本论域为[0,50](°),Δay的基本论域为[0,0.5]g,r的基本论域为[0,50](°)/s,稳定性系数的基本论域为[0,10]。Δδsw、Δay和r的模糊子集均为{S,M,L},模糊控制器输出(稳定性系数)的模糊子集为{N, M, H}。模糊控制规则为:如果Δδsw是S,且ay是S,那么稳定性系数是NS;如果Δδsw是S,且ay是S,那么稳定性系数是NS;如果Δδsw是M,且ay是M,那么稳定性系数是MS;如果Δδsw是L,且ay是L,那么稳定性系数是HS;如果r是S,那么稳定性系数是NS;如果r是M,那么稳定性系数是MS;如果r是L那么稳定性系数是HS。

(a)低通滤波
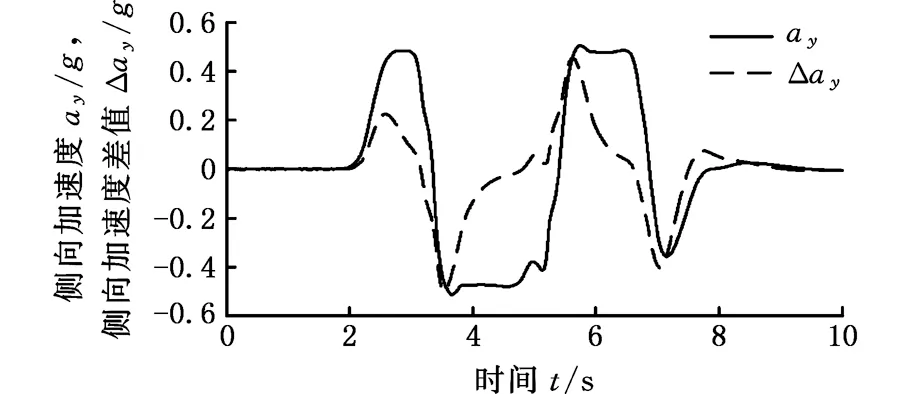
(b)侧向加速度差值图4 侧向加速度特征Fig.4 The characteristic of lateral acceleration

图5 转向角差值隶属度Fig.5 The difference of steering wheel angle for membership

图6 侧向加速度差值隶属度Fig.6 The difference of lateral acceleration for membership
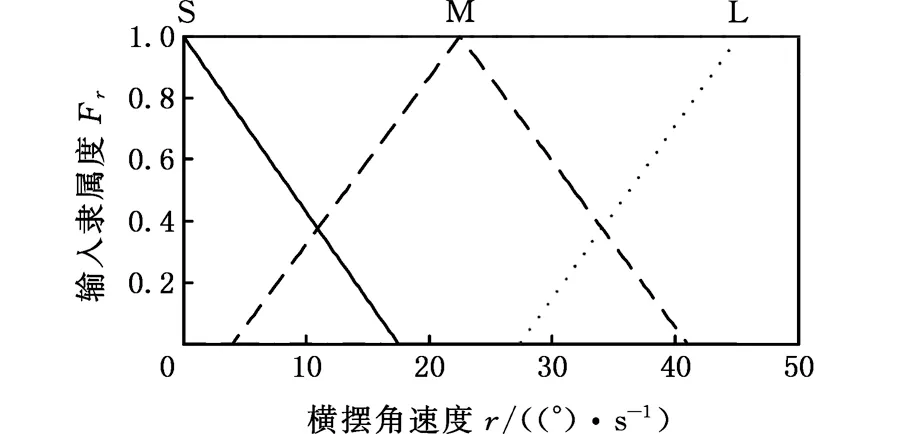
图7 横摆角速度隶属度Fig.7 Yaw rate for membership

图8 稳定性指标隶属度Fig.8 Coefficient of stability for membership
3.4 不稳定指标模糊控制器

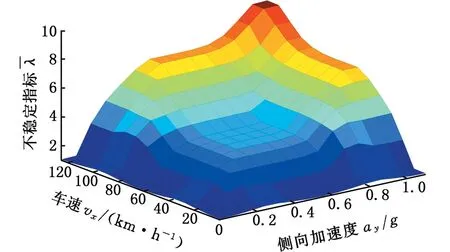
图9 输入/输出特性Fig.9 Input/Output characteristic

图10 稳定性系数Fig.10 Coefficient of stability
仿真采用的车辆模型为C-Class/Hatchback,设定汽车制动系统前制动器输出的制动力矩Tb,ij与制动压力pb,ij(ij=fl,fr分别表示前左前右车轮)的比值为300 N·m/MPa,后制动器的制动力矩Tb,IJ与制动压力Pb,IJ(IJ=rl,rr分别表示后左后右车轮)的比值为200 N·m/MPa,并设定制定器输出压力的上限值为12 MPa。
4 汽车稳定性系数保持器
汽车在低附着系数路面紧急变线时,可能会导致汽车失去稳定性,但由于驾驶员快速转向会导致稳定指标急速减小,不能保证稳定性模糊控制器持续工作,从而影响汽车稳定性控制效果且当汽车严重失稳时,车速和侧向加速度会减小,也会出现稳定性指标λ减小的现象,因此,需要设计稳定性系数保持器,确保对汽车施加连续控制。保持器工作的逻辑框图见图11,其中,Thold为保持时间。

图11 保持器的逻辑框图Fig.11 Logic diagram of the retainer
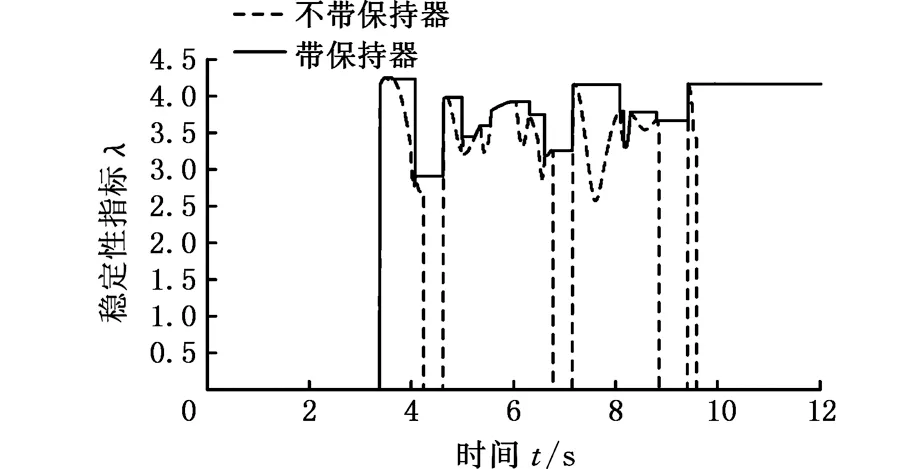
图12 稳定性指标(DLC实验)Fig.12 Index of stability(DLC experiment)
C-Class/Hatchback模型分别以带保持器和不带保持器的模糊稳定性控制器进行DLC实验(vx=72 km/h,μ=0.35),稳定性指标如图12所示,质心侧偏角如图13所示。仿真结果表明稳定性指标保持器使得汽车质心侧偏角的绝对值均值减小了35%,方差减小了67%,最大值分别减小了55%,采用所设计的保持器提高了汽车稳定性。
为了验证所设计的控制器的鲁棒性,车辆模型采用E-Class/SUV,仿真车速vx=72 km/h,路面附着系数μ=0.35。 设定汽车制动系统前制动器输出的制动力矩与制动压力的比值为350 N·m/MPa,制动系统后制动器的制动力矩与制动压力的比值为150 N·m/MPa。所设计的汽车稳定性模糊控制器在图14中以“模糊ESC”表示,汽车原装的稳定性控制器在图14中以“CarSim ESC”表示,通过DLC对比二者的稳定性控制性能。质心侧偏角如图14所示,汽车原装的稳定控制器制动压力如图15a所示,采用所设计的汽车稳定性模糊控制器的制动压力如图15b所示。仿真结果表明采用汽车原装的稳定控制器质心侧偏角最大值达到了31°,制动压力出现长时间饱和,汽车已经严重失稳;而采用本文所设计的汽车稳定性模糊控制器质心侧偏角最大值仅为2.59°,汽车稳定性处于可控的范围。

图14 不同控制器下的质心侧偏角曲线Fig.14 The side slip angle curves in different controllers
5 低附着系数路面车道保持性能
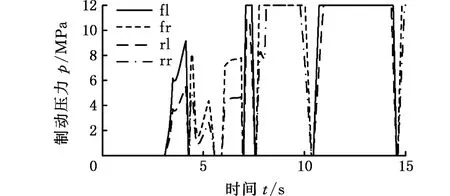
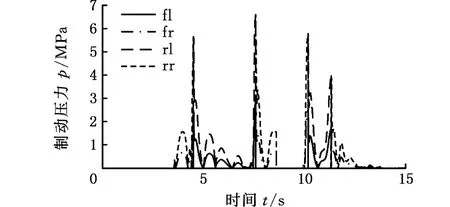
仿真的车辆模型为C-Class/Hatchback,道路模型为Alt3 from FHWA(vx=94 km/h,μ=0.35),采用所设计的模型预测转向控制器实现车道保持横向控制,在低附着系数路面上对比有无汽车稳定性模糊控制器情况下的车道保持性能,相应结果见图6。图中分别以“MPC+模糊ESC”、“MPC”表示有无汽车稳定性模糊控制器工况。MPC(modeling predictive control)指模型预测控制。车道保持汽车横向偏离量ey的曲线如图16所示,质心侧偏角β的曲线如图17所示,ey和β的绝对值均值、方差与最大值如表1所示,制动压力如图18所示,稳定性指标如图19所示。仿真结果表明“MPC+模糊ESC”车道保持能力较优。
(a)CarSim ESC
(b)模糊ESC图15 不同控制器下的制动压力曲线Fig.15 The braking pressure curves in different controllers

图16 有无汽车稳定性控制器下横向偏移量曲线Fig.16 The lateral deviation curves with/without car stability controller
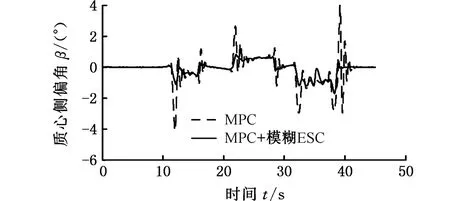
图17 有无汽车稳定性控制器下质心侧偏角曲线Fig.17 The side slip angle curves with/without car stability controller

MPCMPC+模糊ESC横向偏移量ey(m)均值0.050.03方差0.0170.004最大值0.550.33质心侧偏角β(°)均值0.500.29方差0.520.14最大值4.111.70

图18 有无汽车稳定性控制器下制动压力曲线Fig.18 The braking pressure curves with/without car stability controller
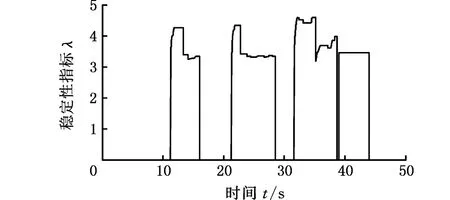
图19 有无汽车稳定性控制器下稳定性指标曲线Fig.19 The stability index curves with/without car stability controller
6 结语
基于跟踪路径车路模型设计了车道保持模型预测转向控制器。根据转向角、侧向加速度和横摆角速度等可测信号提出了汽车稳定性模糊控制策略,该模糊控制算法不依赖于车辆模型状态参数的估计。
仿真并验证了不稳定指标模糊控制器的有效性,所设计的保持器能够抑制汽车稳定性系数急速减小。在低附着系数路面上对比了所设计的转向控制器有无模糊ESC控制器在弯道上的车道保持能力,结果表明“模型预测转向控制+模糊ESC控制”具有更好的车道保持能力和稳定性。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
军民两用技术与产品(2022年2期)2022-06-01
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年4期)2021-11-24
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
中国惯性技术学报(2019年6期)2019-03-04
物理教学探讨(2018年1期)2018-02-13
汽车文摘(2015年11期)2015-12-02
汽车文摘(2014年10期)2014-12-13