
基于清晰度强调的彩色印刷图像处理研究
2019-05-27 01:18:58袁春雨舒忠
现代计算机 2019年11期
袁春雨,舒忠
(荆楚理工学院,荆门 448000)
0 引言
在图像处理技术应用中,由于图像获取、处理、输出过程不可避免地存在一些制约因素,如:图像获取的成像方式、成像部件的性能、量化编码过程、图像成像外界光源等方面存在的缺陷、数字图像处理的方法运用、图像输出方式、输出设备性能等诸多因素,都可能造成图像信息的丢失或变化(主要指不利变化),从而影响图像的清晰度。
图像锐化技术方法实现主要包括有参数控制法和无参数控制法两种[1]。
在基于像素特征的有参数控制法应用中,主要应用的理论包括:核回归函数算法、去抖算法(主要应用于相机的拍摄)、点扩散函数(图像边缘锐化)和目前常用的全变分、基于图像稀疏性描述的图像先验算法[2-5]。目前的有参数控制法采用高频滤波与去噪结合,采用局部控制方式处理图像,因此,还是会出现“漏网之鱼”,去噪效果不完整,且运算量也比较大。
无参数控制法是针对像素特征完成模糊像素进行修复的锐化算法,分为一阶微分锐化算法(Roberts算子、Prewitt算子、Sobel算子等)、二阶微分锐化算法(Laplacian算子、log算子、双阈值Canny算子等)两类,后续还出现了一二阶混合锐化算法(一阶采用乘法运算和二阶采用加法运算相结合的锐化算法)和统计锐化算法(沃利斯统计差分锐化算法)等[6-8]。其中,以二阶微分锐化算法为基础的改进算法特别多,如:Photoshop的USM锐化算法、自适应双边滤波锐化算法、几何局部自适应锐化算法,等等。
1 印前图像锐化算法设计
本文的图像锐化算法主要设计工作包括:①CMYK模式图像的数学描述分析;②设计原理分析及设计流程的制定。
1. 1 CMYK图像的数学描述
CMYK模式图像的信息使用油墨印刷的网点面积率值进行描述,通过四个通道的取值0~100(由亮变暗,单位为%)反映图像的阶调层次变化。
CMYK图像某一个像素点数学表达式为:

其中,

AC、AM、AY、AK分别表示CMYK四色的网点面积率,0≤AC、AM、AY、AK≤100(取整数),x、y用于描述像素矩阵中的横向和纵向坐标值。
由于印刷图像通常只针对静止图像,则一幅静止的、像素为M×N(横向和纵向)的CMYK图像的数学解析式为:

1. 2 设计原理
依据奥布莱恩效应、马赫带效应原理,所设计的图像锐化原理如图1所示。
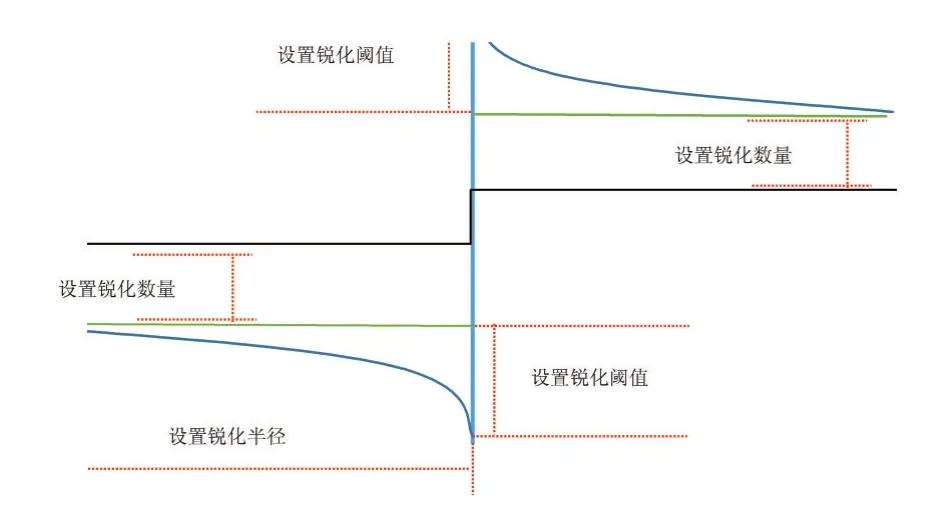
图1 锐化原理示意图
本文设计的锐化只针对图像的高频部分,其高频滤波流程如图2所示。
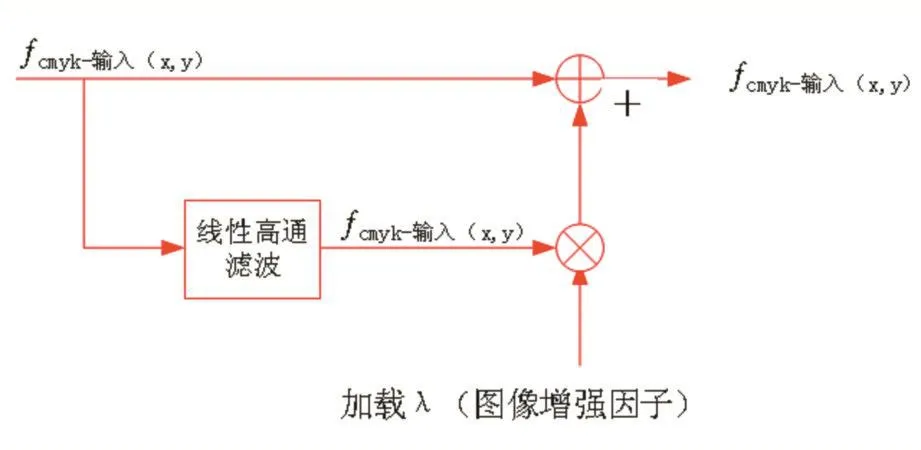
图2 高频滤波流程
锐化实现的算法公式为:

在上式中, fCMYK-输入(x,y)为原 稿图 像 ,fCMYK-高频(x,y)为原稿经过低、中频滤波后得到高频图像,λ为图像增强的缩放因子,用于增强图像边缘像素的范围,fCMYK-输出(x,y)为锐化后图像。
锐化转换模板为:

提取图像高频部分的边缘信息需要使用高通滤波器。其实现过程有两步:一是图像的傅立叶变换,二是建立高通滤波转移函数。图像的傅立叶变换公式为:

图像高通滤波转移函数公式如下:

公式中,fCMYK-高频(i,j)为0时,表示高频通过的图像细节,fCMYK-高频(i,j)为1时,表示高频阻止的图像细节;D0为锐化半径,也就是图像高频部分的信息;DCMYK(i,j)为图像中被检测的全部区域。
本文设计的图像锐化模块主要工作流程为:输入图像→进行傅里叶变换→创建高通滤波器→定义锐化半径→设置锐化阈值→创建图像CMYK四色独立通道→在滤波器分离四色通道→加载锐化增强因子→与原始图像点乘叠加→进行傅里叶逆变换→调用锐化变换模板→图像通道合并→显示、存储结果图像。
1. 3 图像锐化质量评价设计
图像均方误差、峰值信噪比、结构相似度三个参数可以全面、准确地对图像锐化质量进行评价,其中,图像均方误差与峰值信噪比为组合参数。
(1)均方误差与峰值信噪比
均方误差可以简单方便地描述图像的数据信息变化情况,定义:E为均方误差值(为求和平均误差),fCMYK-1(x,y)为原始图像像素的灰度值,fCMYK-2(x,y)为锐化后图像像素的灰度值,M为图像纵向像素个数,N为图像横向像素个数。E值计算公式如下:

(2)峰值信噪比
峰值信噪比是使用最广泛使用的图像锐化质量评价参数,定义:P为峰值信噪比,L1为原始图像像素最亮值,通常取值为255,L2为锐化图像像素最亮值,通常取值也为255。P值计算公式如下:

(3)图像结构相似度
图像结构相似度定义:LCSCMYK(x,y)为图像的整体结构相似值,LCMYK(x,y)为图像亮度相似值,CCMYK(x,y)为图像对比度相似值,SCMYK(x,y)为图像阶调结构分布相似值。
LCMYK(x,y)=,I(x)、I(y)分别为横、纵方向图像像素灰度平均值,α为常数,α=(Kα×Lmax)2,Kα≤1,Lmax=255为图像像素最亮值。
其中,D(x)、D(y)为图像方差,β为常数,β=(Kβ×Lmax)2,Kβ≤1,Lmax=255为图像像素最亮值。
SCMYK(x,y)=,其中,D(x,y)为图像的协方差,D(x)、D(y)分别为图像的方差,γ为常数,

其中,a、b、c分别为LCMYK(x,y)、CCMYK(x,y)、SCMYK(x,y)的控制因子,通常情况下,a=b=c=1。
2 实验及分析
2. 1 实验方案
本文实验方法采用比较法,使用拉普拉斯微分算法、Photoshop图像USM锐化算法和本文设计的锐化算法三种算法对图像进行锐化处理,将图像均方误差、峰值信噪比和结构相似度三个参数作为图像锐化质量评价参数。其实验方案如下:
(1)选择一幅原稿实验图像。

图3 图像原稿
(2)使用MATLAB设计拉普拉斯微分锐化算法程序。
(3)使用MATLAB锐化算法进行锐化并提取边缘轮廓图。
(4)使用MATLAB设计本文提出的印前图像锐化算法。
(5)使用图像锐化质量评价系统完成图像锐化效果的评判。
(6)对获取的图像边缘轮廓图和质量评价参数进行比较分析。
2. 2 数据与分析
实验所需获取的主要数据包括:采用三种方式实现图像锐化后的边缘轮廓图、均方误差E值、峰值信噪比P值和结构相似度LCS值。相关数据如图5和表1所示。
根据实验方案,实验所需获取的主要数据包括:采用三种方式实现图像锐化后的边缘轮廓图、均方误差E值、峰值信噪比P值和结构相似度LCS值,由于实验图像为CMYK模式,因此,将对C、M、Y、K四个分量的相关质量评价参数进行统计分析。相关数据如图4和表1所示。
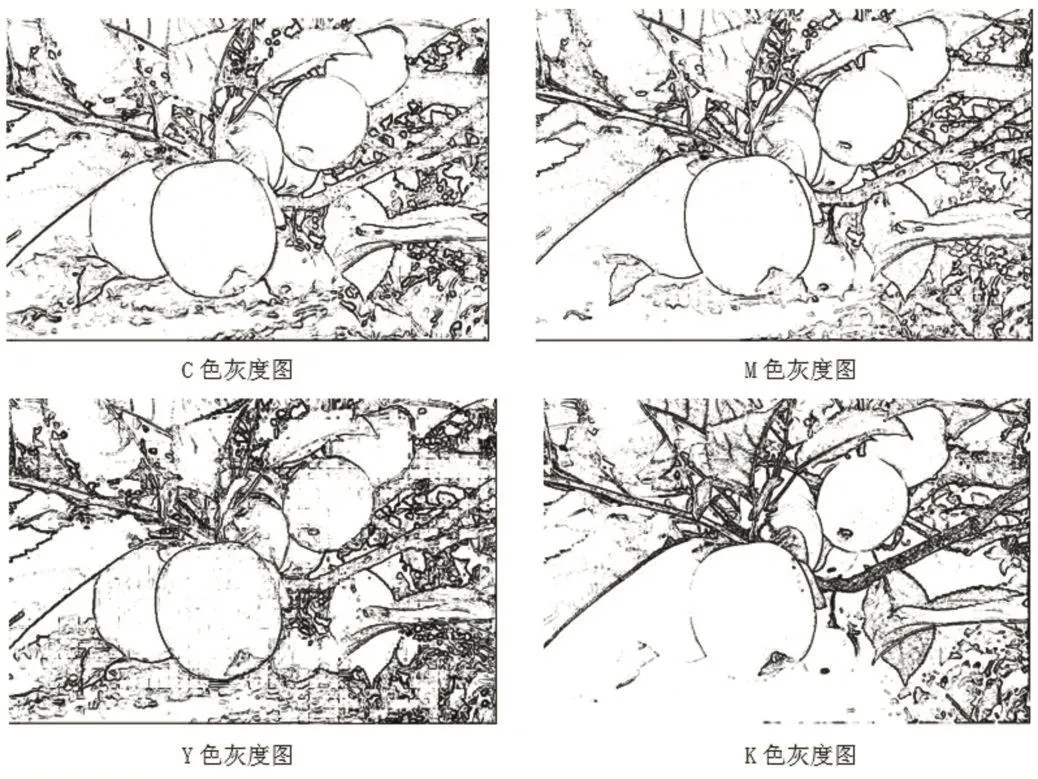
图4 本文锐化算法边缘轮廓图
(1)边缘轮廓分析
灰度图像Lab值中的a值和b值都应为0,只有L值发生变化。在图像中,0≤L≤100,L=0时说明图像对应的像素点有信息,且为最深的黑色,L=100时,说明图像对应的像素点没有信息,也就是白色。边缘轮廓图中组成的全部像素点都满足L=0,则由此像素点组成的线条也最清晰。

表1 三种锐化算法质量评价参数统计表
实验选择的图像在锐化时产生的效果较为明显,其中,拉普拉斯锐化提取到了一些阶调变化复杂区域的边缘轮廓信息,图像中明显的线条边界L值不完全为0,清晰度在三种方法中不是最好的;Photoshop的USM锐化提取到的阶调变化复杂区域的边缘轮廓信息最多,但明显的线条边界L值不完全为0,清晰度和锐化作用范围都比较理想;本文设计的锐化算法提取到了一些阶调变化复杂区域的边缘轮廓信息最少,图像中明显的线条边界L值大多为0,边界线条最清晰,但图像整体清晰度不能说是最好的。
(2)质量评价参数分析
图像锐化质量评价需要对数据进行客观衡量标准比较,其中,E值越小图像锐化效果越好,P值越大图像锐化效果越好,相似度LCS值偏大图像锐化效果越好。本文设计的锐化算法稍好于Photoshop的USM锐化算法,拉普拉斯锐化算法稍差。
3 结语
本文通过对图像增强技术的理论学习,完成了一个以二阶微分图像边缘检测锐化为理论基础的锐化功能模块设计,并应用于了数字图像处理过程中。本文设计的锐化算法可以通过锐化参量的控制,实现对不同原稿和不同印刷要求的需要,提高印刷图像的清晰度。
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17 08:07:30
今日中国·法文版(2020年7期)2020-07-04 02:53:48
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
电子测试(2018年11期)2018-06-26 05:56:02
雷达学报(2017年3期)2018-01-19 02:01:27
通信产业报(2016年44期)2017-03-13 08:41:45
电力建设(2015年2期)2015-07-12 14:15:59
西南石油大学学报(自然科学版)(2015年5期)2015-04-16 05:12:24
深圳大学学报(理工版)(2015年5期)2015-02-28 16:22:08
雕塑(1999年2期)1999-06-28 05:01:42
