基于SSD的道路前方车辆检测
2019-05-24 14:17徐乐刘翔张华
软件导刊 2019年5期
关键词:深度学习
徐乐 刘翔 张华
摘 要:目标检测是计算机视觉领域重要的研究方向,应用于无人驾驶、机器人、行人检测等领域。然而,高检测准确率、鲁棒性等对目标检测方法提出了严苛要求。针对SSD对不同场景下检测准确率较低的问题,提出了一种改进的基于残差网络的SSD目标检测模型,以提升对不同场景的检测精度。对比研究了不同算法在MIT数据集和真实交通场景下的检测能力。实验结果表明,该方法的车辆目标检测准确率为96.72%,耗时短,鲁棒性高,有一定的泛化能力,为未来智能辅助驾驶系统提供了一种全新思路。
关键词:深度学习;SSD;车辆目标检测
DOI:10. 11907/rjdk. 182396
中图分类号:TP306 文献标识码:A 文章编号:1672-7800(2019)005-0027-04
Absrtact: Target detection has become an important research direction and research hotspot in the field of computer vision, and has been applied in the fields of unmanned driving, robot, pedestrian detection and so on. However, the requirements of high detection accuracy, robustness, etc. put forward more stringent requirements and challenges to target detection methods. An improved SSD target detection model based on residuals network is proposed to improve the accuracy of SSD detection for different scenes. In addition, the detection ability of different algorithms in MIT data sets and real traffic scene data sets is compared. The experimental results show that the accuracy of vehicle target detection based on this method is 96.72%, the time consuming is short, the robustness is high, and the method has certain generalization ability, which provides a new way of thinking for the future intelligent auxiliary driving system.
Key Words: deep learning; SSD; vehicle target detection
0 引言
高級驾驶辅助系统(Advanced Driver Assistance Systems, ADAS)是目前智能车辆领域研究和发展的重点,对车辆行驶环境中前方移动目标的准确实时检测是ADAS完成其驾驶任务的重要前提[1]。近年来,智能交通系统(Intelligent Traffic System, ITS)在驾驶技术方面发展迅速,前方车辆检测作为ITS的重要组成部分,起着举足轻重的作用。然而,车辆种类复杂多样,场景环境复杂多变,前方车辆检测成为智能交通系统研究的难点之一,常用方法主要基于传统算法、深度学习。基于传统算法的方法通常通过提取图像中的车辆目标特征进行检测,但鲁棒性较低,泛化能力弱,准确率较低[2]。随着深度学习[3-4]技术的发展,卷积神经网络在计算机视觉领域得以广泛应用,在目标检测领域使用深度学习实现目标检测成为一个新的研究方向[5]。
1 前方车辆检测研究现状
传统前方车辆检测算法模型通常使用基于滑动窗口的局域选择以及手工设计原理解决前方车辆目标难以识别问题,但对滑动窗口的区域选择易受人为主观因素影响[6]。其中,Haar、梯度方向直方图(Histograms of Oriented Gradient, HOG)等被用来检测车辆,但易造成误检和丢失帧 [7-9]。MB-LBP和Adaboost在提取车辆候选区域方面,根据区域的水平边缘和灰度特征去除误检车辆,鲁棒性不高是其缺陷[10]。传统算法的泛化能力较弱,处理大量图片的能力较差,已无法满足日趋复杂的交通场景需求[11]。随着深度学习理论知识的不断强化,实践操作不断完善,对此提出更加有效的解决方法是大势所趋。
文献[12]设计了R-CNN框架,提出基于region proposal(候选区域)的目标检测方法,但该方法计算复杂,难以满足实时性需求。文献[13-14]提出了一种基于快速区域卷积神经网络(Fast R-CNN)的车辆目标发现方法,对前期样本候选区域(object proposals[15])提取过程较为费时,无法在样本和网络之间形成端到端的检测过程。文献[16]提出了一个基于卷积神经网络[17](Convolutional Neural Network,CNN)分类器和卷积算法,鲁棒性较好,但避免不了漏检情况。针对在光照、场景发生变换时车辆检测效果不佳问题,文献[18-20]以Faster R-CNN目标检测方法为基础,提出了改进后的算法,提高了车辆目标检测的准确性,但无法检测出小目标。针对获得小目标精确检测和定位问题,文献[21]提出了区域卷积神经网络Faster-RCNN模型对空地车辆的检测方法,但样本数量不够充分,仅仅局限于检测小型客车车型。为提高检测精度,文献[22]提出了YOLO目标检测框架,但未应用到实际场景中。
针对上述研究方法的不足,本文提出基于SSD(Single Shot MultiBox Detection)的前方车辆检测模型与残差网络(Residuals Network, ResNet)结合算法,收集大量的实验数据样本,研究对比了不同算法在相同数据集上的前方车辆检测能力。实验结果表明,该方法检测率较高,实时性较强,鲁棒性较好,能应用于车辆目标检测。
2 前方车辆检测算法
2.1 算法核心流程
本文将之前SSD网络中的VGG网络替换为ResNet网络,其余結构不变。ResNet结构如表1所示。
首先将采集到的图像输入到ResNet网络模型,对数据样本进行预训练,得到预训练参数;再将SSD目标提取检测网络接在ResNet网络之后,对特征进行提取;多次迭代,选择准确率较高的训练模型,最后将确定的训练模型对测试集进行测试,得到前方车辆检测的准确率,流程如图1所示。
2.2 实验数据集图像预处理
本文收集的数据集共两万多张,包括小部分MIT数据集和行车记录仪视频选取的图片,使用labelImg对图片进行标注。标注框没有重叠,图片中小于6×6像素的车辆不进行标注。每帧标注的图片自动保存为一个XML文件,并与图片一一对应。
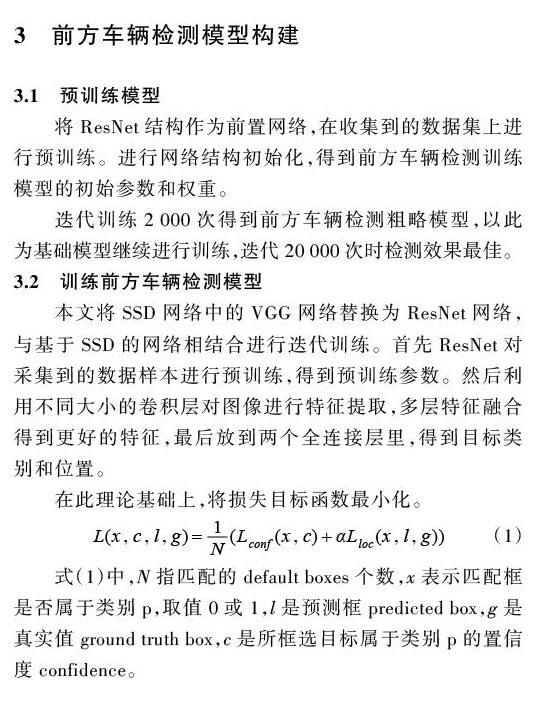
3 前方车辆检测模型构建
3.1 预训练模型
将ResNet结构作为前置网络,在收集到的数据集上进行预训练。进行网络结构初始化,得到前方车辆检测训练模型的初始参数和权重。
迭代训练2 000次得到前方车辆检测粗略模型,以此为基础模型继续进行训练,迭代20 000次时检测效果最佳。
3.2 训练前方车辆检测模型
本文将SSD网络中的VGG网络替换为ResNet网络,与基于SSD的网络相结合进行迭代训练。首先ResNet对采集到的数据样本进行预训练,得到预训练参数。然后利用不同大小的卷积层对图像进行特征提取,多层特征融合得到更好的特征,最后放到两个全连接层里,得到目标类别和位置。
在此理论基础上,将损失目标函数最小化。
4 测试过程
4.1 数据样本
为保证卷积神经网络对样本容量的要求,本文通过公开的Caltech1999数据集、MIT数据集、车载摄像头采集到的部分图片和道路实拍场景图片作为模型的数据样本,按3∶7的比例分为正样本和负样本。本次实验经过多次训练选取较好的训练模型,部分车辆样本如图2所示。对比实验HOG+SVM的部分负样本如图3所示。
4.2 测试环境
本文操作系统为Windows7,搭建深度学习Caffe框架,编程环境基于C++,GPU为Nvidia GTX 850M。训练一次模型的时间大概为40min,整个训练过程采取批量随机梯度下降算法(SGD)优化每一层参数。
5 测试结果及分析
5.1 前方车辆检测对比实验
本文将收集到的数据集和MIT数据集整合,80%作为训练验证集,20%作为测试集;在训练验证集中再重新按比例进行分配成训练集和验证集。按照改进的算法模型进行训练,通过迭代训练调优,得到最佳的网络模型。利用相同的数据集进行训练和测试,实验结果如表2所示。
改进后的SSD网络结构在不同场景下的目标检测效果如图4所示,图4(a)为停车场检测效果,图4(b)为交通道路场景检测效果,图4(c)为夜晚检测效果,图4(d)为阴雨天检测效果。
通过在相同数据集上与原算法作对比,本文改进的SSD网络结构在平均精准度上有明显提升。
在保证样本数据集相同的情况下,利用文献[24]中的传统方法HOG+SVM对实验数据再训练多次,训练一次时长50min,得到较好的训练模型后测试样本数据集。HOG+SVM的传统算法只能检测出正前方车辆而不能检测出旁侧车道的行驶车辆,极易出现漏检情况,如图5所示。
表3为使用HOG+SVM传统算法检测车辆所需耗时和准确率对比。通过表1的对比数据,可看出本文提出的网络模型与HOG+SVM算法相比在准确率上有了明显提高。
图6是其它深度学习网络检测车辆目标的折线图。按不同的epoch进行多次训练,发现随着epoch次数的增加,准确率随之增大,当epoch达到100时,准确率趋于稳定,接近于收敛状态,SSD的检测效果明显优于Lenet-5和ResNet。本文所列所有方法对比结果如图7所示。
6 结语
本文以深度学习理论为基础,结合ResNet网络模型,提出了一种基于SSD的目标检测方法。该网络将ResNet作为前置网络对样本数据集进行预训练,得到预训练模型和预训练参数;然后将SSD网络接入ResNet网络中,对样本数据进行特征提取。将传统方法HOG+SVM、网络模型Lenet-5和Caffe-net在相同数据集上进行实验和比较,研究结果显示,在数据集相同的情况下,SSD车辆检测准确率、鲁棒性、速度更高,对无人驾驶技术研究具有重要的指导意义。
参考文献:
[1] PIAO J, MCDONALD M. Advanced driver assistance systems from autonomous to cooperative approach[J]. Transport Reviews,2008,28(5):695-684.
[2] 宋焕生, 张向清, 郑宝峰,等. 基于深度学习方法的复杂场景下车辆目标检测[J]. 计算机应用研究, 2018(4):1206-1211.
[3] LECUN Y, BENGIO Y, HINTON G. Deep learning[J].Nature,2015,521(7553):436-444.
[4] REN L,CUI J,SUN Y,et al. Multi-bearing remaining useful life collaborative prediction: a deep learning approach[J]. Journal of Manufacturing Systems,2017(43):248-256.
[5] 吴天舒, 张志佳,刘云鹏,等. 基于改进SSD的轻量化小目标检测算法[J]. 红外与激光工程, 2018(7):59-63.
[6] WANG C C R,LIEN J J J. Automatic vehicle detection using local features a statistical approach[J]. IEEE Transactions on Intelligent Transportation systems,2008,9(1):83-96.
[7] 金立生,王岩,刘景华,等. 基于Adaboost算法的日间前方车辆检测[J]. 吉林大学学报:工学版, 2014, 44(6):1604-1608.
[8] 陈拥权,陈影,陈学三. 基于Adaboost分类器的车辆检测与跟踪算法[J]. 计算机技术与发展, 2017, 27(9):165-168.
[9] 吴迪,蔡晓东,华娜,等. 基于HOG和SVM的级别自适应车型识别算法[J]. 桂林电子科技大学学报,2016,36(1):23-28.
[10] 吴骏,李文杰,耿磊,等. 基于单目视觉的前方车辆检测与测距[J]. 计算机工程,2017,43(2):26-32.
[11] 李琳辉,伦智梅,连静,等. 基于卷积神经网络的道路车辆检测方法[J]. 吉林大学学报:工学版,2017,47(2):384-391.
[12] GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C].2014 IEEE Conference on Computer Vision and Pattern Recognition(CVPR).2014:580-587.
[13] 曹诗雨,刘跃虎,李辛昭. 基于Fast R-CNN的车辆目标检测[J]. 中國图像图形学报,2017,22(5):0671-0677.
[14] GIRSHICK R. Fast r-cnn[C]. IEEE ICCV,2015:1440-1448.
[15] WANG X,SHRIVASTAVA A,GUPTA A. A-Fast-RCNN: hard positive generation via adversary for object detection[C].IEEE Conference on Computer Vision and Pattern Recognition.IEEE,2017:3039-3048.
[16] 罗靖遥,黄征. 基于CNN分类器和卷积的目标检测[J]. 信息技术,2017(9):101-104,108.
[17] KRIZHEVSKY A, SUTSKEVER I, HINTON G E. Imagenet classification with deep convolutional neural networks[J]. Advances in Neural Information Processing Systems,2012,25(2):20-26.
[18] 韩凯,张红英,王远,等. 一种基于Faster R-CNN的车辆检测算法[J]. 西南科技大学学报,2017,32(4):65-70,94.
[19] 林封笑,陈华杰,姚勤炜,等. 基于混合结构卷积神经网络的目标快速检测[J]. 计算机工程,2017(6):1-7.
[20] REN S,HE K,GIRSHICK R,et al. Faster R-CNN:towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence,2016(3):1-10.
[21] 彭玮航,王轲,刘少鹏,等. 基于区域的卷积神经网络在空对地车辆检测中的应用[J]. 导航与控制,2017,16(5):40-46.
[22] 龚静,曹立,亓琳,等. 基于YOLOv2算法的运动车辆目标检测方法研究[J]. 电子科技,2018(6):92-101.
[23] LIU W,ANGUELOV D,ERHAN D,et al. Ssd: single shot multibox detector[J]. European Conference on Computer Vision,2016(8): 21-37.
[24] 龚露鸣, 徐美华, 刘冬军,等. 基于混合高斯和HOG+SVM的行人检测模型[J]. 上海大学学报:自然科学版,2018(3):62-68.
(责任编辑:杜能钢)
猜你喜欢
中国教育技术装备(2016年19期)2016-12-27
江苏教育·中学教学版(2016年11期)2016-12-21
江苏教育·中学教学版(2016年11期)2016-12-21
考试周刊(2016年94期)2016-12-12
新教育时代·教师版(2016年23期)2016-12-06
法制与社会(2016年32期)2016-12-01
考试周刊(2016年64期)2016-09-22