
现代农机导航系统设计——基于极限学习机图像智能分类算法
2019-05-24 06:22吴文全
农机化研究 2019年12期
余 华,吴文全
(1.武汉东湖学院 电子信息工程学院,武汉 430212;2.海军工程大学 电子工程学院,武汉 430033)
0 引言
在现代农机导航系统中,机器视觉部分是导航系统的核心。为了实现农机的自主导航,机器视觉部分一般采用图像分割识别技术,对农作物的果实进行自主识别,为了实现这个过程,需要借助相关的智能学习算法。神经网络算法是一种最常用的机器学习方法,其计算精度受到输入输出层和隐含层的权值的影响较大。为了提高神经网络学习算法的计算精度,需要引入极限学习机算法,通过改变权值的设定方式,达到提高计算精度的目的。
1 基于极限学习机算法的定位导航流程
图像识别技术是农机导航视觉设计的核心。与定位导航原理不同,采用机器视觉进行导航时需要对大量图像进行实时处理,以获得果实或者果树的位置坐标。特别是成熟果实的识别,在进行定位时采摘农机需要对成熟度较高的果实进行优先采摘,因此还需要根据颜色特征对图像进行处理,最后根据对成熟果实图像的位置识别实现自主定位。
在农机导航系统中,成熟果实图像的识别是定位导航的核心部分,因此在定位之前首先需要对采集的果实和果树图像进行处理。图像处理可采用极限学习机算法,通过对图像的处理达到图像智能分类的目的,确定成熟果实图像的坐标位置,然后通过采摘农机的路径规划实现农机采摘过程自主定位功能,如图1所示。
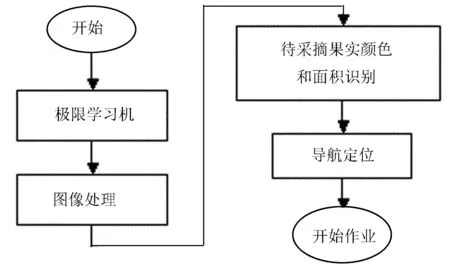
图1 基于极限学习机的果实图像识别流程
extreme learning machine
2 极限学习机神经网络算法及其精度测试
神经网络算法是目前最常用的机器学习算法,其效率和精度主要与输入输出层和隐含层之间的权值相关。权值的选取往往需要根据经验来选取,计算精度较低,效率差。如果能实现权值的随机选取,将输入输出层和隐含层的权值计算转换为最小二乘最优解问题,可以有效提高神经网络泛化能力及神经网络学习速度。
图2为基于极限学习机的神经网络算法基本模型。神经网络算法是图像分割识别的重要算法,假设在进行神经网络训练时有N幅图像数据样本,输入和输出样本数据分为
xi=[xi1,xi2,…xin]T∈Rn,t=[ti1,ti2,…tim]T∈Rm
i=1,2,…,N
(1)
隐藏层节点数为L,则标准单隐含层神经网络可表示为
(2)
由公式(2)可知:阈值在输出层位置是缺失的,因此输入的权值和隐含层的偏置就不需要再调整,可以直接利用输出层的权值,建立神经网络驱动模型。其表达式为
Hβ=T
(3)
其中,H为隐藏层输出矩阵;β为输出权值矩阵;T为输出矩阵。在ω和b固定时,经过激活函数将H在高维呈现线性关系,利用最小二乘法可得
(4)
其中,(H+)T表示样本输入层经过隐藏层后的输出矩阵的Moore-Penrose广义逆矩阵。为了验证极限学习机神经网络算法的计算速度和精度,对一组坐标数据进行处理,以得到定位数据,计算机结果如下:
ELM('diabetes_train', 'diabetes_test', 1, 20, 'sig')
TrainingTime =
0.0568
TestingTime =
0
TrainingAccuracy =
0.9796
TestingAccuracy =
0.9868

图2 极限学习机神经网络算法模型Fig.2 The neural network algorithm model of extreme learning machine
由实验结果可得,极限学习机方法具有耗时短、效率高等优点。将不同学习算法的计算结果进行了统计,结果如表1所示。

表1 不同学习算法精度测试
计算结果表明:相对于其他两种算法,基于极限学习机的BP神经网络算法计算精度更高。
3 基于极限学习机的农机导航系统测试
为了验证方案的可行性,对其图像处理能力进行测试。要想实现农机的自动导航功能,首先需要对待作业的果树进行识别,结果如图3所示。

图3 果树采集识别图像
工作时,首先对传感器采集得到的果树图像进行处理,通过灰度值的改变提取果树的基本轮廓,然后对某个成熟度范围内的果实进行定位。定位结果如图4所示。

图4 果实阈值分割图像
在果树特征提取后,基于极限学习机的神经网络算法可以成功地实行果实特征的提取。为了验证其测量和提取的精度,将计算得到的果实面积和实际果实面积进行了对比,结果如表2所示。
表2 果实面积图像计算值和实际值对比
Table 2 Comparison of fruit area image calculation value and actual value
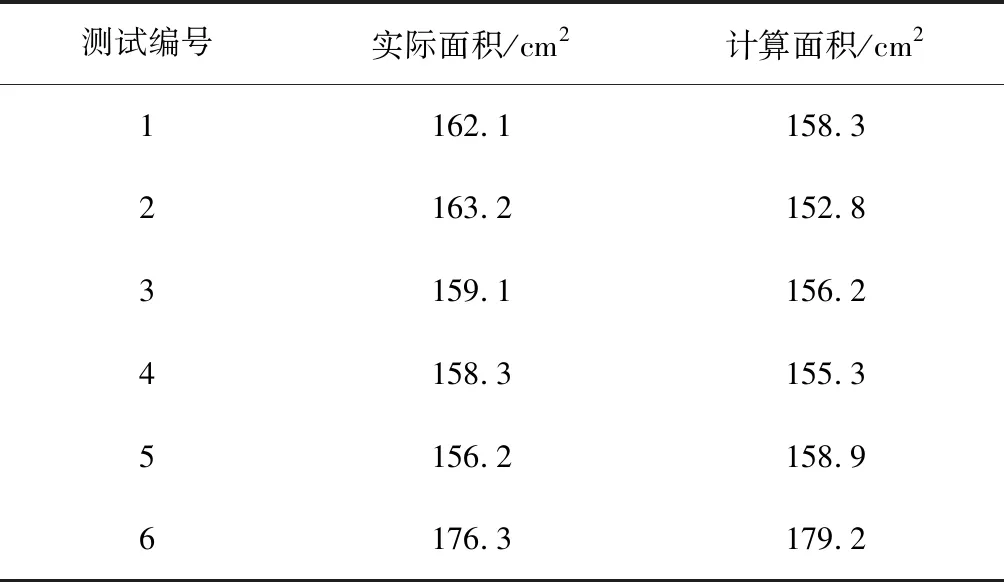
测试编号实际面积/cm2计算面积/cm21162.1158.32163.2152.83159.1156.24158.3155.35156.2158.96176.3179.2
由表2可知:计算得到的果实面积和实际测量面积基本吻合,从而验证了计算的可靠性。
通过摄像机采集果实和果树特征图像后,需要对图像进行处理,提取图像主要特征,建立图像坐标系,然后组建相机空间坐标系,从而获得像素点的相机空间坐标,实现三维重构;最后根据果实和果树的方位和坐标,实现快速导航功能。对快速导航所耗时间进行了统计,得到了如表3所示的计算结果。为了验证极限学习机算法计算的快速性,对定位导航所需时间进行了统计,结果表明:采用极限学习机算法后定位时间有了明显缩短,定位效率有所提高。
对基于极限学习机的农机定位精度进行了测试,结果如表4所示。由表4可以看出:在农机导航系统中使用极限学习定位算法后,定位精度有了明显提升,可以满足农机定位导航系统的设计需求。

表3 快速定位时间测试

表4 导航精度测试

续表4 %
4 结论
为了提高采摘机械导航系统的效率和精度,在视觉导航图像处理系统中引入了基于极限学习机的神经网络算法,通过对成熟果实图像的快速识别,得到果实图像的坐标,达到了快速定位的目的。为了验证方案的可行性,对基于极限学习机的定位导航所需时间和定位精度进行了测试,结果表明:采用机械学习机后明显地提高了导航效率,定位导航耗时少、精度高,可以满足农机定位导航系统的设计需求。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
成都信息工程大学学报(2022年3期)2022-07-21
文萃报·周五版(2021年30期)2021-09-05
邮电设计技术(2021年2期)2021-03-13
成都信息工程大学学报(2021年6期)2021-02-12
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
计算机与数字工程(2018年5期)2018-05-29
计算机测量与控制(2018年3期)2018-03-27
北京航空航天大学学报(2017年6期)2017-11-23
卫星应用(2015年12期)2015-11-23
