
基于篮球运动的果实采摘机器人控制系统研制
2019-05-24 06:22:18张元通
农机化研究 2019年12期
张元通
(郑州商学院,郑州 451200)
0 引言
农业机械作业效率高,可降低生产成本,是现代农业的重要组成部分。随着经济结构调整,农业生产规模增速放缓,农业机械在农忙时节供不应求,农闲时节又闲置,存在利用率不高的问题。我国的农业机械相比发达国家起步较晚,在技术水平和性能结构方面存在一定的差距。精准农业代表了农业的新趋势,对生产技术和机械设备的要求更高,需要智能型的农业机械与其配套。
机器人诞生于20世纪中叶,80年代被首次引入农业工程领域,在精准农业中得到了广泛的应用。农业机器人作为农业机械的高级形式,具有自主的规划和适应能力,可以在复杂多变的环境中完成作业。当前的农业机器人已经应用于移栽、采摘、嫁接、喷药和分级检测等作业,同时具有对农业数据的采集和处理功能[1-2]。农业机器人的设计和制造成本高于普通机械,另外还需要机器视觉、GPS定位、各类传感器和智能控制等新型技术的支撑[3]。
农产品的收获需要耗费较多人力,对产品质量也有重要的影响。大田粮食作物采用联合收割机收获,普遍实现了机械化。与粮食作物相比,各种水果和蔬菜的形状各异且质地柔软,生长环境也复杂多样,机械收获的难度较大,收获环节的工作量占整个种植过程的40%[4]。采摘机器人可以用于果实类农产品的收获,我国也在该领域开展研究,并取得了较大的成效。果实的生长环境都是非结构化的,外部的形态特征复杂多样,影响了采摘机器人对果实的准确识别和摘取。另外,采摘机器人大多针对单一农产品设计,整体和零部件无法通用,导致利用率降低。为此,人们加强了基础理论、关键技术和结构部件等方面的研究,使采摘机器人的作业效果和适应性得到了改善[5-7]。
控制系统作为采摘机器人的核心,对作业效率有着决定性的影响,引入新的技术理念,设计符合果实特征和生长环境的控制系统,是提升采摘机器人性能的关键。体育领域中的球类运动要求运动员追踪目标,并根据具体任务和场上的局势规划行动路线,争抢球权以实现进球。目前,已经有多种球类运动的机器人被研制出来,它们的目标任务与采摘机器人之间存在共同点,控制原理和方法也能为采摘机器人提供参考。以足球机器人为例,比赛的系统包括视觉、决策、无线通讯和机器人4个部分,决策部分可以进行路径规划,是比赛结果的决定因素。研究人员以足球比赛机器人的路径规划和决策方法为依据,针对采摘机器人的特性设计出智能定位和导航系统,实现对农业机械的智能控制[8-9]。
篮球运动是同场对抗类的集体竞技项目,既需要单个队员的实力,也要依靠团体协作,因此对运动员的目标锁定和路线规划能力要求较高[10]。参考篮球运动的决策原理,高效作业的采摘机器人需要具备目标实时跟踪、前进路线规划、自主规避障碍及联合作业的能力。人们已经将篮球运动的决策原理引入到采摘机器人上,改善了机器人的性能。董伯云在多采摘机器人联合作业中加入篮球比赛的协作战术分配方法,通过分散集中的机制控制机器人编队,以最短的行驶路线完成了作业[11]。罗伟以高精度的篮球动作捕捉系统作为采摘机器人的视觉模块,有效地提高了机器人对果实的识别精度[12]。许龙成以模糊控制的篮球比赛避障方法为基础,构建采摘机器人的模糊控制避障系统,提升了机器人的避障能力和实时性[13]。此外,篮球运动的控制方法还与收割机和播种机结合,提高了机械和作业效率和精度[14-15]。
将篮球运动的原理与采摘机器人结合,可以改善采摘作业效率和质量,但目前的研究都是针对机器人的单个性能。本文基于篮球运动的决策原理,研制了果实采摘机器人的控制系统。系统引入篮球运动策略,设计采摘机器人的目标识别、路线规划和自主避障3种功能,并对使用效果进行测试,旨在提高机器人的自动化和智能化作业水平。
1 总体设计
控制系统的搭载平台是GPRT-4型果实采摘机器人,尺寸为1.71m×0.71m×1.22m,用于采摘蔬菜和水果,如图1所示。
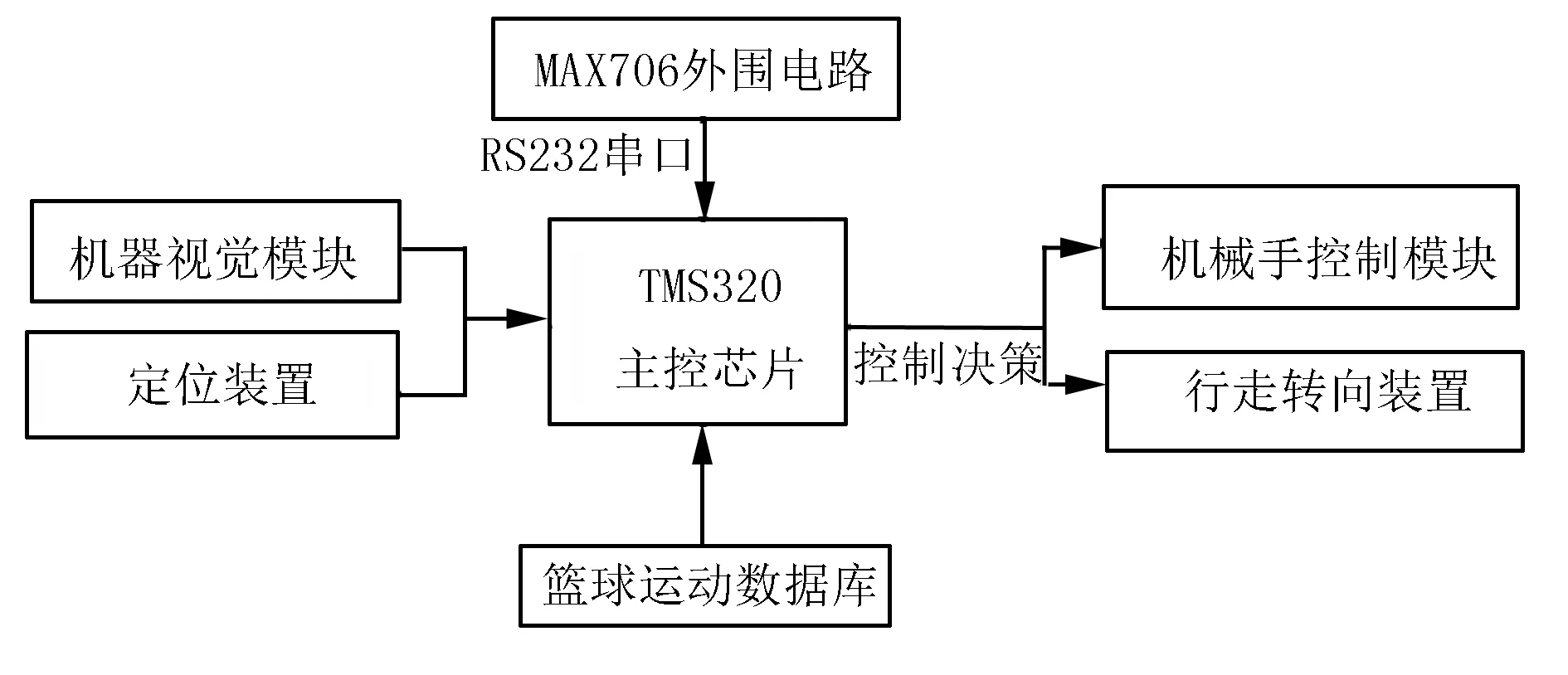
图1 控制系统的总体结构
系统的核心是装载在机器人上的PC110型工业计算机,以TMS320型芯片为控制中心,含有篮球运动规则、战术和策略的数据库。控制中心对各个模块进行管理,分析数据并根据篮球运动数据库形成相应的控制决策。控制中心的辅助模块是MAX706型外围电路,包括复位电路、接口电路和调理电路,通过RS232串口协议与主控芯片连接。
机器人装备具有5个自由度的关节型机械手,臂展达到1.2m,且可以更换以适应对不同果实的采摘。机械手末端执行器的果实接触部位附着橡胶材料,采用电极切割的方式摘取。机械手的控制模块由PC110型工业计算机与P22-3型多轴运动控制卡共同组成,采用开放式的分层控制,具有良好的定位精度和响应特性。机器视觉模块是尼康COOLPIX P60型相机和天创UB570型图像采集卡,具有800万像素,拍摄获得JPEG格式的图像,经过图像采集卡转换为数字信号以供核心计算机分析。行走装置为履带式,采用无级变速,通过液压阀驱动履带实现转向。定位设备是Trimble公司的AgGPS132型产品,由GPS信号天线、接收机及与基站匹配的无线调制解调器组成。
2 控制功能
2.1 目标识别
篮球运动数据库对其中的视频进行分析,捕捉优秀运动员的动作,作为学习的素材。动作捕捉的方式是处理比赛的视频帧,统计技术动作的特征数据,从而获得标准篮球动作的数据支持。视频帧的捕捉是通过机器视觉完成的,因此可以将篮球动作的提取技术应用在采摘机器人上对目标果实进行识别,实现自主采摘作业。
篮球动作捕捉针对的是比赛视频序列,即现场摄像机拍摄随时间变化的一系列动态图像。动作捕捉的关键环节是图像边缘检测,通过滤波、增强、检测和定位这4个步骤提取图像边缘,从而将图像中隐含的动作信息挖掘出来。采摘机器人的作业也是一个动态过程,因此机器视觉拍摄的图像类型和特征与篮球运动相似,对目标的识别可以借鉴篮球动作捕捉方法。机器人目标识别在滤波、增强和定位环节上的处理方法与篮球运动大致相同,在边缘检测环节上则根据作业环境特点选用自适应Canny算法。Canny算法是一种阶梯型边缘检测算法,用指定标准差进行高斯函数滤波,产生梯度矢量计算公式,将特定方向上矢量模极大值点定义为图像边缘。自适应Canny算法针对假边缘和局部边缘丢失的问题,引入信息熵来适应Canny算子的高低阈值,根据信息熵最大时的Canny阈值将图像分为目标和背景两部分。机器视觉模块识别果实的具体过程如图2所示。
2.2 路线规划
篮球运动中为了能够有效突破和提高命中率,运动员都会侧重于路线规划能力的培养。投篮时需要规划篮球的路线使飞行的抛物线更加合理,在没有命中的情况下需要根据预设的路线判断反弹落点,以便进行跟踪并争抢篮板球。在实践中,运动员首先观察场上形势进行信息搜索,通过对信息的综合分析和分类比较等思维加工过程形成决策,获得规划的路线。
本文的控制系统对机器人采集到的果实分布和位置信息进行处理,利用篮球运动的决策模型规划作业路线。与篮球运动员的训练过程相似,机器人在作业前也需要应用神经网络对采摘环境和果实信息进行搜索处理的模拟训练。机器人借鉴篮球运动的决策方法形成思维能力,规划获得多种路线,然后通过比较分类选择最佳的方案。
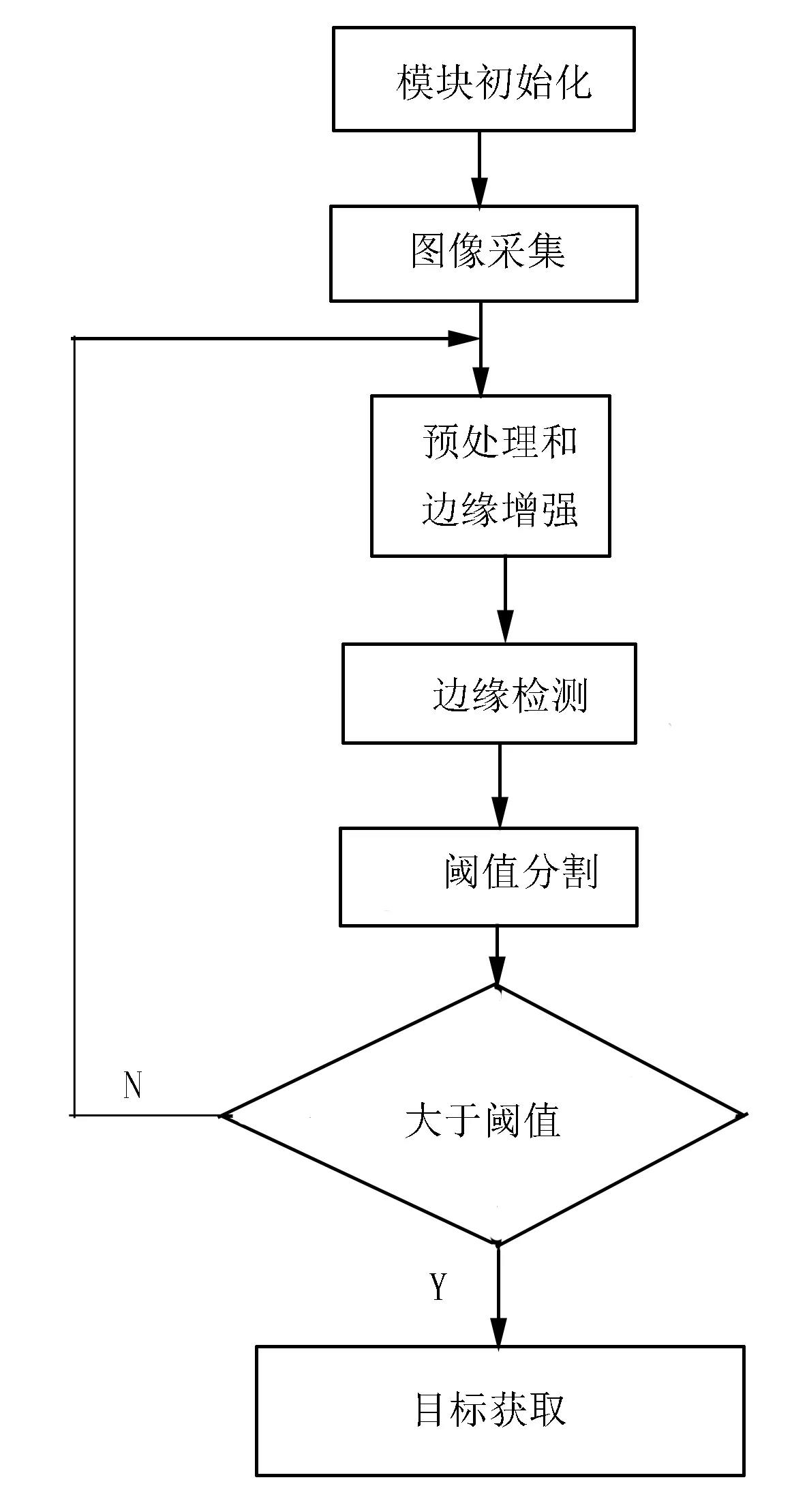
图2 机器视觉的目标识别流程
2.3 自主避障
对于篮球运动的进攻方来说,目标是篮筐的位置,但是在前往目标的路线上会存在多个障碍,即不断移动的防守方队员。根据篮球比赛的规则,进攻方队员应避免与障碍直接碰撞。因此,进攻方需要实时掌握障碍的位置、运动方向及速度,并依照这些参数不断地调整自身的移动方向和速度,才能到达目标点。
基于篮球运动的控制系统依据篮球避障原理,采用人工势场模型的控制方法实现机器人的自主避障。人工势场是以电磁场为基础理论的抽象力场,假设目标点周围存在吸引机器人的引力场,障碍物周围存在排斥机器人的斥力场。引力场和斥力场共同组成人工势场,其方向和大小符合电磁场规律,具体特性可以用势场函数来描述。人工势场模型搜索势场函数下降最快的方向作为机器人的移动方向,就可以避免与障碍物直接碰撞,同时尽快接近目标。人工势场模型的结构和算法较为简单,还能辅助路线规划功能获得平滑的路径,赋予采摘机器人较强的机动特性和避障能力。
3 功能测试
为了测试控制系统的3种功能,机器人分别对柑橘、荔枝、西红柿和黄瓜进行采摘试验,柑橘的识别如图3所示。每种果实在自然状态下选择100个,用系统识别和采摘,记录识别率、采摘率、机器视觉分析的响应时间,并计算机器人的采摘效率。作业完成后,记录机器人的行走路线及与树木、植株、农业设施等障碍物的碰撞次数。
测试的结果表明:控制系统的机器视觉模块可以获取自然环境图像,经过边缘检测后准确地识别目标果实;机器人对4种果实的识别率都高于92%,采摘率高于91%,响应时间小于0.26s,能够满足实时、精准采摘的要求。其采摘效率为12.1~18.0个/min,能够高效地完成采摘作业,作业效率如表1所示。在整个测试过程中,机器人的行走路线短,没有出现路线重复和与障碍物碰撞的情况,体现出自主作业的能力。

图3 柑橘果实的识别

表1 采摘机器人的作业效率
4 结论
基于篮球运动的决策原理,研制了果实采摘机器人的控制系统。系统装载在GPRT-4型果实采摘机器人上,根据篮球运动的决策原理设计了采摘机器人的目标识别、路线规划和自主避障3种控制功能。测试结果表明:控制系统可以准确地识别目标果实,采摘机器人获得了较高的作业效率,且可自主规划行走路线和规避障碍,具有很高的智能化水平。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24 01:12:58
幼儿园(2021年11期)2021-11-06 05:25:04
高技术通讯(2021年5期)2021-07-16 07:20:42
数学小灵通·3-4年级(2020年11期)2020-12-14 07:05:40
数学小灵通·3-4年级(2020年3期)2020-06-24 05:50:50
石油地球物理勘探(2017年4期)2017-12-18 07:15:06
小学生导刊(2017年31期)2017-08-15 00:53:14
山西大同大学学报(自然科学版)(2016年2期)2016-12-12 03:19:40
小学生导刊(低年级)(2016年8期)2016-09-24 23:55:21
系统工程与电子技术(2016年4期)2016-08-24 07:46:22
