
耕作土壤地表三维形貌测量装置设计与试验研究
2019-05-24 09:48刘雪宁李旭英张永志
农机化研究 2019年7期
刘雪宁,李旭英,张永志,金 旭,张 恒
(内蒙古农业大学 机电工程学院,呼和浩特 010018)
0 引言
耕作土壤地表不平度对农业灌溉及能否进行机械化耕作、发挥机械效率等方面有着至关重要的影响[1-3]。对于农用机械而言:一方面,耕作土壤地表不平度导致农用机械产生振动,直接影响农用机械的平稳性、乘坐舒适性,且振动产生的载荷会夯实土壤,影响农作物生长[4-10];另一方面,耕作土壤地表不平度直接影响播种、移栽等农用机械的作业效率。因此,通过对耕作土壤地表三维形貌的测量,获得区域内耕作地表的三维图像,全面反映耕作土壤地表的不平度,对土壤不平度的分析和评价整地的质量具有重大的意义。
耕作土壤地表不平度的测量方法根据是否与被测地面接触分为接触式与非接触测量两大类[12]:接触式测量会对耕作土壤表面产生一定程度的破坏,导致不能精确地测量到地表不平度;非接触测量方法测量精度、效率高,不会使土壤表面变形,便于重复测量,因此被广泛应用。常用的非接触测量方法有立体摄像法、超声波测量法、图像阴影法及激光扫描法等:立体摄像法在后期处理数据时所需时间较长;超声波测量法测量原理是声波发射,具有声波的扇形发射特性,不适合精准的定点测量,且其测量精度只能精确到厘米级;图像阴影法测量所得的地表不平度受测量时的光照强度影响较大,具有不确定性;激光扫描法测量是由一束极小的激光进行测量,适合精确测量,且其测量精度可以达到毫米级[11]。本研究根据采样要求,设计一种测量范围为1m×1m,三坐标组合式基于激光反射的耕作土壤地表三维形貌测量装置,全面反映任意方向的耕作地表不平度,使测量更为精确、直观、全面。
1 地表三维形貌测量装置的设计
1.1 总体设计
三坐标组合式耕作土壤地表三维形貌测量装置主要由运动测试台、控制箱和上位机等组成,如图1所示。其中,运动测试台主要包括测试架、激光位移传感器、光电接近开关、同步带导轨、步进电机及水平尺等。为了方便携带,采用铝合金材型材搭建可拆卸的测试架,将两套带有滑块的同步带导轨分别安装在测试框架平行的两侧上构成Y轴,带有滑块的同步导轨安装在Y轴两个滑块上构成X轴,激光位移传感器固定在X轴滑块上。通过控制箱驱动X轴电机,X轴滑块带着激光位移传感器沿X轴方向移动;驱动Y轴电机,由Y轴滑块带动X轴同步导轨沿Y轴方向移动;间歇驱动两轴电机即可完成激光位移传感器对测试范围内耕作土壤地表三维形貌的测量。同时,利用采集模块将激光位移传感器采集的数据通过通信串口上传到上位机LabVIEW软件中,对数据进行处理,利用MatLab软件绘制耕作土壤地表三维形貌图。
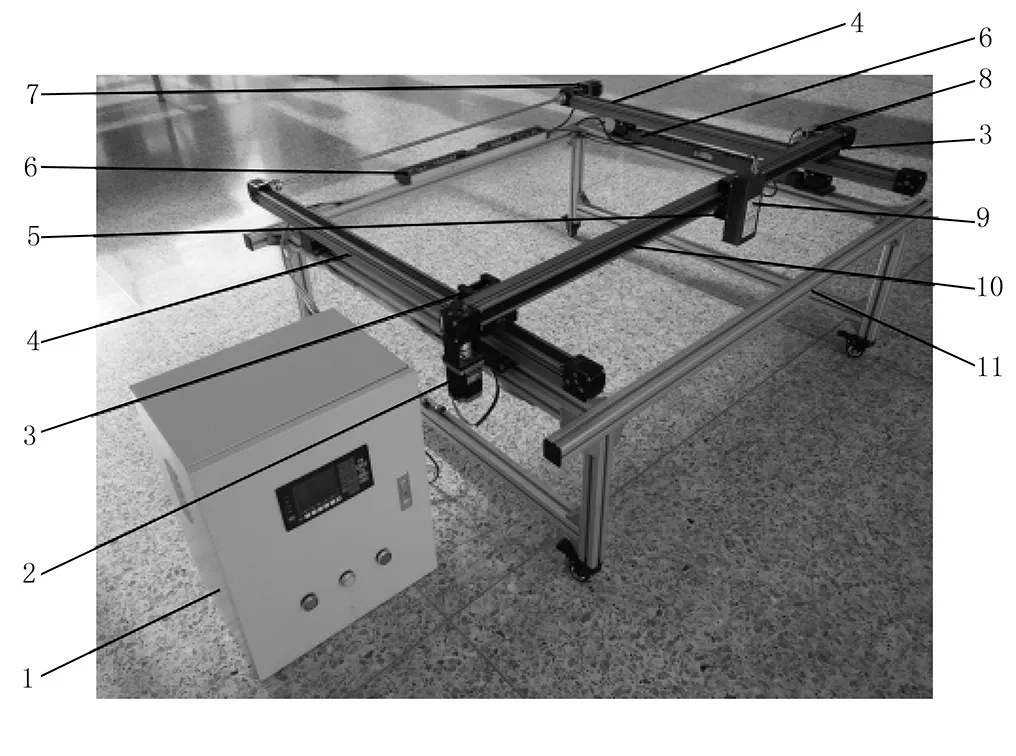
1.控制箱 2.X轴电机 3.Y轴滑块 4.Y轴导轨 5.X轴滑块 6.水平仪 7.Y轴电机 8.光电接近开关 9.激光位移传感器 10.X轴导轨 11.测试框架图1 耕作土壤地表三维形貌测量装置Fig.1 3D surface topography measuring device for tillage soils
1.2 硬件部分设计
测量装置的硬件主要由运动测试台和控制箱两部分组成。运动测试台的测试区域为1m×1m,测试架距地表距离为0.6m,由3套同步带导轨构建X、Y坐标,配有57HBP76AL4-TF0型两相步进电机,其步距角为1.8°。由TC-01激光位移传感器对耕作土壤地表进行三维形貌的测量,其量程是1m,精度是1mm,波长620~650nm,输出0~5V模拟电压。控制箱部分主要由开关电源、全数字高性能两相步进驱动器ZD-2HD542、KBM-30D单通道数据采集模块、串口转换器、CM4OL智能多轴步进控制器,以及触点式开关等组建而成。开关电源将220V的交流电换成24V的直流电,为两相步进驱动器、多轴步进控制器、激光位移传感器等供电,串口转换器将采集模块采集到的数据传送到上位机软件。
1.3 软件部分设计
1.3.1 测量轨迹编程设计
测量轨迹如图2所示。图2中滑块所在的位置为程序零点,将起始点的位置作为机械零点,由安装在测试台上光电接近开关的位置设置机械零点。测量时,要求运动测试台的运动与数据采集系统的实现精准的配合。首先,控制器驱动滑块做回机械零运动到达A点;其次,控制器间接驱动X、Y轴电机带动安装在滑块上的激光位移传感器沿A→B→C→D→E做蛇型运动,当滑块到达A点时,采集系统开始采集;随后按实际测量范围要求循环上一步操作,直至滑块到达M点,再次驱动X轴电机使滑块带动传感器完成M→N的扫描;当滑块到达N点时采集系统停止采集,完成对整个测量区域的测量;最后,控制器驱动滑块做回程序零运动,以待下次测量。
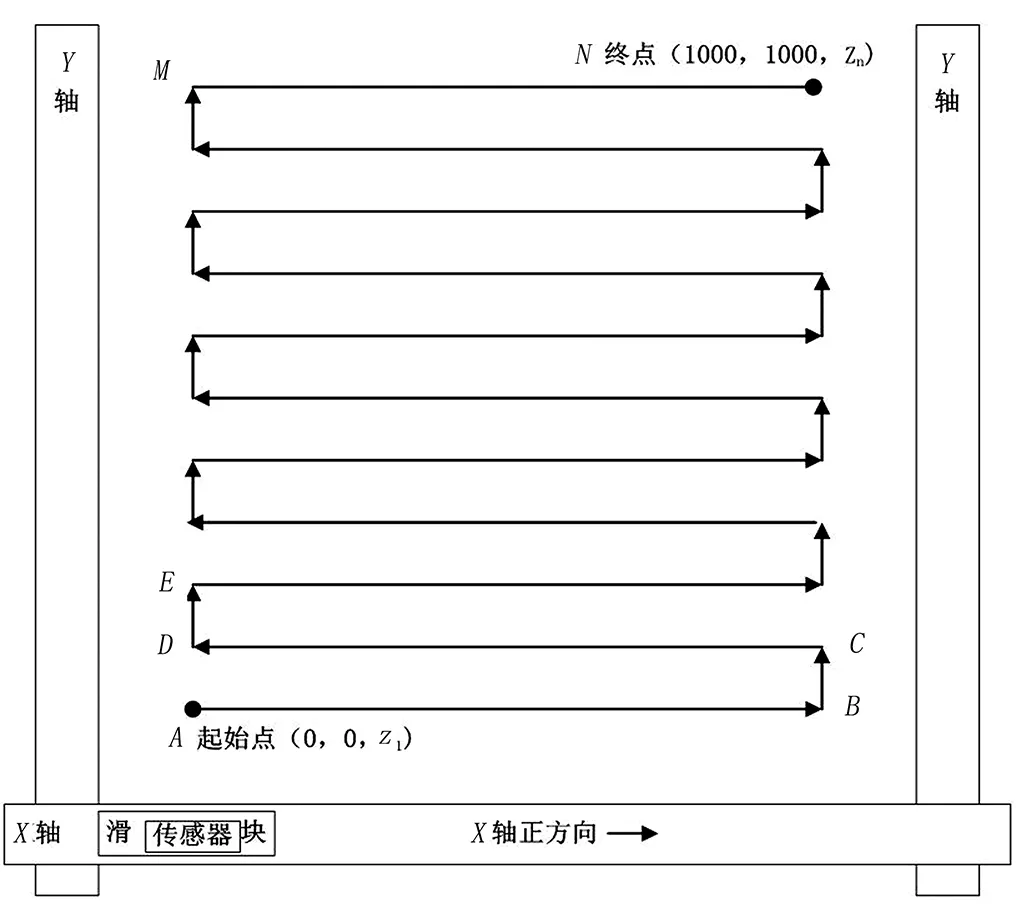
图2 测量轨迹示意图Fig.2 Schematic diagram of measuring path
在CM4OL智能多轴步进控制器中编写运动轨迹程序,使得滑块带动激光位移传感器完成对整个平面的测量,其编程界面如图3所示。

图3 双轴控制器编程界面Fig.3 Programming interface of two-axis controller

1.3.2 数据采集编程设计
测量装置的上位机数据部分由LabVIEW 2013软件编写,实现了数据采集、数据处理、实时数据显示、实时数据的曲线显示、数据存储及参数设置等功能。上位机数据采集处理软件前面板界面如图4所示。

图4 耕作土壤地表三维形貌数据采集界面Fig.4 Data acquisition interface of 3D topography surface of tillage soils
启动上位机编写好的数据处理软件,选择正确的I/O端口,根据实验要求设置采样间隔(1、2、5、10、100mm可选),选择数据文件存储路径并命名;在程序前面板点击开始按钮,使采集程序运行,随后点击智能多轴步进控制器启动键,智能多轴步进控制器自动运行上一次读取的程序,此时激光位移传感器正常工作,采集模块将采集数据上传到上位机软件。
采集到的数据被保存在设定的路径文件中,将数据进行抽取、重组等方法可以计算任何方向的耕作土壤地表不平度;也可通过MatLab软件中的xlsread函数读取保存好的excel中的完整数据,将读取到的数据在MatLab软件中进行一系列处理,利用surf函数绘制耕作土壤地表三维形貌。
2 测量装置的验证
2.1 激光位移传感器的标定
耕作土壤地表三维形貌测量装置的测量原理是利用激光位移传感器测量传感器到地面的距离,因此对激光位移传感器的标定对整个测量装置的精确度而言是至关重要的。
TC-01激光位移传感器的标定是通过改变传感器到被测物的距离的同时测量此时输出电压值,得出测量距离与输出电压信号的对应关系。三维形貌测量装置的测试台距地面是573.5mm,因此在距激光位移传感器底部150~750mm的范围内利用标准量块(IT2)每隔50mm取点测量其输出电压值,每点重复测量10次,取均值作为该点的输出电压值。将此时的电压值和对应的实际距离值进行标定,其标定曲线如图5所示。
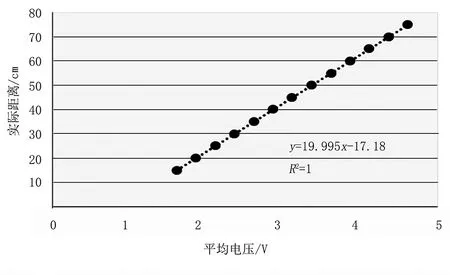
图5 激光位移传感器的标定曲线Fig. 5 The fitting curve of laser range sensor
2.2 测量装置精度检验评价
此次测量试验选择IT2的标准量块为检测对象,1~3个厚度的量块其误差范围为0~1.2×10-3mm,4~10个厚度的量块其误差范围为0~1.5×10-3mm。首先,用水平仪找正平台,将厚度为1~10mm的10块量块分别摆放在平台上,调平测试台。由激光位移传感器测量相对平台的距离,通过编辑控制系统驱动激光传感器对平台上的量块进行测量,测量结果如表1所示。分析对比测量均值数据与量块数据,利用两者之间的理想状态直线y=x进行拟合,得到拟合曲线为y=1.000 3x+0.020 5,计算两者的相关系数R2=0.999 7,几乎接近1,测量数据的均方根误差为0.017mm,证明测量装置的测量精度较高,可以较准确地测量出耕作土壤的地表不平度。
2.3 测量装置的验证实验
测量装置主要分为3大部分,即运动测试台、控制箱和数据采集部分,实现测试装置的高效精确测量,不仅要设计稳定的运动测试台、可靠运行的控制箱,更要设置合适的采集频率、采样间隔及同步带速度等3个参数。通过多次采集实验得出:在采样频率≤4Hz的情况下,采集数据不会出现漏采、重采等问题。为了能够高效完成对整个平面的测量,在此试验中采集频率均选择4Hz。同步带运动可以精确到0.001mm,采样间隔可以根据不同的试验要求设定,当设置采样间隔为1、2、5、10mm等间隔时(X、Y轴选择相同的采样间隔),在采样频率确定的情况下对应的同步带速度分别为240、480、1 200、2 400mm/min,完成1m×1m的测量需要时间为69.444、17.361、2.778、0.694h。通过室内小范围实验,发现采样间隔为10mm时也能较好地测量出物体的表面轮廓,结合测量效率,因此本次试验采样间隔为10mm。
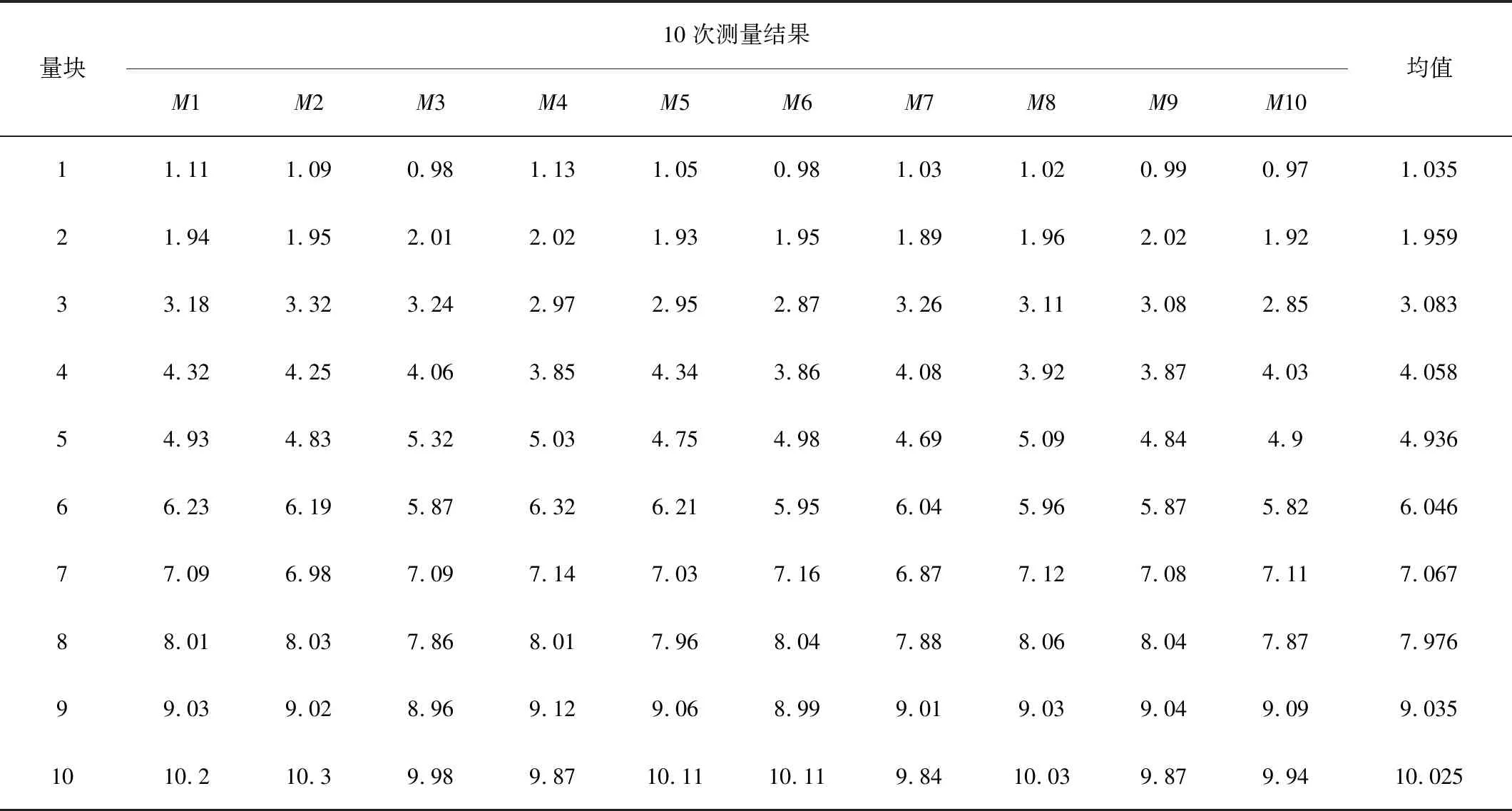
表1 测量装置测量量块数据Table 1 Measuring device measures the data of the block mm
室内验证试验的测量对象为楼梯模型,图6(a)所示为模型原图,利用测量装置对其进行测量得到如图6(b)所示的三维图。
对比两幅图可以得出:本研究所设计的耕作土壤地表三维形貌测量装置能够实现对耕作土壤地表三维形貌的测量。
(a) 模型实物图
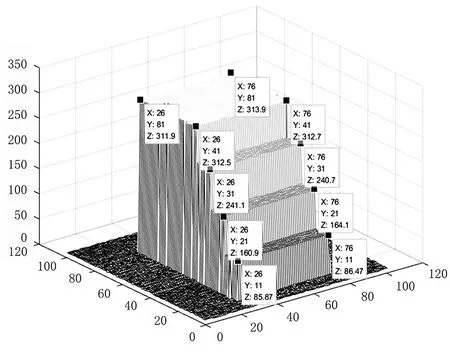
(b) 测量所得三维图图6 模型实物图与测量三维图的对比Fig.6 Comparison of model physical drawing and measuring 3D drawing
3 结论
1)设计了一套耕作土壤地表三维形貌测量装置,室内验证实验表明: 测量装置能实现对耕作土壤的地表三维形貌的准确测量。
2)该测量装置将地面测量从二维直线的测量发展到三维平面的测量,在测量范围上有较大的突破。测量过程中测量数据采用点阵形式呈现,可以通过提取等方式实现任意方向的不平度计算并能显示整个扫描范围内的耕作土壤地表三维形貌图。
猜你喜欢
农业技术与装备(2022年3期)2022-05-31
山东农机化(2022年1期)2022-03-05
腐植酸(2021年2期)2021-12-04
中国土壤与肥料(2021年5期)2021-12-02
农业知识(2021年19期)2021-10-16
青岛画报(2017年12期)2018-02-06
求学·理科版(2017年10期)2017-12-19
商周刊(2017年22期)2017-11-09
婚姻与家庭·性情读本(2017年1期)2017-02-16
中学生数理化·高一版(2008年4期)2008-11-15
