
精准变量施肥控制软件设计研究
2019-05-24 06:22:10初金哲庄卫东衣淑娟
农机化研究 2019年12期
初金哲,庄卫东,衣淑娟
(黑龙江八一农垦大学 ,黑龙江 大庆 163319)
0 引言
20世纪90年代以来,精准农业在发达国家发展较快,规模较大。在美国中西部大平原,土地相对平整,经营规模广阔,精准农业发展较为迅速。目前,精准农业技术领域已涉及植物保护、施肥、精量播种、水分管理和耕作等各相关领域[1]。
在国外,欧美等国家走在农业技术发展的前端,根据需求大量减少化肥的投入量,使用时根据农作物的需求釆用精准农业技术,精确地调配化肥和农药的投入量,提高了化肥和农药的利用率,使生产成本下降,增强了施肥效果,同时降低了农药与化肥对于环境的污染[2]。欧美等国家还通过提高化肥和农药的质量及采用农业机具进行中耕施肥,使化肥和农药的利用率大幅度提升,主要以日本、美国、法国等西方国家为代表[3-6]。大多数发达国家的科学家确立了较为完整的信息网络,将每年的农作物产量与磷肥、氮肥、钾肥施肥量,以及土壤养分含量、肥料类型、生长关键期的墒情分布等数据输入到精准农业系统进行存储,取得了较大的科研进步[7]。目前,精准变量施肥技术在发达国家的大多数大型农场得到应用,其化肥和农药的利用率达到72%左右。
国内精准变量施肥技术研究的起步相对于欧美等国发展较晚,且设计的精准变量施肥控制软件对于我国的农作物都具有针对性、地域特殊性,还不适合我国的不同地区和不同农作物施肥模式。精准变量施肥技术仍处于性能测试时期,所以并没有在我国进行大地块间的推广与应用。我国肥料投入使用的技术和手段相对落后,我国化肥的平均利用率仅为35%左右[8],造成了肥料的巨大浪费,生态环境的迅速恶化。因此,我国从2005年起决定在大田间开始大力推广和普及精准变量施肥技术。近年来,国内的很多高等院校和农业科研单位大量引入国外先进的精准变量施肥技术,进行消化和接纳,取得了显著的成果。我国自主研发了适用于玉米大豆等农作物的变量施肥机具和精准变量施肥控制系统,主要以国家农业信息技术研究中心、中国农科院、北京农林科学院、河北农业大学、吉林大学及上海交通大学等科研院校为主,并建立了土壤肥料信息系统、小麦综合管理专家系统、变量施肥智能空间决策支持系统及田间地理信息系统等[9-11]。
为此,针对目前国内变量施肥技术的研究现状,通过利用Visual Basic6.0、MapObject2.2软件编写精准农业变量施肥控制软件,包括对GPS设备的接收与发送端口数据编写、CAN总线数据的接收与发送端口数据编写、CANCOM转换模块编写、施肥调试功能编写、变量施肥标定功能编写、变量施肥处方图功能编写及记录作业图功能编写。通过编写的软件进行室内试验,对精准变量施肥控制软件各部分功能进行进一步优化,为下一步在田间进行变量施肥作业试验打下基础。试验由精准变量施肥控制软件操控室内变量施肥试验台上进行,能够最大限度地提高肥料的利用率[12]。
为了操控变量施肥试验台,设计了变量施肥控制软件,可达到提高肥料利用率、提升农民生产经济效益和环境效益、按需施肥的目的,提高了我国现代化农业变量施肥的技术水平。
1 精准变量施肥控制软件设计
1.1 软件总体框架
依据精准变量施肥控制软件的主要研究内容,将精准变量施肥控制软件整体框架结构划分为8大模块,即GPS设备的接收与发送端口数据模块、CAN总线数据的接收与发送端口数据模块、CANCOM转换模块、输出模块、施肥调试模块、变量施肥标定模块、变量施肥处方图模块及记录作业图功能模块。编写8个功能模块,以施肥调试模块和变量施肥处方图模块为研究的中心环节,其界面如图1所示。

图1 精准变量施肥控制软件界面图
1.2 GPS接收模块
GPS接收功能模块可以通过RS-232串口接收GPS信息,包括时间、日期、卫星个数、卫星信号、速度、经度、纬度、大地高程及航向等,并显示GPS数据流,接收到GGA、RMC、GSV、VTG、GSA、BD等语句,保证了各项信息实时的更新及GPS数据信息准确性、实时性。GPS接收功能模块如图2所示。
1.3 CANCOM转换模块
利用一个CANCOM转换模块将CAN数据转换为串口数据进行接收,也可以通过软件发送串口数据通过CANCOM转换模块转换为CAN数据进行发送。
1.3.1 设备连接
首先将CANCOM转换模块连接好电源线、CAN总线及USB转232转换器。EARTH管脚为接地线,CAN_G 为信号地,这两个脚可不用连接;CAN_L为CAN低,CAN_H为CAN高,不要接反。CANCOM转换模块连接电源后,设备3个灯的状态应该为PWR常亮,COM闪烁,CAN不亮。CAN灯只有在有CAN数据收发或配置时才会亮起。转换模块如图3所示。

图2 GPS接收功能模块

图3 CANCOM转换模块
1.3.2 配置说明
配置界面如图4所示。需要配置的参数主要有串口波特率和CAN总线波特率,配置前需要确认好这两个信息。转换模式选择为透明转换,配置好参数后点击写配置,完成配置工作。
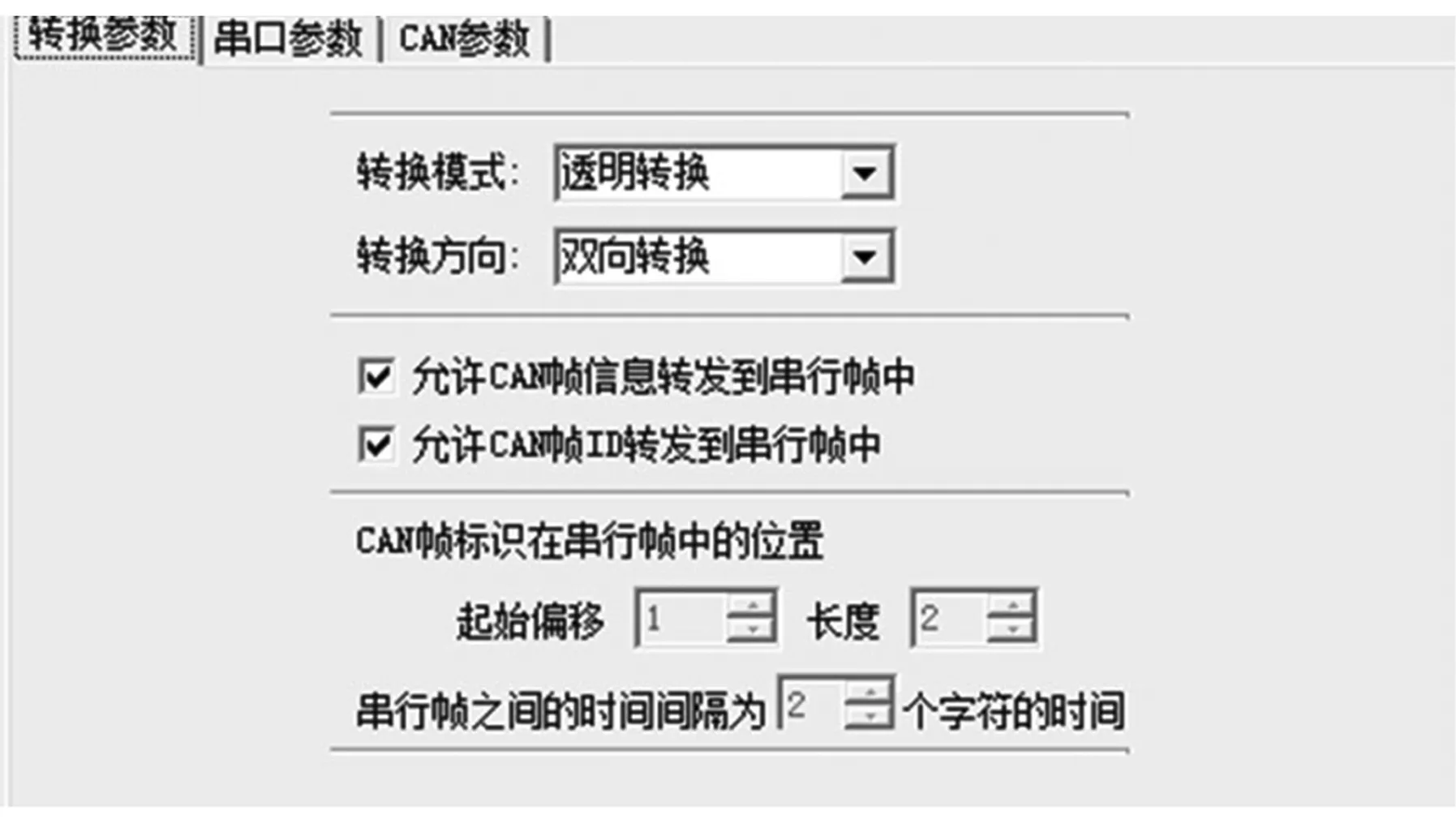
图4 调制配置界面
1.4 输入输出模块
输入输出模块主要包括两大部分,即RS-232串口的接收与输出、CAN总线数据的发送与接收。
1.4.1 RS-232串口的接收与输出
首先选择与GPS设备相符的通信端口号(COM2)设置基本信息如下:通信波特率选择为9 600,奇偶校验为无,数据长度为8,停止位为1位;然后,点击打开按钮精准变量施肥控制软件开始接收GPS信息。串口输出调试界面如图5所示。

图5 串口输出调试界面
1.4.2 CAN总线数据的接收与输出
首先选择与变量施肥试验台设备相符合的CAN总线数据端口号COM1,通信波特率选择为250 000;然后,点击打开按钮精准变量施肥控制软件开始接收变量施肥试验台发送的CAN总线数据信息,以及通过软件向变量施肥试验台发送CAN总线数据信息指令操控变量施肥试验台进行作业试验,如图6所示。
1.5 施肥调试模块
施肥调试模块是精准变量施肥控制软件的核心部分,可以精准地调控变量施肥试验台进行变量施肥作业。施肥调试模块包括机具信息、施肥管理、施肥作业信息、设备信息等模块。
1.5.1 机具信息
进入机具信息模块选择相对应的机具信息,如肥管数目、作业幅宽等;选择完毕后,点击确定按钮进行更新信息。机具信息界面如图7所示。

图7 机具信息界面
1.5.2 施肥管理
进入到施肥管理模块,首先选择使用肥料的名称与类型,然后进行总体目标施肥量的选择。本模块设置了化肥类型为N肥、P肥、K肥、W肥等4种肥料类型供使用者进行选择,可供选择的肥料分别为尿素、硝酸钠、磷酸一铵、磷酸二铵、硫酸钾及硫酸锌等,如图8所示。

图8 施肥管理界面
1.5.3 施肥作业信息
在机具信息与施肥管理信息选择完毕后,进入施肥作业信息模块就会出现如图9所示的信息。施肥作业信息模块的主要作用是直观地显示出所选择化肥类型、化肥名称、肥管数量、化肥排量、目标施肥量,以及用来观测的实际施肥量等信息。

图9 施肥作业信息界面
1.5.4 设备信息
在设备信息模块中,可以直观地观测到所连接的变量施肥试验台的通讯信息、作业状态、作业幅宽、地轮转速、行驶速度及马达转速的信息,如图10所示。地轮转速、作业幅宽、作业状态及实际马达转速都来源于变量施肥试验台传输的信息(即通讯信息)。行驶速度可以取自GPS接收机的速度,也可以人为进行修改。当点击启动作业按钮时,机具开始进行作业,页面中实际施肥量及实际马达转速根据行驶速度的改变和目标施肥量的改变开始发生改变;点击停止,机具作业停止。

图10 设备信息界面
1.6 变量施肥标定模块
变量施肥标定模块可以观测肥料类型、肥料名称、目标转速、运行时间、倒计时及实际转速等信息。变量施肥标定模块是用来检测软件中所显示的液压马达转速和液压马达的实际转速是否相同,以此来判定精准变量施肥控制软件能否精准地控制机车的马达转速;进入变量施肥标定模块后,首先选择肥料类型和肥料名称,然后选择目标转速并输入目标值,最后设置运行的时间。点击启动按钮可以观测实际马达转速的数值,以此与目标值进行对比,来判定精准变量施肥控制软件能否精准地控制机车的马达转速。施肥标定界面如图11所示。

图11 施肥标定界面
1.7 变量施肥处方图模块
变量施肥处方图模块可以观测调入软件中处方图的经度、纬度、土壤养分含量及机车的行驶速度(输出级别)。依据在变量施肥处方图上的一定变量施肥处方图界面,可以实时观测到地图上个点的经度、纬度及土壤养分含量等信息,如图12所示。

图12 变量施肥处方图界面
首先选择添加图层调入变量施肥处方图,选择控制图层和分组级别可以直观地根据颜色看出在这一地块中土壤养分的分布情况;点击开始作业按钮,变量施肥试验台开始模拟地块进行变量施肥作业;作业结束后,变量施肥试验台停止工作,软件后台会对本次基于变量施肥处方图的变量施肥作业进行记录,并将记录图保存在DATA文件夹中,名字为2017年12月22日9点55分31秒开始作业记录,文件类别为MDB 文件。
1.8 记录作业图功能模块
记录作业图功能模块可以观测调入软件中作业记录图记录的点数、经度、纬度、施肥量最大值和最小值、变量施肥作业的行走路径等信息,如图13所示。

图13 记录作业图界面
首先点击打开作业数据按钮打开记录图文件,选择施肥量点击绘制图,软件会根据变量施肥试验台行走的路径进行绘制。如果想直观地显示,也可以点击投影图按钮。随着鼠标在记录图上点的移动,软件会显示出实时的点的经度、纬度、实际施肥量等信息(也可以通过观察颜色来直观判定施肥量得多少)。点击回放按钮,记录图界面会显示变量施肥作业过程中从开始作业到结束作业过程中每一个记录点,最终合成行走路线(记录图)。
2 精准变量施肥控制软件测试试验
2.1 试验方案
变量施肥试验台正常运转后,打开施肥监控系统及施肥控制器,将尿素装入肥箱,将排肥轴动力装置连接液压泵站,将排肥器的排肥口打开,开启施肥控制器中的精准变量施肥控制软件;打开串口与CAN口接收变量施肥试验台数据信息,分别为通讯信息、作业状态、实际施肥量及地轮转速等,进入变量施肥调试界面设定肥料类型、肥料名称、肥管数量、化肥排量、目标施肥量、作业幅宽及机车行驶速度等参数;点击启动作业按钮,变量施肥试验台开始运转,排肥轴开始转动,在试验台开始运作5s之后、排肥器运作稳定时开始进行试验。将排肥器的开度定位55mm,开启施肥控制器进入变量施肥调试界面进行操作,设定机车行驶速度5km/h,在触摸屏中利用触摸笔进行操作点击,目标施肥量数值改变。试验中,目标施肥量调控范围为300~450kg/hm2,运行时间60s,排出的肥料名称为尿素。最后,点击启动作业按钮,排肥轴开始转动,在试验台开始运作5s之后、排肥器运作稳定时开始试验。
2.2 试验结果
对于尿素,当排肥器的开度定位在55mm,确定机车行驶速度为5km/h,改变目标施肥量调整范围在100~450kg/hm2,采集到变量施肥试验台实际的液压马达转速数值。对采集到的数据运用SPSS软件进行回归分析,如表1、表2所示。

表1 目标施肥量与马达转速之间的关系

表2 回归分析表

续表2
由表2可看出:显著性为0,小于0.05。这说明,目标施肥量与马达转速之间有影响并且极显著。回归分析表中的Beta值代表回归系数,Beta值大于0.8,说明方程线性相关。该数为0.946,大于0.8,说明目标施肥量与马达转速之间存在线性关系。
3 结论
编写了精准变量施肥控制软件,通过对软件的性能和功能检测,进一步优化,最终确定软件核心功能符合本文设计的需求。精准变量施肥控制软件实现了CANCOM数据信息之间的转换交流。试验结果表明:本精准变量施肥控制软件技术先进、性能可靠、操作方便,具有较高的控制精度,满足设计要求。
猜你喜欢
现代农村科技(2022年9期)2022-08-16 02:25:50
制造技术与机床(2018年12期)2018-12-23 02:41:02
小学生导刊(2017年15期)2017-05-17 05:44:09
棋艺(2016年4期)2016-09-20 06:15:27
中国塑料(2016年3期)2016-06-15 20:30:00
工业设计(2016年7期)2016-05-04 04:02:44
江西煤炭科技(2015年2期)2015-11-07 03:10:00
机械工程师(2015年9期)2015-02-26 08:38:08
湖南农业科学(2014年20期)2014-02-27 14:32:55
湖南农业科学(2014年8期)2014-02-27 14:32:13
