
基于多源数据分析的TEDS故障识别技术研究
2019-05-23 08:47崔中伟
铁路计算机应用 2019年4期
杨 凯,刘 彬,崔中伟,谢 斌
(1.中国铁道科学研究院集团有限公司 电子计算技术研究所,北京,100081;2.中国铁路总公司 机辆部,北京 100844;3.北京经纬信息技术有限公司,北京 100081)
利用动车组运行故障动态图像检测系统(TEDS,Trouble of moving EMU Detection System)[1]对动车组行车安全进行监控是保障动车组运行安全的一种重要监控手段[2]。
TEDS是一种安装于高速铁路轨旁的图像采集监控设备,其利用轨旁图像传感器实现运行动车组走行部,制动配件,底架悬吊件,钩缓连接,车体两侧裙板,转向架等部位可见光图像的实时采集,并在此基础上,采用图像自动识别技术进行处理与分析,发现动车组车体两侧,底部的异常状态并自动报警提示,能够为动车组运行状态的故障发现提供技术支持[3]。然而,由于受光照,天气,复杂车体状态等图像采集环境的变化,以及图像识别技术自身发展限制的影响,单点运行的TEDS故障自动识别存在明显的识别准确率低,误判率高的问题,难以满足现场运用需要[4]。
目前,TEDS故障自动识别方法主要包括目标提取法与差异比较法[5]。其中,受图像识别技术发展,动车组故障发生率等局限的影响,目前主要采用的是差异比较法。所谓差异比较法[6],是指利用当前采集的动车组监控图像(简称:当前图)与参考图像进行图像特征的求差,将特征差异明显的区域标记为故障异常。根据参考图像类型的不同,差异比较法又分为2种方式:(1)利用TEDS采集的当前图与动车组的标准图像进行差异比较(标准图像比较法);(2)利用同一列车的当前图与历史采集图像进行差异比较(历史图像比较法)[7]。标准图像比较法,参考图像内容精确标准,能够实现当前图像差异的准确判定,然而受到动车组检修维护,自然老化等因素的影响,容易将车体正常的变化误判为故障,误判率较高。历史图像比较法,将当前图与近期的历史图进行比较,能够有效避免车体正常变化带来的故障误判问题,由于历史图像是实地现场采集,受铁路沿线复杂环境的影响,参考内容不够准确,亦存在明显的故障误判问题。
现有TEDS设备监控及故障识别仍主要采取单点设备运行的方式,可作参考的图像主要是当前监控设备的历史监控图像,随着TEDS设备综合联网监控系统的建设[8],同一铁路线多点的TEDS设备能够实现对同一列车不同时间,不同地理位置监控图像的采集。如何利用联网运行的TEDS[9],整合不同空间与时间TEDS设备采集的列车图像进行多源数据分析,研究更加有效的故障识别方法,具有重要的研究价值与意义。
1 方法设计
1.1 总体流程
为了解决上述问题,本文设计了一种基于多源数据的动车组故障识别方法,如图1所示。该方法将当前TEDS设备近期采集的该动车组历史监控图像作为时间历史图,同一线路上该动车组最近经过的其它TEDS设备采集的监控图像作为空间历史图,当前TEDS设备采集的该动车组监控图像作为当前图,将时间历史图,空间历史图分别与当前图进行图像配准,获取时间历史配准图及空间历史配准图,将时间历史配准图进行加权平均作为历史标准图,将空间历史配准图进行加权计算作为故障权重矩阵,将当前图与历史标准图进行变化检测获取特征差异矩阵,利用特征差异矩阵与故障权重矩阵计算得到故障标记矩阵,从而得出动车组图像故障部位并自动提示报警。
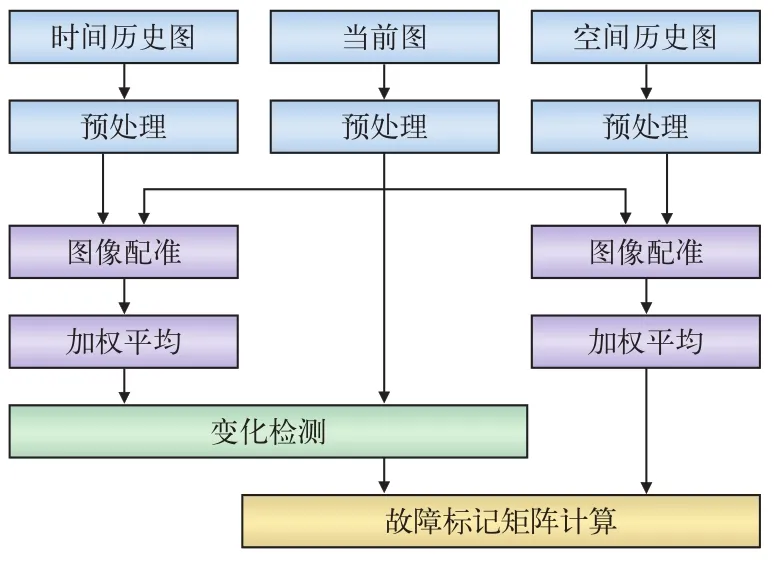
图1 故障识别方法流程图
1.2 算法步骤
根据上述方法的总体流程,进一步设计具体算法,步骤如下:
(1)设当前TEDS设备近期采集的该动车组历史监控图像按时间倒序分别为s(0,-1),s(0,-2),…,s(0,-n),同一线路上该动车组最近经过的其它TEDS设备所采集的监控图像按照经过顺序倒序分别为s(-1,0),s(-2,0),…,s(-n,0),当前TEDS设备采集的当前图为s(0,0),如图 2 所 示。 分 别 将s(0,-1),s(0,-2), …,s(0,-n),s(-1,0),s(-2,0),…,s(-n,0)以及s(0,0)进行图像预处理(包括亮度变换,对比度变换,去噪,去雾等),得到预处理后的图像s"(0,-1),s"(0,-2),…,s"(0,-n),s"(-1,0),s"(-2,0),…,s"(-n,0),以及S(0,0);利用图像配准算法分别将s"(0,-1),s"(0,-2),…,s"(0,-n),s"(-1,0),s"(-2,0),…,s"(-n,0)与S(0,0)进行图像配准,得到时间历史配准图S(0,-1),S(0,-2),…,S(0,-n),以及空间历史配准图S(-1,0),S(-2,0),…,S(-n,0)。
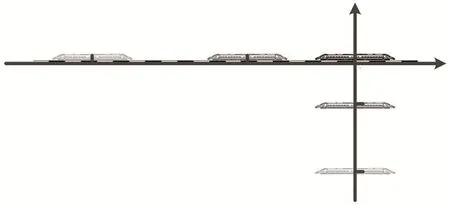
图2 动车组监控图像标记示意图
(2)设时间历史配准图为S(0,-1),S(0,-2),…,S(0,-n),则历史标准图Sh为:
其中,αi—加权值,
∑αi=1 ;k—整数。
(3)设空间历史配准图为S(-1,0),S(-2,0),…,S(-n,0),则故障权重矩阵W为:
其中,βi—加权值,
∑βi=1;δ—权重系数;
k—整数。
(4) 将预处理后的当前图S(0,0)与历史标准图Sh分别进行基于小波变换的边缘提取[10],得到当前特征图C与历史特征图Ch;将当前特征图C与历史特征图Ch进行差异比较,得到特征差异矩阵D。
(5) 特征差异矩阵D的各元素与故障权重矩阵W相应的元素进行计算,得到矩阵F";利用图像分割算法,对矩阵F"进行计算,得到故障标记矩阵F。
矩阵F"利用如下式计算:
设D={xi|i=1, 2, …,M},W={yi|i=1, 2,…,M},分别表示特征差异矩阵与故障权重矩阵,则矩阵F"的各元素为:
故障标记矩阵F利用如下式计算:
其中,F={zi|i=1,2,…,M},
γ—阈值,常数。
(6)框选故障标记矩阵中值为1的图像位置,并合并相邻框,形成故障报警标记位置。
2 试验及效果
2.1 试验设计
为验证上述方法的有效性, 在不影响现场TEDS正常监控作业的情况下,本文仅选取位于上海铁路局的某TEDS探测站设备(日均过车较多且临近探测站较多)开展试验。由于动车组本身车体状态相对稳定,运行故障隐患较为稀少,因此,本文仅针对动车组车底,侧下部运行中夹带的纸团,塑料袋等异物类故障隐患开展识别试验。
具体试验步骤设计为:
(1)选取存在车底,侧下部夹带异物情况的10列动车组监控图像(仅取故障所在车辆及部件图像);
(2)对于每一列车,分别根据车组号获取同一探测站下该车最近连续过车监控图像7列次;
(3)对于每一列车,根据列车运行交路信息查找该车沿途历史所经车站对应的TEDS探测站,获取2日内各探测站该车监控图像;
(4)利用上述数据,采用本文算法对列车故障进行识别,并与原探测站当日监测时原识别算法上报的故障预警信息情况进行比较。
试验过程中,本文算法采用MATLAB实现,算法运行硬件环境为4核3.6 GHz CPU,16 GB内存计算机,运行环境为W indow s 1 064 bit操作系统。所对比的原探测站算法运行于TEDS轨边机房服务器上。由于与对比算法运行环境不同,本试验过程未计算算法运行时间。
2.2 试验结果及分析
经试验统计可知,试验数据中共包括实际故障隐患位置10处;原探测站共计上报疑似故障标记128处,准确预报故障隐患7处,其余均为误报,漏报故障隐患3处;采用本文方法共计上报疑似故障标记85处,准确预报故障隐患9处,如图3、图4所示。
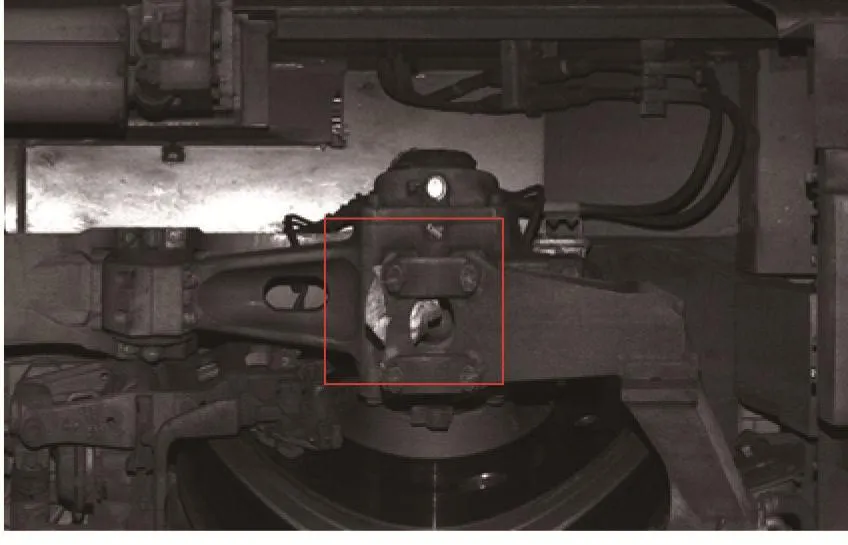
图3 本文方法预报故障截图A

图4 本文方法预报故障截图B
其余均为误报,漏报故障隐患1处。本文方法相较既有方法能够提高故障自动识别率,降低误报率。进一步分析发现,采用本文方法漏报的故障隐患其异物的图像特征与车体背景较为一致,且总体亮度较暗,人工看图时亦不易察觉如图5所示。
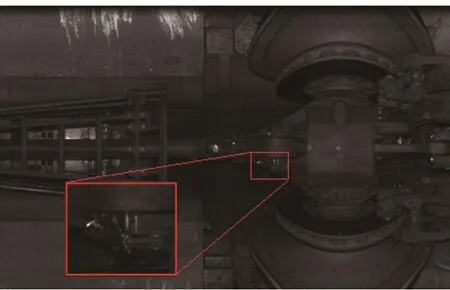
图5 本文方法漏报故障截图及局部放大示意图
3 结束语
本文基于联网应用的TEDS,结合传统的差异检测法,对不同空间与时间TEDS采集的同一列车图像进行多源数据分析,提出了一种基于多源数据的动车组故障识别方法。该方法通过对时间、空间数据采取不同方式的配准融合,并设计与当前采集图像求取权重差异,从而实现动车组车体异常部位检测。试验表明,本文提出的故障识别方法,能够建立更为准确的对比参考源,减少自然环境,车体运行环境等对成像内容的影响,从而有效提高动车组运行故障自动识别率,降低误报率。同时,本方法也是一种将故障自动识别归集于硬件资源更为充裕,运行环境更为稳定的监控中心的技术思路,为优化TEDS轨旁设备结构,提高设备运行稳定性提供了技术依据。下一步,将在不断累积动车组故障类型及数量的基础上,针对动车组关键部位及部件开展基于深度学习的故障识别研究。
猜你喜欢
数理化解题研究·综合版(2021年11期)2021-12-22
铁道通信信号(2020年4期)2020-09-21
语数外学习·高中版中旬(2020年7期)2020-09-10
海峡姐妹(2020年2期)2020-03-03
伙伴(2020年1期)2020-02-14
读与写·教育教学版(2017年10期)2017-11-10
山东工业技术(2016年15期)2016-12-01
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
