
飞翼布局无人机实验平台设计与实现
2019-05-20 11:05屈晓波吕永玺王长青
实验技术与管理 2019年4期
屈晓波,吕永玺, 王长青
(西北工业大学 自动化学院 实验教学中心, 陕西 西安 710072)
飞翼布局飞机通常取消水平尾翼及垂直尾翼,采用翼身融合设计,与常规布局飞机相比具有低阻力、高气动效率、低翼载荷、大容积率、结构效率高、低雷达反射截面积等优势[1-2],是未来先进飞行器的发展方向之一。随着计算机和飞行控制技术的发展,无尾飞翼布局飞机的安全性和可靠性得到大幅提高,能满足执行空中侦察、情报监测、充当诱饵、电子信息战、无人自主空战等任务的需求。
本文结合多种飞行实验科目的需求,针对飞翼布局无人机实验平台的设计进行了初步探索,利用CFD方法对设计的2种飞翼布局方案进行了数值计算,获得了该飞机的关键气动数据,借助于计算机辅助设计(CAD)软件创建了方案B的三维电子样机,采用制作工艺实现了该实验平台的零件加工和装配,并基于该飞行实验平台开展了一系列飞行实验科目的试飞验证。实验结果验证了本文设计方法和方案的可行性,具有较好的工程应用前景。
1 总体设计思路
1.1 主要技术指标
拟开发的飞翼无人机实验平台主要用于搭载小型飞行控制系统、高精度飞行参数记录系统以及图像传感器等设备开展飞行实验,可用于飞行控制律试飞验证、飞机模型辨识、图像识别与跟踪算法试飞验证等实验教学以及科学技术研究等。借鉴国内外小型飞翼布局无人机的发展状况,拟定实验平台的主要指标:最大起飞重量15 kg;有效载荷≥3 kg, 任务载荷空间容积≥15 L,巡航速度80~126 km/h,实用升限3 000 m,航程100~150 km。
1.2 设计思路
飞翼布局飞机具有阻力小、气动效率高、装载空间大、机体结构效率高、雷达可探测性低等优势。但也存在一些亟待解决的问题:升力系数相对较小或者中立航向稳定性与阻尼特性,大升力状态下俯仰力矩呈现不稳定趋势等[3]。因此,为了提高飞翼飞机的综合性能,改善上述问题,可从平面形状、翼型选择、优化及三维布置、重心位置配置等方面考虑。
1.2.1 平面形状设计
在设计飞翼布局平面形状时,重点关注参数是机翼的前缘后掠角,它对飞机的纵向稳定性、前向雷达散射截面波峰的分布起到决定性作用[4]。机翼后掠角增大,有利于提高高速气动效率,改善阻力发散特性和前向隐身性等,但会影响低速气动特性和飞机的起降性能。反之,则容易满足起降及低速时飞行升阻特性要求,但对飞机高速性能产生不利影响。故机翼后掠角的大小选择是兼顾高低速特性的一种折中。
平面形状设计要综合考虑发动机、任务载荷等位置和容积要求,这决定了该处剖面的绝对厚度。若使用相对厚度较小的翼型,就要求该位置的弦长不能太短。另外,也要考虑操纵面力臂的需求,过短的操纵力臂会降低舵效,影响飞机的操纵特性,故气动特性与舵面操纵效率之间需折中设计。
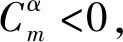
本文采用机翼前缘中度后掠、后缘倒置双“W”平面布局,类似于美国B-2隐形轰炸机[1],如图1所示。机翼前缘后掠角为35°,机身处绝对长度较大,方便机载设备安装,有利于全机重心配置。外翼段展弦比相对较大,有利于提高飞机的升阻比,改善纵向配平及操纵性能。为了提高飞机的隐身性能,机翼边缘采用平行设计法则,飞机外轮廓线尽量平行[3-4]。

图1 飞翼无人机平面形状及重心参考位置
与平直机翼相比,后掠翼表面气流的横向流动特性更为突出,会产生翼尖或者外翼过早失速的问题。气流分离主要发生在机翼后缘,这将对该位置处布置的操纵面的气动特性产生非常不利的影响,使得舵效显著减弱或者丧失。气流分离与舵面偏转严重耦合时还会影响飞机的俯仰和滚转稳定性[4]。因此,翼尖或外翼过早失速的问题需要改善,其措施主要包括:气动扭转、几何扭转、翼尖平面形状及参数优化、增加前缘缝翼或翼刀等。
1.2.2 翼型的选择及布置

1.2.3 全机重心位置
相对于常规布局飞机,飞翼布局飞机的重心位置与全机气动焦点关系更加密切[6]。飞翼布局飞机只能靠机翼上面的舵面偏转产生配平和操纵力矩实现飞机的纵向力和力矩的平衡。因此,通常要求飞翼纵向具有弱静稳定性,即全机重心布置在气动焦点附近靠前的位置。为了获得更好的气动性能,亦可放宽飞翼的纵向静稳定性,将重心配置在全机气动焦点之后,但需借助于飞控增稳系统改善飞机的飞行品质,保障飞行安全。在没有增稳系统辅助控制情况下,飞翼则需要设计成纵向静稳定的,航向控制问题则需要通过创新型气动效应面来解决,比如翼尖开裂式阻力方向舵、嵌入式操纵面、全动翼尖等。飞翼布局飞机的气动焦点主要由机翼的平面形状决定。因此在平面形状设计是就需要考虑大型结构部件以及主要装载设备的位置布置,以免方案推倒重来。
本实验平台要求无人机具备自动飞行、纯遥控(人工)飞行两种典型飞行控制模式,即飞机的纵向设计成静稳定的。飞机的纵向静稳定余度配置在5%~8% MAC[5-6],MAC为平均气动弦长。重心位置变化范围如图1所示。
1.3 设计方案
本文拟采用两种方案进行对比分析和研究,利用CATIA软件创建的三维数模如图2所示。两种方案舵面配置相同,即在飞机后缘布置8个操纵面,机身轴线至翼舵面尖分别为δ1L/δ1R、δ2L/δ2R、δ3L/δ3R、δLSDR/δRSDR。载机设备、任务载荷、发动机(单发)安装在机身段,起落架、油箱安装在内翼段。两种设计方案主要几何参数保持一致:机长1.08 m,翼展2.77 m; 机翼面积1.33m2,平均气动弦长0.65 m。
方案A中,机身和内翼段分别选用NACA0015、NACA0012对称翼型(Cm0≈0),机身具有明显凸起部分(考虑机载和任务设备安装),外翼段采用相对厚度较大的MH92低速反弯度“S”翼型(Cm0>0),便于开裂式阻力方向结构布置及数字舵机的安装和维护,翼尖无几何扭转。
方案B中,机身段采用融合设计,各截面均采用修型的E186-M低速反弯度“S”翼型(Cm0>0),翼尖具有-3°几何扭转。
两种方案的外翼段均采用最大弯度靠前且后缘卸载略大的“S”翼型,可以减小设计点俯仰力矩系数大小,提高俯仰自配平能力,同时减小因巡航配平而产生的附加阻力,提高飞机气动效率。
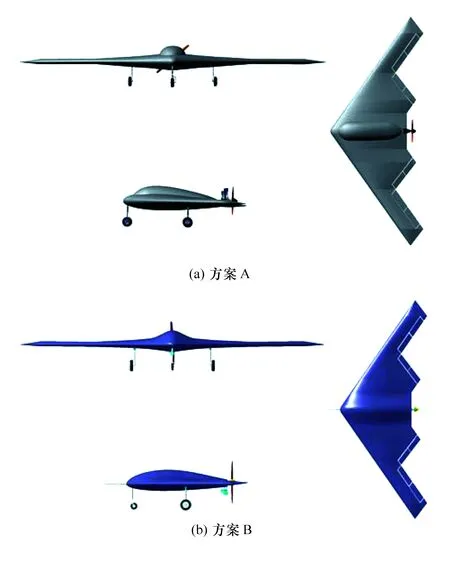
图2 飞翼布局无人机实验平台方案
2 CFD气动分析
2.1 计算网格
随着计算机软硬件技术的飞速发展,计算流体力学(computational fluid dynamics, CFD)方法已经成为一种与风洞试验互为补充、互相验证的重要设计手段,在航空航天领域里得到了广泛的应用[7-9]。本文采用ICEM-CFD软件创建飞翼飞机的外流场网格,该软件具有完善的CAD结构,方便导入包括CATIA在内的多种CAD模型数据[10]。拟采用结构化网格进行CFD计算,生成过程主要包括4步:第1步,导入飞机几何外形并建立流体计算域; 第2步,块的划分及块的关联; 第3步,针对整个流场细化网格,满足网格质量要求; 第4步,导出网格,生成求解器所需的网格类型文件。
本文的计算流场域中采用了多块拓扑结构生成贴体结构网格,并对近避免区域进行网格加密处理。考虑到空气黏性因素,即为了保证壁面第一层网格的摩擦雷诺数约为1,所有计算工况下飞机近壁面均利用“O”型网格进行周向加密处理,首层网格厚度设置为(0.2~1)×MAC×10-5。
根据对称性原则,飞机的纵向基本气动采用半模计算,网格数量为500~600万。横侧向基本气动计算采用全模,网格数为1 000~1 200万。各舵效计算采用舵面独立偏转构型全模,网格数为1000~1200万。全机六面体结构网格示意图如图3所示。
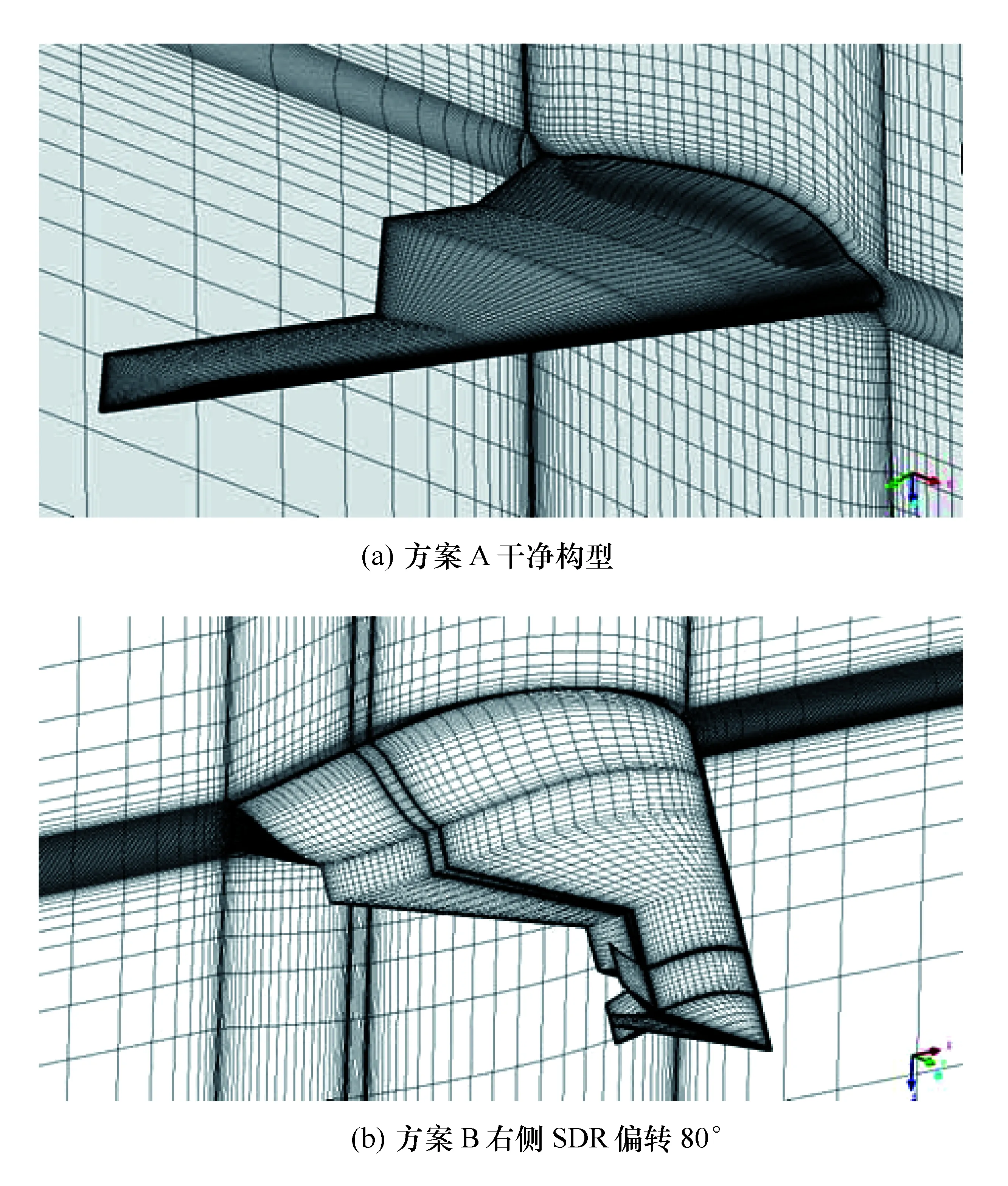
图3 飞翼布局无人机六面体结构网格示意图
2.2 计算工况
数值计算中,通过改变入口边界处的速度矢量模拟飞机在不同迎角、侧滑角下的流动特性,方便批量计算。计算空速V=25 m/s,迎角-2°≤α≤22°,侧滑角β=-18°~18°,雷诺数Re=1.06×106(平均气动弦长处),操纵面偏转角δi=-20°~20° (i=1,2,3),开裂式阻力方向δSDR=0~120°。
2.3 流场求解
本文采用CFX Solver求解器,该求解器采用基于有限元的有限体积法,在保证有限体积法的守恒特性基础上,吸收了有限元法的数值精确性的优点。计算中采用定常流动进行求解,控制方程采用Navier-Stokes,空间离散为Roe格式,湍流模型为SST模型,计算残差收敛精度10-5,利用有限体积法(FVM)将控制方程进行离散处理,对流项为二阶迎风格式进行求解推进[11-12]。采用分布式并行计算(4台4核HP xw8600工作站),单个文件收敛时间为5~6 h。
2.4 计算结果分析
在空速V=25 m/s,高度H=1 000 m的飞行状态下,方案A/B纵向基本气动特性(升力系数CL、阻力系数CD、俯仰力矩系数Cm、升阻比随迎角变化的曲线)如图4所示; 横侧向基本气动特性(侧力系数Cr、滚转力矩系数Cl、偏航力矩系数Cn随迎角变化的趋势)如图5所示。各舵面的操纵特性可参考文献[13-14]。
图4 纵向基本气动特性

图5 横侧向基本气动特性
2.4.1 纵向基本特性分析

(3) 巡航迎角α=4°状态下,方案A中俯仰力矩系数Cm,α=4°<0,需要升降舵配平; 方案B中俯仰力矩系数Cm,α=4°≈0,其纵向力矩自配平性能力更强;
(4) 两种方案的最大升阻比非常接近,方案B的配平升阻比将更具优势。
2.4.2 横侧向基本特性分析
(1) 由于取消了垂尾,飞翼飞机的侧面积非常小,侧滑飞行时产生的侧力系数非常小,侧力系数随迎角增大呈现增加趋势;
(5) 小侧滑角范围飞翼的侧力系数、滚转力矩系数和偏航力矩系数曲线呈现线性变化趋势,这有利于横航向增稳系统的设计和实现。
2.4.3 全机压力分布
飞翼布局无人机在α=4°状态下,半机翼上表面压力云、典型站位面压力分布如图6所示(方案A为左翼,方案B为右翼,另一侧分别与之对称,η为站位面)。分析可知:
(1) 方案A中突起机身的机头位置出现了局部高压区,且对周围产生了明显干扰,这对飞机阻力不利;
(2) 方案B采用翼身融合设计,飞机的上表面等压线延伸到翼身融合段,全机整体作为一个升力体共同产生升力。翼尖几何扭转使得机翼外段上等压线平行度好,缓解了气流沿翼展流动的趋势,减缓翼尖气流分离;
(3) 与方案A相比,方案B上翼面尾部正压力区域较大,后缘卸载范围大,贡献更大的抬头力矩,有利于改善飞翼飞机俯仰配平及操纵特性。
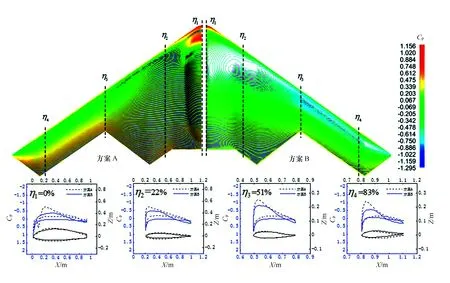
图6 两种方案上翼面压力云及各站位面压力系数分布(α=4°)
3 飞翼布局无人机实验平台
3.1 CATIA三维建模
飞翼布局无人机实验平台(XQ-6B)的所有结构均使用CATIA软件设计。该软件参数化设计方案给零部件尺寸修改提供很大便利,尤其是在无人机的结构打样协调阶段、飞机气动外形及几何尺寸反复迭代期间,可明显节省研制周期,CATIA软件至上而下的产品设计思路使得工作人员设计效率大为提高[15]。基于该辅助设计软件,可以实现三维电子样机虚拟装配、运动机构动态仿真,从而减少加工、装配过程中零件和组件的报废率,降低研制成本。
在CATIA中创建完整的零部件数字模型,进行虚拟装配后,生成2D加工零件图,之后进行切割排版,利用高精度激光切割机完成飞机零件的切割。XQ-6B实验平台的全机三维数模如图7所示,其装配桁架数模如图8所示。

图7 XQ-6B全机三维数模

图8 XQ-6B 装配桁架数模
3.2 实验平台制作
飞翼布局无人机实验平台内部骨架主要使用巴尔莎轻木、航空层板以及碳纤维管等材料,机翼蒙皮采用玻璃纤维+环氧树脂工艺进行结构强化。非金属零件由激光切割机加工而成,内部骨架采用环氧树脂胶接方式连接。为保证飞机的气动外形,制作装配过程中利用桁架进行制作和细致装配,如图9所示。起落架、发动机、舵机等部件采用螺栓固定,方便拆装和维护。图10为飞翼布局无人机实验平台(方案B)的总装实物图。

图9 XQ-6B 装配桁架实物图

图10 XQ-6B飞翼无人机实验平台总装测试
4 实验平台飞行实验
XQ-6B典型飞行实验状态:起飞质量约10 kg,含机载燃油0.8 kg、导航飞控系统及数据记录仪2 kg,机载电源0.5 kg;全机纵向静稳定余度约6% MAC,该飞翼无人机的舵面分配如图11所示,机身内侧4个舵面为升降舵,外翼内侧舵面为副翼,左右翼尖位置开裂式阻力方向舵用于控制飞机的航向[13-14]。

图11 XQ-6B舵面分配示意图
截至目前,该飞翼布局无人机实验平台已制作8架,先后在不同机场完成了近百架次飞行实验。典型实验项目包括:遥控评估飞机的操纵性和稳定性、飞行参数辨识科目、增稳控制系统飞行实验、自主姿态控制飞行实验、自主航向飞行实验、自主起降飞行实验,以及多机编队飞行实验等。图12为XQ-6B实验平台搭载小型导航飞控系统开展相关飞行科目实验现场图。自主巡航及自主降落试飞如图13所示。方案A验证机实物图及试飞情况可参考文献[14]。

图12 搭载飞行控制系统开展飞行实验

图13 XQ-6B自主巡航及自主降落试飞
5 结语
本文探索了飞翼布局无人机实验平台的设计思路,完成了2种设计方案,借助于CFD技术获得了飞机的关键气动数据,采用计算机辅助设计软件CATIA建立了该飞翼的三维数字样机,开展了实验平台制作、装配和系统集成与测试等工作,并基于该实验平台完成了诸多飞行实验科目。CFD计算结果与试飞数据验证了本文设计方法的可行性,体现了实验平台的通用性和工程应用前景,为我校先进飞行控制系统综合实验教学、学生科研训练及科技创新活动提供了强有力的实验平台支撑。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
北京航空航天大学学报(2021年6期)2021-07-20
液压与气动(2020年2期)2020-02-18
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
能源(2017年5期)2017-07-06
中国科技信息(2016年15期)2016-11-04
西北工业大学学报(2015年4期)2016-01-19
中国卫生(2015年2期)2015-11-12
海军航空大学学报(2015年3期)2015-11-11
