
简易超重和失重测量装置设计
2019-05-20 11:05张泓筠杨永亮潘金福
实验技术与管理 2019年4期
张泓筠, 杨永亮, 潘金福
(凯里学院 大数据工程学院, 贵州 凯里 556011)
物体产生竖直方向的加速运动时,对支持物或弹簧产生的压力或拉力(视重)不等于本身重力从而导致超重和失重现象[1-2],如电梯等升降机的启动和停止,人在地面上弹跳对地面产生的压力,举重、蹦床、跳伞、跳水等体育活动,载人航天器的发射与降落等。教学中分析、再现超重和失重状态虽然可用弹簧秤、台秤演示[3],但仅仅是短时间呈现状态的变化,让人总感不足; 因而实验室通常用专门的超重和失重演示器,实验效果也比较直观[4-8],但不能作为测试仪器使用。为便于量化测试,本文通过设计固-液物体系、借助液体中浮体在竖直方向受力状态和位置的改变显示超重和失重状态,并设计了超重、失重状态的简易测量方法。超重与失重相关理论和应用问题相关文献有精辟的论述[2,9-14]。
1 软硬件及装置
透明塑料瓶长为25.0 cm,直径为4.0 cm,或直接用100 mL量筒。浮体由标尺竿和悬锤组成,标尺标由粗细均匀的硬质圆木棒(质量m1,直径Φ=2.0 cm,表面刷漆,防腐、防吸水)制成,不锈钢悬锤(m0=50 g左右)。正面标尺分度按重力加速度g分刻,比如标尺上0.5应为0.5g,g单位为m/s2;背面标尺分度单位为g/cm3。装置如图1(a)所示。
电路设计用Proteus软件(用于分立电路设计)及相应分立电子元件; 单片机控制模块AT89C51或STC90C51,及相应单片机编程应用软件Keil软件和STC-ISP软件。
平衡状态:被测物体静止或处于竖直方向的匀速直线运动状态;超重状态:被测物体处于竖直向上的匀加速直线运动或向下的匀减速直线运动状态,液面所在标尺刻度大于零;失重状态:被测物体处于竖直向下的匀加速直线运动或向上的匀减速直线运动状态,液面所在标尺刻度小于零。
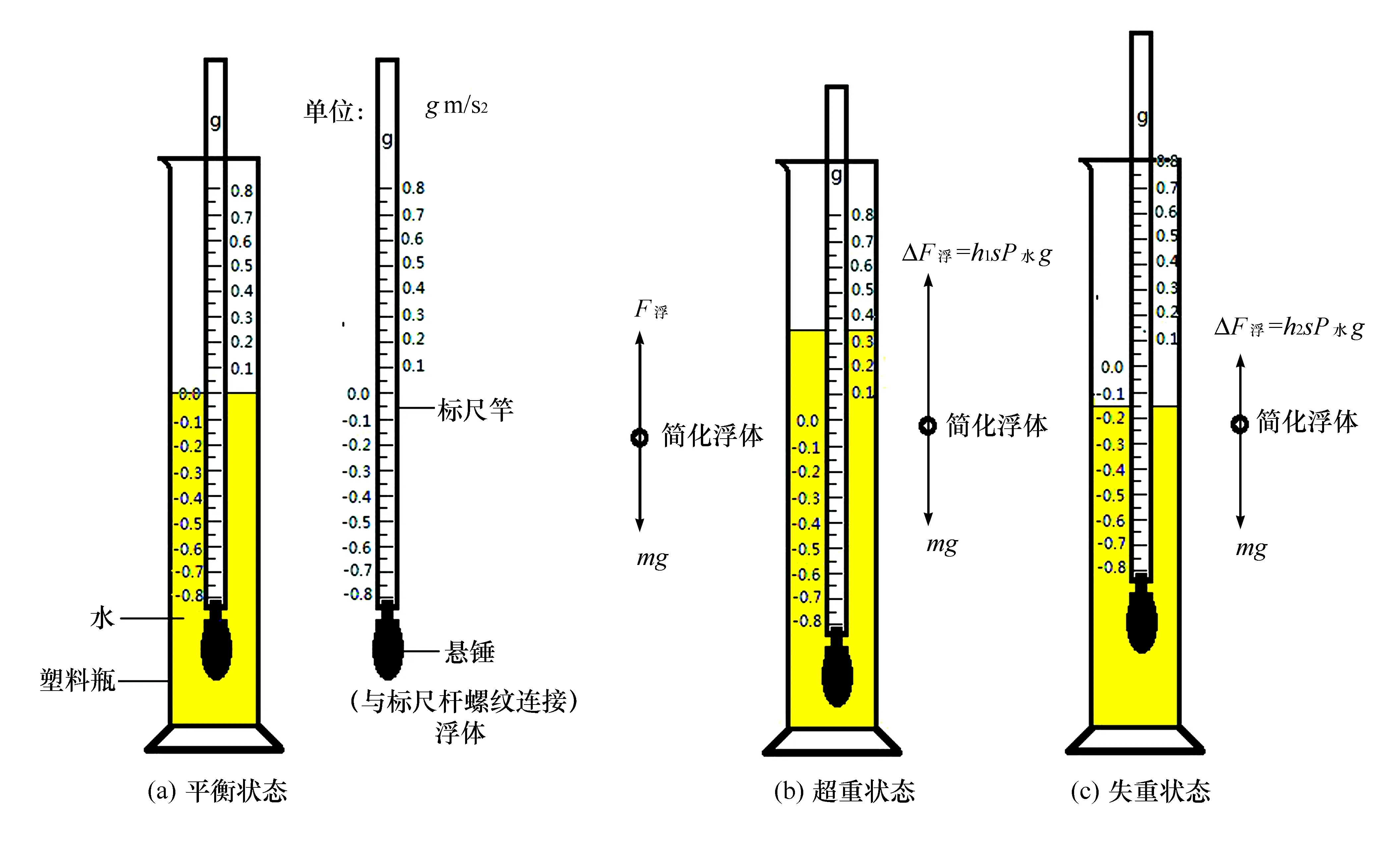
图1 超重、失重测量系统设计
2 理论依据
(1) 动力学判据:当物体在竖直方向作加速直线运动时,若物体受到的支持力(本设计为浮力)或弹簧的拉力大于重力,物体处于超重状态; 反之,物体处于失重状态[2]。
(2) 运动学判据:当物体在竖直方向作加速直线运动时(假定没有阻力等其他力作用于弹簧),若加速度向上(向上加速或向下减速),物体处于超重状态; 若加速度向下(向下加速或向上减速),物体处于失重状态[2]。
(3) 对于由不同物体组合成的物体系,若其质心的运动或受力状态发生上述变化,则物体系同样亦处于超重或失重状态。
3 设计思路
用水中的浮体所受浮力的变化显示平衡、超重与失重状态。将图1(a)所示装置置于被测液体中。
(1) 当物体在竖直方向处于静止或匀速直线运动状态时,物体受力平衡,浮力大小等于重力大小。在平衡位置,标尺杆浸入水中深度记为h0(刻度时将其标为0.0),标尺杆横截面积为S。此时有
F浮=(m1+m0)g
(1)
此浮力用标尺杆浸入的等效深度h等(将悬锤重量折算为标尺杆进入水中所受浮力)表示如下:
F浮=Sh等ρ水g
(2)
(3)
式中,ρ水为水的密度;g为重力加速度,g=9.8 m/s2。
(2) 当物体竖直向上处于匀加速或向下处于匀减速直线运动状态时(见图1(b)),物体处于超重状态,浮体在平衡基础上下沉,浮力大于浮体重力,此时浸入标尺深度为h1,增加的浮力△F浮即为浮体所受合力,假定物体向上加速度为a上,则有
ΔF浮=S(h1-h0)ρ水g
(4)
ΔF浮=(m1+m0)a上
(5)
(6)
(3) 当物体竖直向下处于匀加速直线运动状态或向上处于匀减速直线运动状态时,物体处于失重状态(图1(c)),浮体在平衡基础上上浮,浮力小于重力,此时浸入标尺深度为h2,减少的浮力△F浮即为浮体所受合力,假定物体向下加速度为a下,则有
ΔF浮=(h0-h2)Sρ水g
(7)
ΔF浮=(m1+m0)a下
(8)
(9)
4 浮体的制作
装置的核心部件是浮体,浮体由标尺杆和悬锤组成,标尺杆采用硬质乔木,与金属悬锤采用螺纹连接,通过悬锤的旋进旋出可方便调节零刻度刚好处于水面位置。
5 标度方法
标度时以标尺处在平衡态时浸入水中的实际深度h0处为0.0刻度,标度数值为标尺浸入的实际深度(h1或h2),与平衡态对应的等效深度(h等)之相对值,即h1/h等或h2/h等,正表示超重,负表示失重。
6 功能拓展及智能化设计
6.1 功能拓展
图1(a)浮体处于平衡状态时,对不同密度液体(如盐水、酒精、汽油、醋等),标尺浸入液体的深度是不一样的,液体密度与浸入深度具有一一对应关系。根据密度和深度的关系,另行在原刻度背面标度(但密度和深度关系非线性),当作液体的密度计使用(此时悬锤与标尺的连接在固定位置)。密度与深度的量化关系可描述如下:
假定悬锤的体积为V0, 质量为m0, 待测液体密度为ρx(g/cm3), 标尺横截面积为S, 质量为m1, 标尺浸入液体的深度为x, 根据受力平衡有:
(10)
(11)
6.2 智能化设计
考虑设计功能的全面性,可以将标度(非电信号)的读数与电信号的显示方式结合起来。为此原装置可增设智能化的电子处理装置,如在盛液体的塑料瓶底部可设计一感压膜,感知容器底部液体压力变化(或水深的变化)。感压膜上正反两面各镶2片电阻应变片(分别产生拉应变和压应变)并用树脂封装,采用全桥差动电桥方式(高灵敏度及温度补偿)获取压力信号的变化(图3)[15]。差动信号经放大、滤波、模数转换后再驱动显示器直接显示结果(此时压力信号要对应超重、失重信号进行转换,作为单片机的驱动和显示信号设计的依据)[16]。为便于获得较大的差动信号,塑料瓶口径设计不要太大(直径约为标尺杆直径的2倍左右),标尺杆浸入深度变化时能引起瓶中液面深度较大变化。具体各模块电路的设计有成熟的技术可参照,本文不再赘述(其中放大器、检波器、低通滤波器和模数转化器可由单片机合并实现)。尽管感压膜电路部分是基于标尺杆力学系统状态的变化而设计,但两部分各自独立完成功能,互不干扰,两部分读数可互为验证。特别是传感器电学部分有故障时,标尺力学部分不受影响,系统仍可工作。
图2 密度计使用及标尺刻度示意图,使用方法同超重失重测量,标尺刻度非均匀
图3 智能化超重、失重测量系统的设计框图
7 设计说明及评价
(1) 由于提供浮力的液体是水,密度随温度变化不大,且浮体零刻度可调,因此浮体可作为独立的部件; 若仅限于力学部分,使用时只要用一般容器盛水可取代本设计透明塑料圆筒。
(2) 由于是依靠浮力的大小变化来定量超重、失重,惯性影响较大,故不适合测量瞬时超重和失重,只能测量稳定的超重和失重(如火箭发射、电梯、飞机升降等竖直方向的匀变速运动)。
(3) 被测液体不能与浮体反应,测试后立即将浮体从液体中拿出,并用清水冲洗,然后用吸水纸擦拭,晾干后用海绵垫包扎保存。
(4) 通过浮体所受浮力来测量超重与失重,不受其他因素干扰,尤其是传统传感器因电信号的转换受电源及电器状态的干扰。
8 结语
本文将物体的运动状态转化为浮体的受力状态及水面位置的变化,浮体充当了传感器的作用,将一种非电信号转化为另一种可量化便于读数的非电信号[17],具有较强的创新性。设计的超重和失重测量仪用于检测超重和失重环境的物体运动状态或受力状态,如地面上模拟空间微重力环境,地面失重实验系统,航天员超重训练等。
猜你喜欢
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
长江科学院院报(2022年3期)2022-03-18
今日农业(2021年11期)2021-11-27
舰船科学技术(2021年12期)2021-03-29
上海船舶运输科学研究所学报(2019年1期)2019-04-19
当代陕西(2019年5期)2019-03-21
收藏界(2018年1期)2018-10-10
振动工程学报(2018年3期)2018-07-05
