
三相并网逆变器无差拍双闭环控制方法
2019-05-17 02:46肖力元张伊洁李云涛
浙江电力 2019年4期
肖力元,张伊洁,李云涛
(中国能源建设集团湖南省电力设计院有限公司,长沙 410007)
0 引言
随着煤炭、石油等传统能源储量的不断减少,电能需求量不断增加,环境保护日趋重要,光伏、风电等可再生能源的并网发电与控制技术越来越受到重视[1-4]。目前,光伏发电系统主要有独立运行和并网发电2 种模式,与独立运行相比,光伏并网发电系统具有供电可靠、输出功率稳定和投资成本低等优点,并网发电成为光伏发电的主要利用形式,故光伏并网逆变器及其控制方法成为可再生能源开发利用领域的研究热点[5-6]。
从逆变器直流侧供电形式看,光伏并网逆变器的拓扑结构分为电压源型和电流源型。电压源型逆变器的直流侧由大电容提供支撑电压,与电流源型逆变器相比具有开关频率高、重量轻、体积小等优点,并且在功率开关器件的通断过程中无需反转电压阻断能力,电压源型逆变器的主电路设计十分简单方便,故目前已应用的并网逆变器基本上都是基于电压源型[7-8]。根据控制参量的不同,电压源型逆变器的控制方法可分为输出电压反馈控制和输出电流反馈控制。对于并网逆变器而言,大电网相当于一个无穷大电源,光伏并网逆变器与大电网并联运行时,输出电压控制方法对外部环境变化响应慢、抗干扰能力弱;而输出电流控制方法具有对外部环境变化敏感、动态响应速度快的特点,故光伏并网逆变器多采用输出电流控制方法[9-10]。电压源型并网逆变器的脉冲调制技术主要有SPWM(正弦脉宽调制)和SVPWM(空间矢量脉宽调制)2 种,由于SPWM技术原理简单且容易工程实现,光伏并网逆变器通常采用SPWM 技术控制逆变器输出电流。目前,关于光伏并网逆变器研究最多的是其电流控制方法,最典型的电流控制方法有滞环控制、同步旋转坐标系下的PI 控制以及无差拍电流预测控制等[11-15]。滞环控制具有动态响应速度快、原理简单和易于实现等特点,但是其开关频率不固定,逆变器输出滤波器设计较为困难,难以保证输出电流波形质量。基于同步旋转坐标系的PI 控制方法将控制系统中的基波交流电压和电流变换为直流分量,可以实现无静差调节,但是控制系统在数学模型上存在参数相互耦合,对控制系统的动态性能产生影响,即使采用解耦控制后,由于解耦系数难以与实际运行参数一致,其解耦效果易受运行过程中的参数变化影响。并且PI 控制器的参数设计与选择要结合调试经验反复调整。静止坐标系下采用谐振控制器可以使输出电流与给定电流的相位差为零,但谐振控制器的设计不直接,同样需要要经过反复测试与调整,且在系统参数变化时存在失谐问题,导致控制效果变差。文献[16-17]采用DPC(直接功率控制),通过功率控制器的输出量直接在开关表中选择合适的电压矢量对有功和无功功率进行控制,该方法不需要对电流进行旋转变换,实现比较简单,但是因没有电流跟踪控制内环和PWM(脉冲宽度调制)模块,其输出电流的波形质量和开关频率不确定。
在当前的电流控制方法中,无差拍控制方法具有对外部干扰的快速响应特性,并且在控制过程中没有过冲和易于数字控制实现,近年来在电压源型逆变器控制中得到广泛应用[18-19]。因此,本文针对三相并网逆变器提出一种无差拍双闭环控制方法,以简化控制器参数设计和提高逆变器的抗干扰能力。仿真结果表明,并网逆变器无差拍双闭环控制方法具有良好控制精度、快速动态响应和抗干扰能力。
1 三相并网逆变器拓扑结构
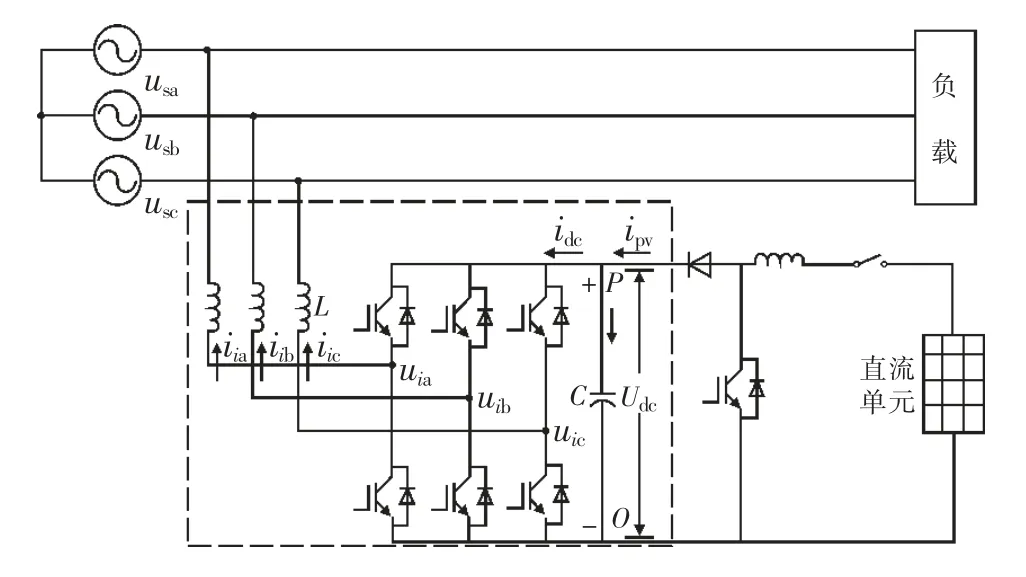
图1 三相并网逆变器拓扑结构
2 无差拍双闭环控制系统
2.1 直流侧电容电压无差拍控制器
根据电容器的电气特性,可以得到直流侧电容电压与直流电流的关系式为:

将式(1)离散化并整理后可得到:

则并网逆变器控制系统中瞬时电流控制器的输入功率参考值P*(k)为:

根据同步旋转坐标系下三相交流电瞬时功率计算式,可以得到:

式中:usd为三相交流电压us在d 轴上的分量;icd为三相交流电流在d 轴上的分量。
由式(4)可以得到同步旋转坐标系下并网逆变器交流侧输出电流的有功分量为:

将式(3)代入式(5)可以得到直流侧电容电压无差拍控制器的表达式为:

2.2 瞬时电流无差拍控制器
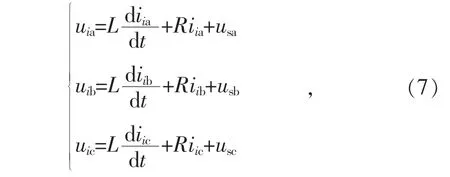
根据基尔霍夫电压定律和图1 可以得到并网逆变器的三相电压方程组为:
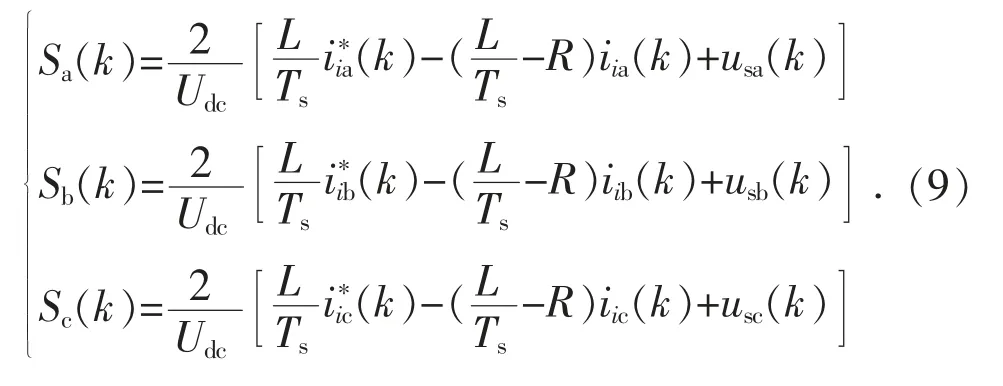
现定义并网逆变器中IGBT(绝缘栅双极型晶体管)的开关函数为:

则根据式(7)可以得到并网逆变器的瞬时电流无差拍控制算法为:
2.3 无差拍双闭环控制系统的稳定性分析
图2(a)为并网逆变器无差拍双闭环控制系统原理。由于并网逆变器通常都基于28x 系列DSP控制芯片设计控制器,其工作频率大于100 MHz,即DSP 的指令周期T 约为7.7 ns。而基于DSP 控制芯片的并网逆变器控制系统的采样频率和PWM载波频率约为5~10 kHz,即采样间隔Ts约为100~200 μs;数字控制系统的延时Td通常为指令周期T 的几十倍,即控制系统延时Td约为8~15 μs。因此,控制系统延时Td远小于采样间隔时间Ts,控制系统延时Td可以被忽略,本文所提控制方法的原理图可以等效为图2(b)。
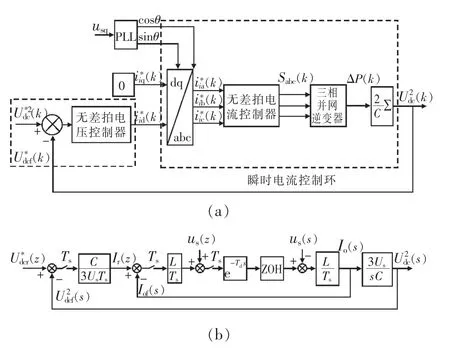
图2 并网逆变器无差拍双闭环控制系统原理
图中,Td为变流器数字控制系统产生的延时,ZOH 为零阶保持器,其数学表达式为:

式中:s 为复频率;Ts为数字控制系统中的AD采样时间。
设数字控制系统产生的延时时间Td与AD采样时间Ts的比值为kd,即kd=Td/Ts,在一个电周期内有us(z)≈us(s),根据图2(b)可得双重无差拍环控制系统的闭环脉冲传递函数为:

根据式(12)和劳思判据可知,无差拍双闭环控制系统稳定的充分必要条件为:

并网逆变器数字控制系统中kd=Td/Ts<0.1,故无差拍双闭环控制系统是稳定的。
3 直流升压电路及其控制器
为分析本文所提并网逆变器控制方法的有效性,并网逆变器的前级BOOST 电路采用图1 所示拓扑结构。当并网逆变器的控制器外环以直流侧电容电压为控制目标时,BOOST 电路可以作为功率传输电路。本文采用爬山法实现光伏电池的最大功率输出跟踪控制,最大功率跟踪控制算法的输出值作为BOOST 电路功率控制器的参考值直流升压电路功率控制的原理框图如图3 所示。
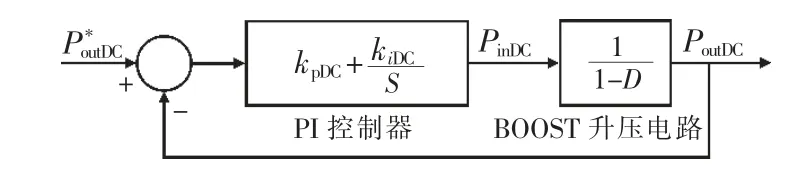
图3 直流升压电路的功率控制原理框图
由于BOOST 升压电路的输出电压Udc与输入电压UPV的关系式为:

式(14)两边同乘以直流输出电流可以得到:

对于直流量采用PI 控制即可实现零静态误差控制,根据图4 可以得到直流升压电路功率控制的闭环传递函数为:

式中的调制比D 满足0<D<1,为保证PI 控制器对调制比D 有较大有效调节范围,在设计PI 控制器参数时取D=0.5,BOOST 升压电路功率控制器中比例、积分参数的具体设计可以参照文献[21]。
4 仿真分析
为验证本文所提控制方法的有效性,在PSIM9.0 仿真软件中搭建了图1、图2 和图3 所示并网逆变器及其控制系统的仿真模型。仿真模型参数如表1 所示。BOOST 升压电路功率控制器的比例系数Kp为3.5,积分系数Ki为27.84。

表1 并网逆变器的主要参数
仿真方案1:设定光伏电池的最大输出功率为20 kW,负载为7.26 Ω。仿真开始时,系统带负载运行,在0.04 s 时投入光伏并网逆变器。仿真结果如图4 和图5 所示。
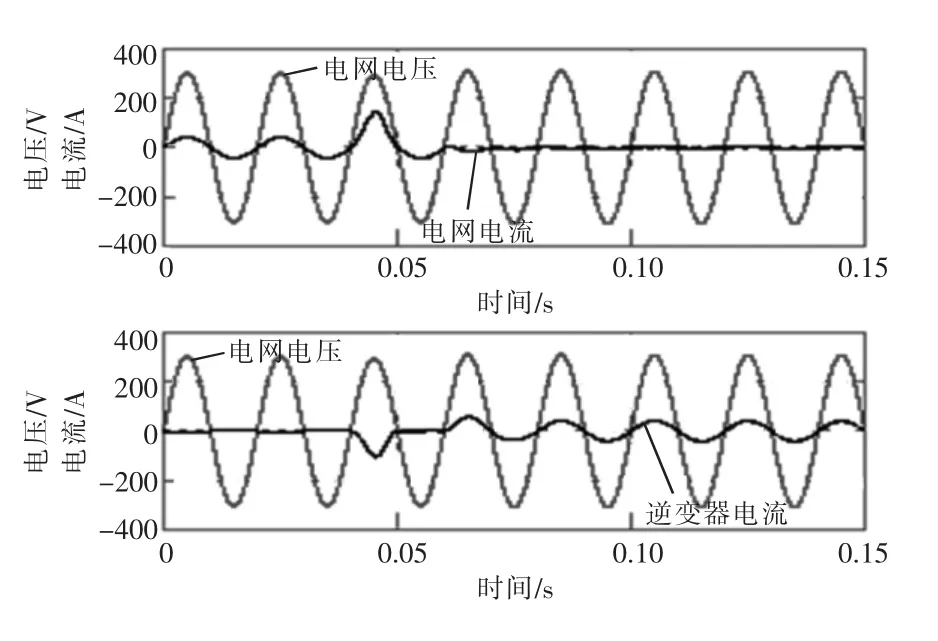
图4 A 相电网电压与电网电流、逆变器输出电流波形
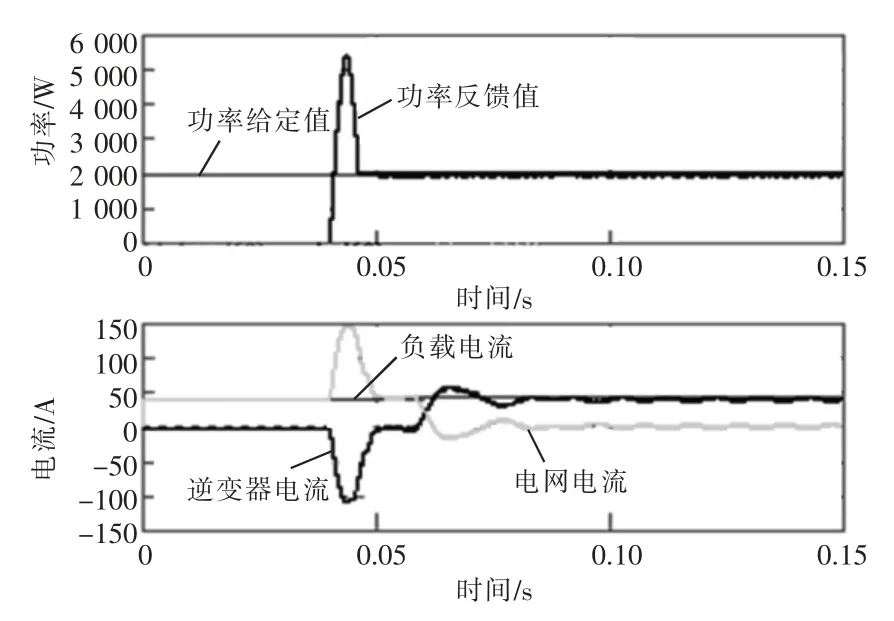
图5 负载、电网和逆变器有功电流、功率给定与反馈值
从图4 可以看出,光伏并网逆变器投入运行后,负载从电网吸取的电流迅速变小,只需1 个电周期即达到稳态工作状态;并且并网逆变器的输出功率因数近似为1。 从图5 可以看出,在0.04 s 之后,负载有功电流完全由电网提供,约为42 A;并网稳定后,电网有功电流降为0 A,而并网逆变器输出的有功电流约为42 A,即负载完全由并网逆变器供电。
仿真方案2:在光伏并网逆变器投入运行并达到稳态工作状态后,假定光伏电池组的输出电压因环境变化产生突变,在0.2 s 时Upv从150 V 阶跃到480 V,仿真结果如图6 和图7 所示。
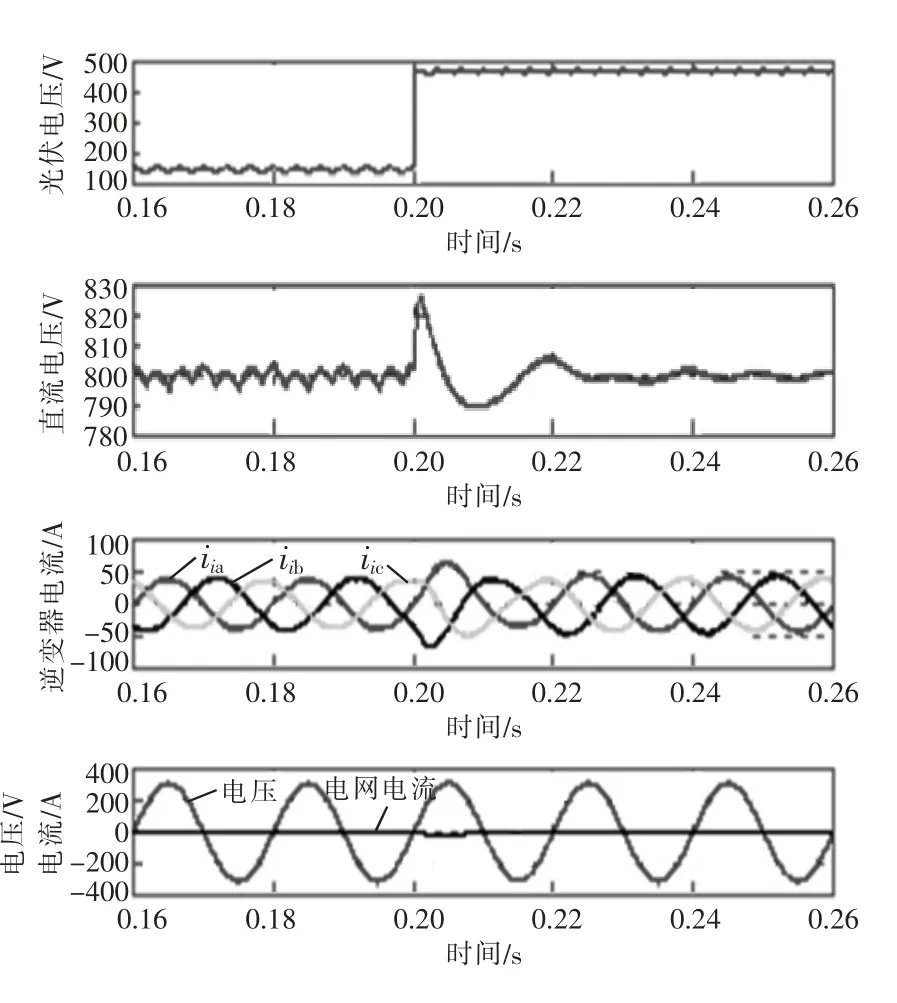
图6 直流单元电压Upv 突变时的相关参数波形
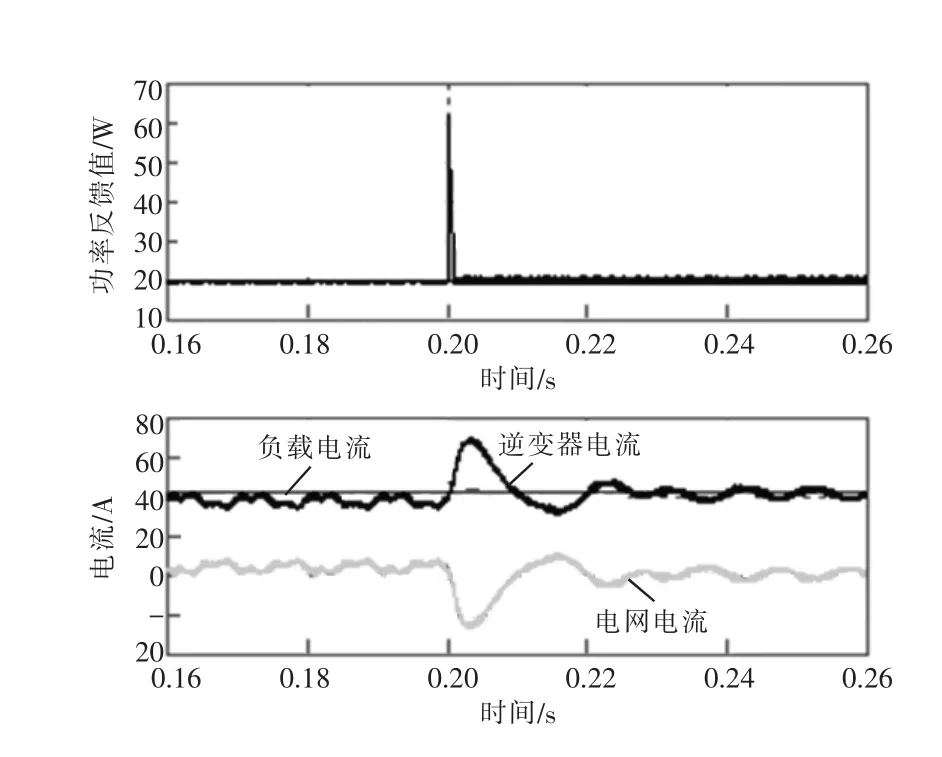
图7 直流单元电压Upv 突变时功率与有功电流波形
由图6 和图7 可知,光伏电池输出电压Upv从150 V 阶跃到480 V 后,并网逆变器直流侧电容电压、逆变器三相输出电流、输出有功功率与有功电流等参数仅需1 个电周期即可达到稳定状态。表明本文所提控制方法具有快速动态响应性能和抗干扰能力,并能实现零稳态误差。
5 结语
为简化光伏并网逆变器的控制器参数设计,提高光伏并网逆变器的动态响应特性和抗干扰能力,本文提出了用于光伏并网逆变器的无差拍双闭环控制方法,仿真结果验证了所提方法的可行性。该控制方法具有以下特点:控制器参数可以由电路元器件参数和电压回路方程直接计算得到;控制算法属于离散函数形式,数字控制系统的工程易于实现;控制方法具有良好的动态响应速度、抗干扰能力和稳定控制精度。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
北京航空航天大学学报(2022年5期)2022-06-06
宁夏电力(2022年1期)2022-04-29
煤气与热力(2021年12期)2022-01-19
电子制作(2019年13期)2020-01-14
电子制作(2018年11期)2018-08-04
电子制作(2018年8期)2018-06-26
电脑知识与技术(2016年18期)2016-11-02
大学教育(2016年7期)2016-07-27
海峡科技与产业(2016年3期)2016-05-17
