
IPMC驱动柔性机器鱼速度控制系统
2019-05-17 07:41常龙飞李超群牛清正胡小品何青松吴玉程
水下无人系统学报 2019年2期
常龙飞, 李超群, 牛清正, 杨 倩, 胡小品, 何青松, 吴玉程,3,4
IPMC驱动柔性机器鱼速度控制系统
常龙飞1, 李超群1, 牛清正1, 杨 倩1, 胡小品1, 何青松2, 吴玉程1,3,4
(1. 合肥工业大学 工业与装备技术研究院, 安徽 合肥, 230009; 2. 南京航空航天大学 江苏省仿生功能材料重点实验室, 江苏 南京, 210016; 3. 合肥工业大学 材料学院, 安徽 合肥, 230009; 4. 合肥工业大学 先进功能材料与器件安徽省重点实验室, 安徽 合肥, 230009)
柔性机器鱼; 离子聚合物金属复合材料; 闭环控制; 速度反馈
0 引言
机器人给人类的生产生活带来了极大的便利。随着科学技术的发展, 机器人的应用愈加广泛。由于其工作环境日益复杂, 传统刚性机器人受自身刚性机械结构的限制, 难以满足一些特殊环境的工作(例如狭小空间、水下环境等)需求。而柔性机器人凭借对外部环境适应能力强、结构简单等优势成为机器人发展的重要方向之一[1-3]。柔性机器鱼作为柔性机器人中的一类, 具有可观的应用前景, 引起了国内外学者的争相研究[4-5]。电致动聚合物(electroactive polymer, EAP)作为一种新型柔性智能材料, 为柔性机器鱼的设计开发提供了重要技术基础。特别是离子型EAP材料, 如离子聚合物金属复合材料(ionic polymer-metal composite, IPMC)[6], 导电聚合物(conducting po- lymer, CP)[7], 巴基凝胶[8]和离子凝胶(ionic gels, IG)[9]等, 可在低电压下(1~10 V)产生大的柔性变形, 柔韧性好, 且其内部为液固二相组合, 材料可适应液体环境工作, 因此在设计柔性水下机器人方向具有突出的优势[10-11]。其中, 对于IPMC材料的研究最早也最为成熟。
目前, 国内外对IPMC驱动的柔性机器鱼已有一定的研究基础, 研究内容由IPMC致动器驱动特性[12]逐步深入到关于IPMC驱动器的理论分析[13-14]和IPMC驱动的水下柔性机器人[15]。Mojarrad等[16]率先开发出蝌蚪形状单片矩形IPMC驱动的柔性机器鱼, 随后, Byungkyu[17]设计出结构与之类似外观更为精美的机器鱼, 总长为96 mm, 质量仅为16.2 g, 游动速度最快可达23.6 mm/s; Guo[18]、Ye[19]、Aureli[20]、Shen[21]等对柔性机器鱼驱动器的结构进行了改变, 在矩形IPMC的末端连接一片鱼尾鳍形状的聚氯乙烯薄膜, 通过IPMC的弯曲带动尾鳍状薄膜推进机器鱼游动; Guo[22]、苏玉东[23]、Hubbard[24]等在柔性机器鱼单独尾部驱动器的基础上在鱼体两侧增加胸鳍驱动器, 实现了柔性机器鱼的多方向游动。除此之外还有其他结构的柔性机器鱼, 如仿鳐鱼[25-26]、仿水母[27-28]、仿蛇形[29]等。上述基于IPMC的水下机器鱼均没有涉及到对机器鱼的运动控制, 仅以预设的电压信号驱动IPMC材料摆动, 从而使机器鱼游动。其行进速度很难掌控, 在实际应用中有很大的局限性。Mojarrad[16]、Guo[30]等研发的柔性机器鱼采取了简单的开环控制, 可以实现一维线性游动。在此基础上, Tan等[31]研发的自主仿生机器鱼搭载了全球定位系统(global positioning system, GPS)、ZigBee等模块, 可以实现机器鱼的自主导航和游动以及与外界的信息通信, 功能较为完善。2013年, Shen等[32]结合IPMC尾部的流体动力学和驱动动力学对柔性机器鱼进行物理建模分析, 并采用比例-积分-微分(proportion integration differentiation, PID)反馈控制方法调节驱动信号的幅值和频率, 提高了机器鱼的游动性能和IPMC驱动器的推进效率。这些少有的控制研究虽然实现了对机器鱼的运动控制但是都依托于外部固定的实验装置或传感仪器, 尚未实现机器鱼的独立运动反馈及控制。
在机器鱼的实际应用中, 实现独立的速度控制至关重要。然而到目前为止, 由于速度参数难以获取, IPMC驱动器产生推力或变形位移与机器鱼游速难以形成确定的对应关系, 基于IPMC的机器鱼控制系统以及游动参数调控仍鲜有研究, 少数工作仅仅是基于理论仿真或者要利用外接仪器和传感器[32-33]。Shen等[32]通过建模理论推导出机器鱼游动速度和驱动信号幅值及频率之间的关系, 并搭建反馈控制系统实时调节幅值和频率, 从而使机器鱼在运动中保持较高的游动效率, 但是由于机器鱼的游动速度参数较难获得, 所以控制系统并未对游动速度反馈调节。Rosly等[33]通过在机器鱼机体上安装惯性测量单元, 实现了对游动速度的闭环控制, 由于系统的微控制器体积较大, 所以控制系统并未完全集成于机器鱼机体内, 还需要与固定于外部的微控制器连接, 文章验证了闭环控制对速度调节的可行性, 但是并未实现机器鱼整体的独立运动。
PID控制器作为最早实用化的控制器已有近百年历史, 现在仍然是最为经典和应用最广泛的工业控制器。具有结构简单、稳定性好、工作可靠、容易操作、使用中不需精确的系统模型等优点, 对于精确系统模型很难获取的IPMC型机器鱼的速度控制极为适合。基于此, 文中设计了一种PID反馈控制系统, 使用MPU6050陀螺仪实时计算机器鱼的游动速度作为反馈参数, 通过改变驱动信号的频率从而实现了控制机器鱼按预设速度游动。研究成果将对该类柔性水下机器鱼的控制提供重要的理论和实验依据。
1 IPMC驱动机器鱼结构
目前, IPMC驱动机器鱼的推进方式主要有身体/尾鳍(body and/or caudal fin, BCF)推进模式、中央鳍/对鳍(median and/or paired fin, MPF)模式和混合鳍推进模式[34]。其中, BCF推进模式主要借助鱼体波动或尾鳍摆动运动提供推进力, MPF推进模式以胸鳍或腹鳍力为推进力的主要来源, 混合鳍推进模式是以上两者的综合。综合对比现有不同推进方式IPMC驱动的机器鱼, BCF推进模式的机器鱼[17-18, 22-24]能够实现较高的游速, 且游动能力范围分布较广(0.016~0.526 BL/s), 而MPF推进模式的机器鱼[25-26]游动能力相对较差, 但是具有较高的机动性和游动效率。由于IPMC材料自身特性的影响, 致使尾鳍加胸鳍式驱动结构较单尾鳍式驱动结构的控制系统复杂度大为提升。文中主要研究对机器鱼游动速度的反馈控制, 故机器鱼结构设计采用BCF推进模式, 使用单片尾鳍推进, 机器鱼总长度15.4 cm, 其中鱼体长8.4 cm, 宽4.9 cm, 总质量42.7 g。
1.1 IPMC驱动器
如前所述, IPMC是一种离子型EAP材料。在0.5~10 V电压作用下, 其内部离子和溶剂会产生定向移向, 内部质量的不平衡分布会进而使其在宏观上产生厘米级弯曲变形, 如图1所示。作者在前期的实验中发现, 对悬臂梁固定方式下的IPMC施加方波电压信号在水环境中摆动时, IPMC摆动幅度随着样片宽度的增加而降低, 阻滞力随着宽度的增加而增加; 当宽度过宽时, 矩形IPMC沿宽度方向也会产生弯曲变形, 从而削弱了沿长度方向的弯曲变形幅度。综合考虑, 文中在设计IPMC驱动器时, 根据经验, 材料尺寸取60 mm×7 mm, 尾部固定夹持长度为10 mm。

图1 离子聚合物金属复合材料功能特性
1.2 驱动器模型分析

图2 IPMC悬臂梁模型
由文献[32]可知, 柔性机器鱼的IPMC尾部驱动器所产生的平均推进力为

为了确定闭环控制系统电压驱动信号的具体参数, 设计了柔性机器鱼模型, 将模型放于玻璃水箱中, 在水箱底部放置坐标纸, 并将摄像机置于水箱的正上方以测量模型的游动速度。具体测量装置如图3所示。
采用数字源表提供驱动电压, 测试了不同电压(2.5 V、3.3 V、4 V)、不同频率下的游动速度, 如图4所示。同一电压下, 随着频率的增加游动速度先增大后减小, 同一频率下, 游动速度随着电压的增大而增大(由于水解作用, 电压存在上限, 通常不应高于4 V)。
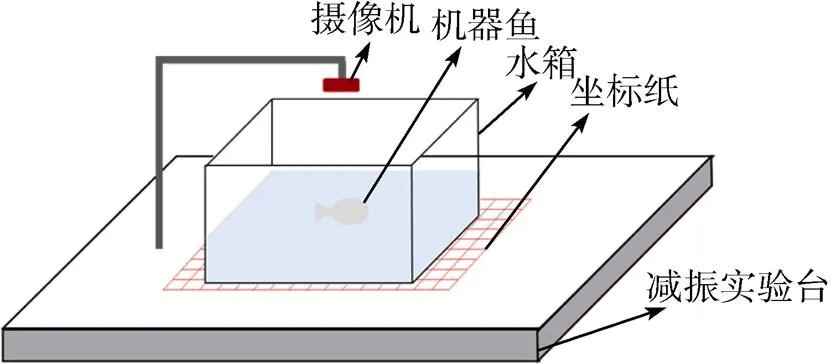
图3 机器鱼速度测量装置
Figure. 4 Swimming speed of a robotic fish at different voltages and frequencies
4 V电压下机器鱼的游动速度最快, 可达到15 mm/s, 但此时由于电解作用, IPMC驱动器表面有明显的气泡产生, 故闭环控制驱动信号电压采用3.3 V, 为提高模型的准确性, 将3.3 V电压下的频率与速度关系增加为13个数据点。Chen[13]根据莱特希尔细长体推进理论与IPMC梁模型理论, 建立机器鱼的物理模型, 利用该物理模型对实验数据进行验证, 确保实验数据的准确性及实验环境对机器鱼游动速度的影响在误差范围内。
采用3次多项式模型
对3.3 V电压下频率-速度数据进行曲线拟合, 结果如图5所示, 拟合度因子2为0.989 3, 与式(4)相比具有良好的准确性, 并验证了上述3次多项式模型的可靠性。后文将采用该函数模型设计PID控制电路。
2 控制系统
2.1 PID反馈系统搭建

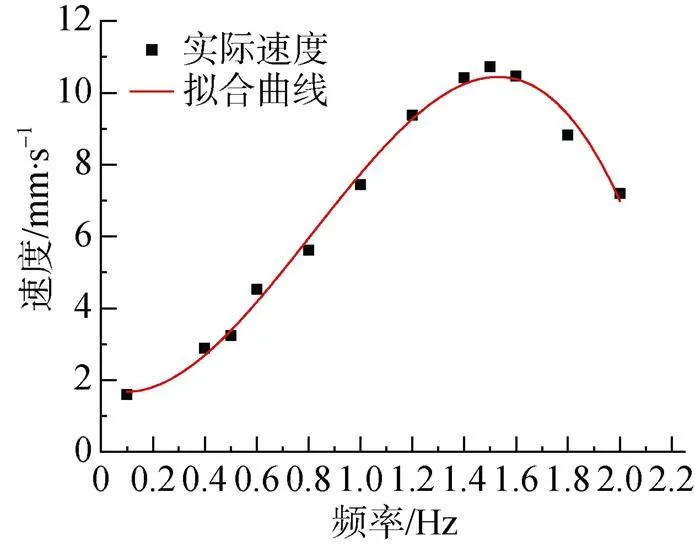
图5 速度拟合曲线
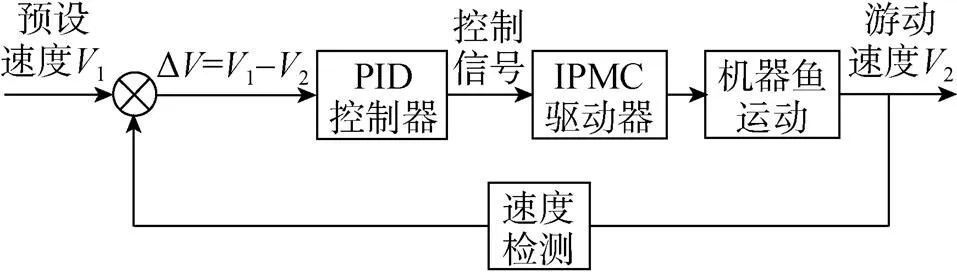
图6 闭环速度控制原理图
现有关于IPMC驱动机器鱼的控制研究中, 控制变量通常是与机体成固定角度安装的IPMC驱动器的摆动频率[32]。在文中的PID控制器中, 方波电压幅值固定在3.3 V, 通过改变频率来达到所需的速度。PID控制器的离散化表达为



根据式(5)、(6)和式(9)可以确定预设速度下所对应的频率, 并通过对比预设速度与实际速度之间的差值来调节频率,从而控制机器鱼按照预设速度游动。
以图5中的函数拟合模型为基础, 在MATLAB软件中搭建Simulink控制仿真模型, 如图7所示。以正弦函数代表变化的预设速度作为模型输入进行系统仿真, 对比输出信号与输入信号之间波形及相位之间的差别。
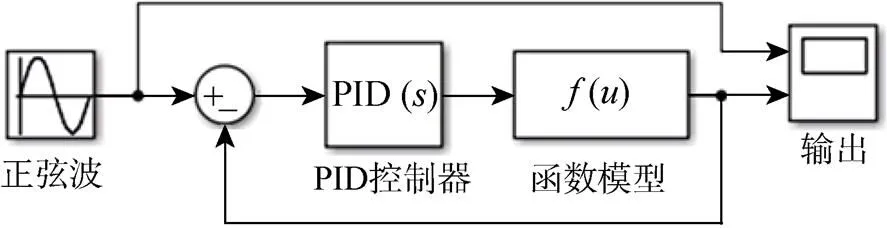
图7 闭环速度控制Simulink模型
在MATLAB软件中的PID TUNER窗口界面里调节Response Time和Transient Behavior 2个参数值, 从而获得一个较好的PID单位阶跃响应曲线; 在文中, 2个参数分别取为0.348 9和0.39, 与之对应的PID控制器参数为: 比例增益系数k=11.94、微分增益系数k=4.79、积分增益系数k=5.732。
在上述参数下, 系统仿真结果如图8所示。图8(a)为PID闭环控制系统阶跃响应曲线, 当输入速度信号为6 mm/s时, PID闭环控制系统超调量约为23.3%, 系统达到稳定时间较短, 约为0.5 s, 且稳定之后系统的稳态误差较小。图8(b)为模拟PID闭环控制系统的跟随特性, 其中位于上侧的波形为系统输入信号, 代表预设游动速度1, 位于下侧的波形为系统输出信号, 代表实际游动速度2, 可以看出1和2在波形上具有很好的一致性,2较1在相位上约有0.3 s的延迟, 为系统正常响应时间。该模型能很好的满足控制系统要求。
2.2 速度测量单元
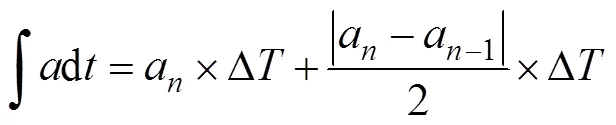
文中选用MPU6050传感器来测量机器鱼的游动速度。MPU6050是一款6轴运动处理组件, 包括三轴陀螺仪和三轴加速度计。由于机器鱼仅在水平面上游动, 并未涉及到下潜和上浮动作, 故只采用、两轴的测量数据。MPU6050传感器加速度计对机器鱼游动时的加速度较为敏感, 而利用陀螺仪积分计算角度时不受游动加速度影响, 但随着时间的增加, 积分漂移和温度漂移带来的误差较大。故在计算角度时采用互补滤波的方法以弥补2个传感器相互的不足, 即短时间内以陀螺仪采样值计算出的角度为准, 定时以加速度计采样值计算出的角度对陀螺仪得到的角度进行校准。加速度测量量程选用±2g, 此量程下传感器灵敏度为16 384 LSB/g, 采样频率为125 Hz。在测量之前, 首先对陀螺仪进行校准, 排除系统自身对测量值的影响, 将陀螺仪敏感轴水平放置时的读数取平均值作为陀螺仪的零点偏移值。三轴陀螺仪响应快, 由于温度漂移和零点漂移导致低频信号较差故采用高通滤波器滤除其低频信号, 加速度计测量倾角时动态响应较慢, 故采用低通滤波抑制其高频信号。将传感器通过互补滤波处理过的有效数据进行求积分运算, 便可得到机器鱼的实际运动速度和角度, 其具体计算方式为
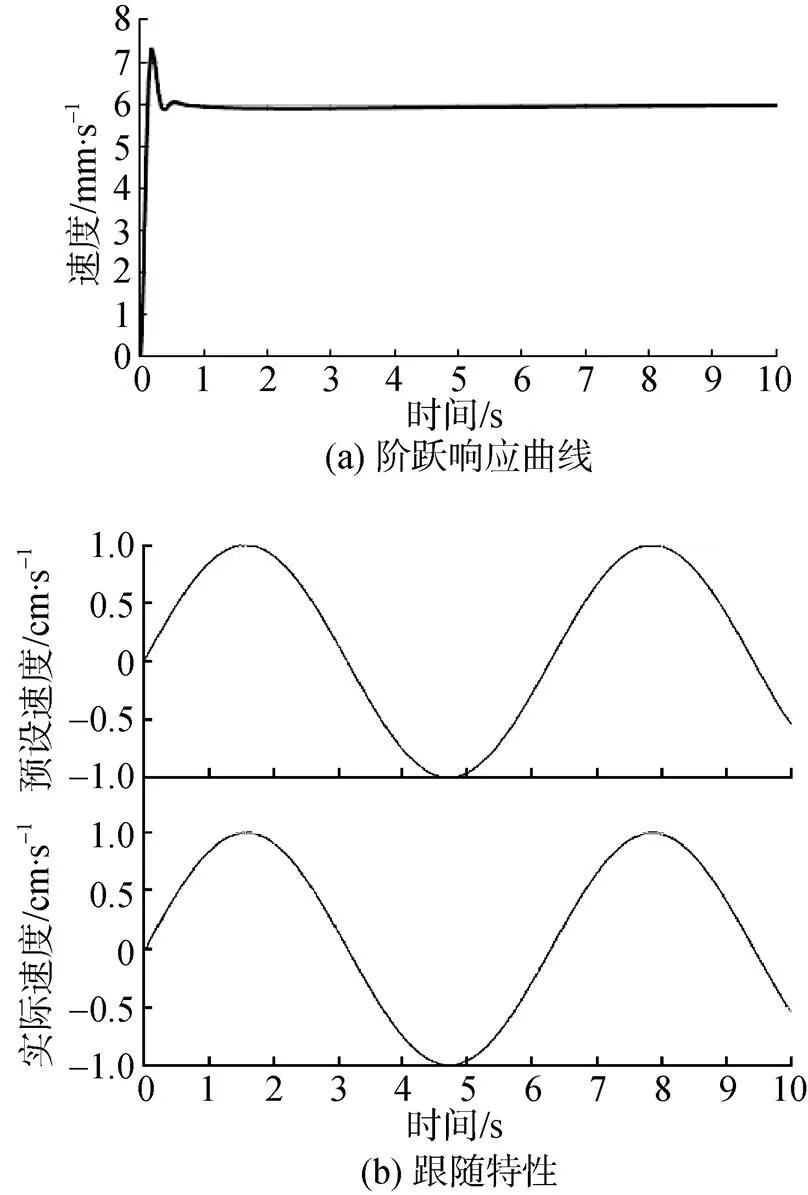
图8 比例-积分-微分(PID)闭环控制统仿真结果



2.3 控制电路
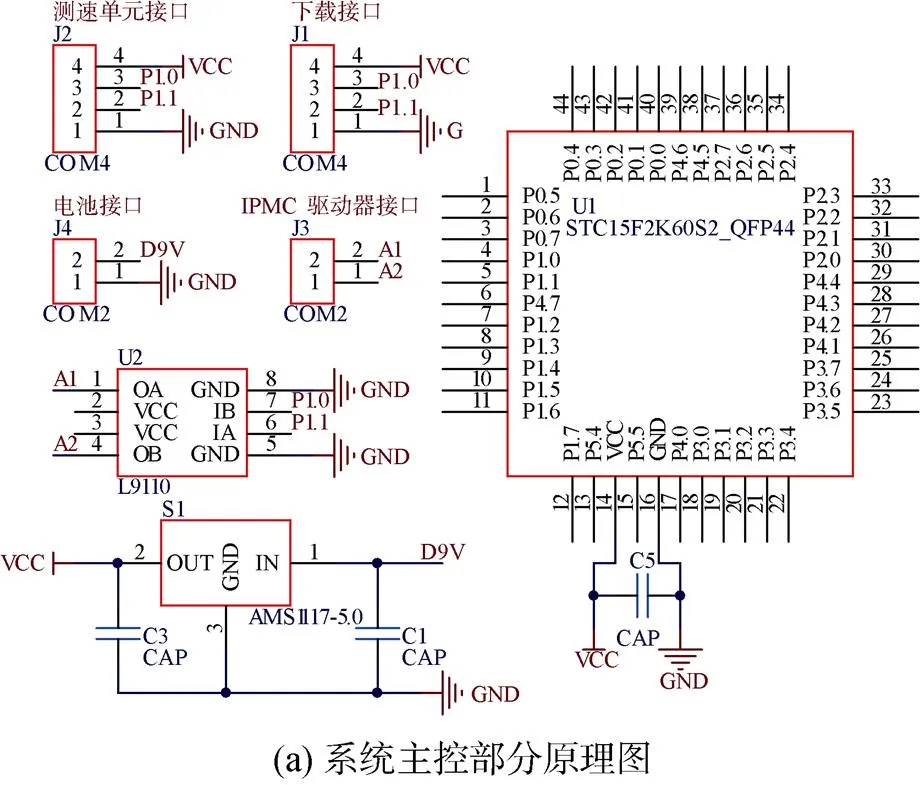
在上述实验结果的基础上设计控制电路, 印制电路板(printed circuit board, PCB)电路主要由稳压模块、微控制单元(microcontroller unit, MCU)模块、驱动模块、测速模块、程序下载模块和集成电路总线(inter-integrated circuit, IIC)模块等组成, 具体如图9所示, 其中图9(a)为系统主控部分原理图, 图9(b)为控制系统PCB电路。采用2块3.7 V锂电池串联供电, 经稳压后分别供给MCU模块(型号STC15F2K60S2)和驱动模块(型号L9110); 测速模块通过IIC总线协议与MCU通信, 驱动模块输出幅值3.3 V频率可调的方波电压信号, 由测试程序下载模块将驱动程序烧录到MCU中, 经测试该电路能很好的实现预设功能。
在硬件电路的基础上根据上述实验及仿真获得的拟合多项式和PID控制器参数, 设计机器鱼驱动程序, 控制程序采用C语言编写, 由3个主要部分组成: 主程序、PID算法程序和传感器采集程序。主程序主要对函数、参数、变量等进行定义, 以及系统的基本输入输出和延时程序等; PID算法程序是将PID反馈系统编写为程序C代码, 包含速度比较、频率调节和微分积分等; 传感器采集程序则是关于陀螺仪的参数配置、采集数据的滤波处理、调用和计算等。通过Keil编写控制并使用STC-ISP软件将编写好的程序烧录进MCU, 以备制作机器鱼样机时使用。
3 柔性机器鱼原型及实验
机器人壳体在solidworks软件中设计完成后, 使用聚乳酸材料直接3D打印而成; 将PCB电路与IPMC驱动器安装到3D打印的壳体上, 如图10所示。驱动器与壳体连接处采用防水胶带密封, 且壳体内部设计有防水隔板, 以防止机器鱼在游动时水渗入到电子器件内。机器鱼长15.4 cm, 其中鱼体长8.4 cm, 宽4.9 cm, 总质量42.7 g。为了避免机器鱼在运动时受到外力影响, 致使实验结果不准确, 测量机器鱼游动速度时采用摄像机拍摄视频的方式, 通过对视频的数据处理, 从而得到机器鱼游动的速度, 进行实验验证。
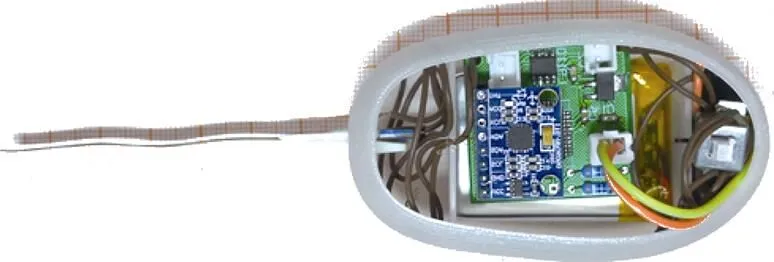
图10 柔性机器鱼

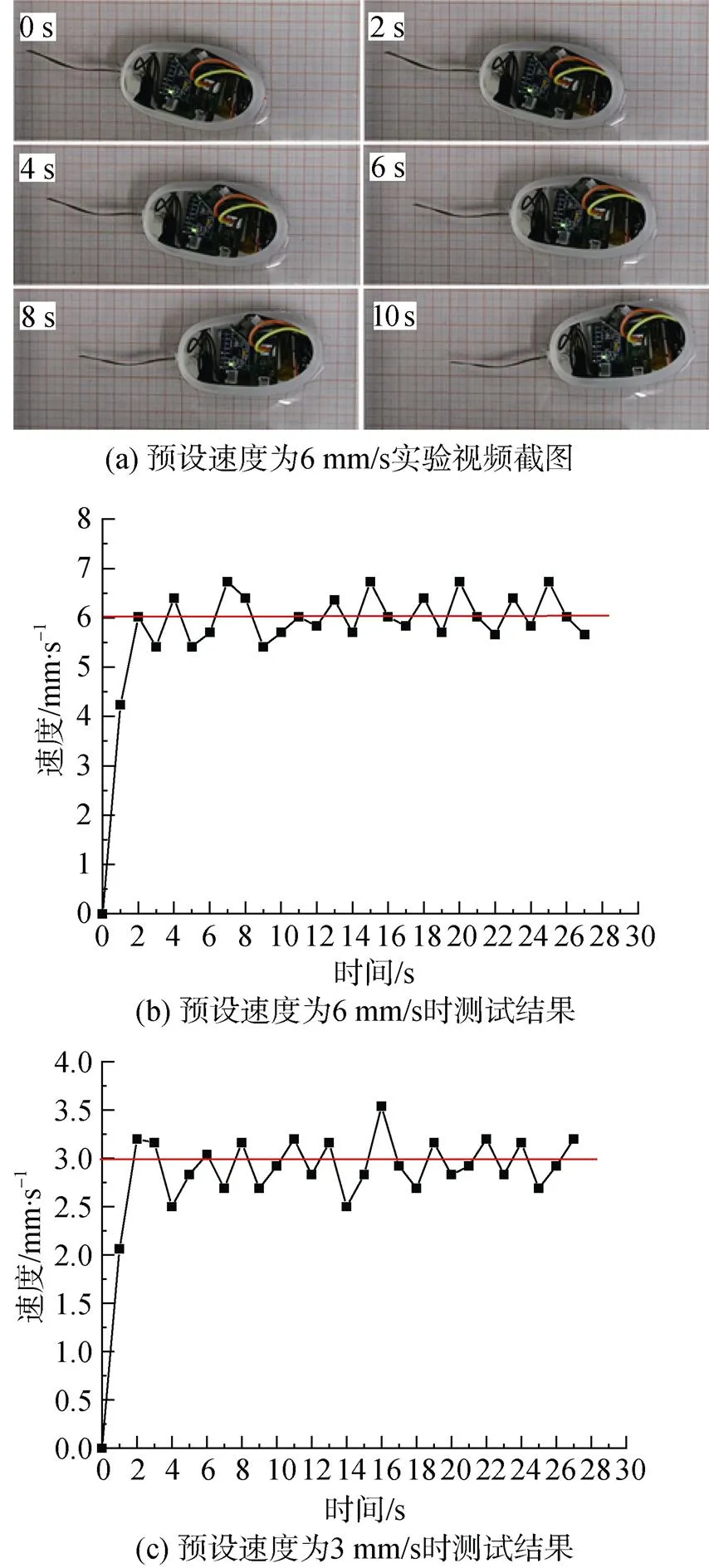
图11 机器鱼游动速度测试结果
4 结束语
文中在机器鱼游动模型的基础上, 设计了针对IPMC驱动的机器鱼PID闭环反馈控制系统, 选用MPU6050陀螺仪, 无需外接测试仪器, 可以实现机器鱼独立游动时的速度控制。以预设速度作为控制系统的输入, 实际速度作为控制系统的输出, 预设速度与实际速度之间的差值作为PID控制器的输入, 通过调节驱动信号的频率, 从而实现控制机器鱼按照预设速度运动。利用MATLAB/Simulink对控制系统进行了仿真, 使用STC15单片机、MPU6050陀螺仪等电子器件制作了PCB电路, 设计制作了机器鱼样机并进行了实验, 实验结果表明: 在PID闭环反馈控制的调节下, 机器鱼可以快速达到预设速度并且很好地按照预设速度游动。文中研究过程中机器鱼采用单尾鳍驱动结构, 在游动过程中前进方向易受到干扰, 在后续工作中将研究胸鳍和尾鳍混合驱动下的速度控制、不同驱动信号波形对速度控制系统精度的影响等。
[1] Rus D, Tolley M T. Design, Fabrication and Control of Soft Robots[J]. Nature, 2015, 521(7553): 467-475.
[2] Kim S, Laschi C, Trimmer B. Soft Robotics: a Bioinspired Evolution in Robotics[J]. Trends in Biotechnology, 2013, 31(5): 287.
[3] Deepak T, Christopher D R, William M K, et al. Soft Robotics: Biological Inspiration, State of the Art, and Future Research[J]. Applied Bionics & Biomechanics, 2014, 5(3): 99-117.
[4] Chu W S, Lee K T, Song S H, et al. Review of Biomimetic Underwater Robots Using Smart Actuators[J]. International Journal of Precision Engineering & Manufacturing, 2012, 13(7): 1281-1292.
[5] 李铁风, 李国瑞, 梁艺鸣, 等. 软体机器人结构机理与驱动材料研究综述[J]. 力学学报, 2016, 48(4): 756-766.
Li Tie-feng, Li Guo-rui, Liang Yi-ming, et al. Research Review of Structural Mechanism and Driving Materials of Software Robots[J]. Journal of Mechanics, 2016, 48(4): 756-766.
[6] Asaka K, Oguro K, Nishimura Y, et al. Bending of Polyelectrolyte Membraneplatinum Composites by Electric Stimuli I. Response Characteristics to Various Waveforms[J]. Polymer Journal, 1995, 27: 436-440.
[7] Baughman R H. Conducting Polymer Artificial Muscles[J]. Synthetic Metals, 1996, 78: 339-353.
[8] Fukushima T, Asaka K, Kosaka A, et al. Fully Plastic Actuator through Layer-By-Layer Casting With Ionic-Liquid-Based Bucky Gel[J]. Angewandte Chemie-International Edition, 2005, 44(16): 2410-2413.
[9] Tanaka T, Nishio I, Sun S T, et al. Collapse of Gels in an Electric Field[J]. Science, 1982, 218(4571): 467-469.
[10] Kalia S, Avérous L. Biopolymers: Biomedical and Environmental Applications[M]. USA: Wiley, 2011.
[11] Shahinpoor M. Potential Applications of Electroactive Polymer Sensors and Actuators in MEMS Technologies[J]. Proceedings of SPIE-the International Society for Optical Engineering, 2001, 4234: 203-214.
[12] Jung K, Nam J, Choi H. Investigations on Actuation Characteristics of IPMC Artificial Muscle Actuator[J]. Sensors & Actuators A Physical, 2003, 107(2): 183-192.
[13] Chen Z, Shatara S, Tan X. Modeling of Biomimetic Robotic Fish Propelled by An Ionic Polymer-Metal Composite Caudal Fin[J]. IEEE/ASME Transactions on Mechatronics, 2009, 15(3): 448-459.
[14] Mbemmo E, Chen Z, Shatara S, et al. Modeling of Biomimetic Robotic Fish Propelled by an Ionic Polymer-metal Composite Actuator[C]//IEEE International Conference on Robotics and Automation. Pasadena, CA, USA: IEEE, 2008: 689-694.
[15] Chen Z. A Review on Robotic Fish Enabled by Ionic Polymer-metal Composite Artificial Muscles[J]. Robotics & Biomimetics, 2017, 4(1): 24.
[16] Mojarrad M, Shahinpoor M. Biomimetic Robotic Propulsion Using Polymeric Artificial Muscles[C]//IEEE International Conference on Robotics and Automation. Albuquerque, NM, USA: IEEE, 1997: 2152-2157.
[17] Byungkyu K, Deok-Ho K, Jaehoon J, et al. A Biomimetic Undulatory Tadpole Robot Using Ionic Polymer Metal Composite Actuators[J]. Smart Materials & Structures, 2005, 14(6): 1-7.
[18] Guo S, Ge Y, Li L, et al. Underwater Swimming Micro Robot Using IPMC Actuator[C]//IEEE International Conference on Mechatronics and Automation. Luoyang, Henan, China: IEEE, 2006: 249-254.
[19] Ye X, Su Y, Guo S. A Centimeter-scale Autonomous Robotic Fish Actuated by IPMC Actuator[C]//IEEE International Conference on Robotics and Biomimetics. Sanya, China: IEEE, 2007: 262-267.
[20] Aureli M, Kopman V, Porfiri M. Free-Locomotion of Underwater Vehicles Actuated by Ionic Polymer Metal Composites[J]. IEEE/ASME Transactions on Mechatronics, 2010, 15(4): 603-614.
[21] Shen Q, Wang T, Liang J, et al. Hydrodynamic Performance of a Biomimetic Robotic Swimmer Actuated by Ionic Polymer-metal Composite[J]. Smart Materials & Structures, 2013, 22(7): 075035.
[22] Guo S, Fukuda T, Asaka K. A New Type of Fish-like Underwater Microrobot[J]. IEEE/ASME Transactions on Mechatronics, 2003, 8(1): 136-141.
[23] 苏玉东, 叶秀芬, 郭书祥. 基于IPMC驱动的自主微型机器鱼[J]. 机器人, 2010, 32(2): 262-270.
Su Yu-dong, Ye Xiu-fen, Guo Shu-xiang. Autonomous Micro-robot Fish Based on IPMC Drive[J]. Robot, 2010, 32(2): 262-270.
[24] Hubbard J J, Fleming M, Palmre V, et al. Monolithic IPMC Fins for Propulsion and Maneuvering in Bioinspired Underwater Robotics[J]. IEEE Journal of Oceanic Engineering, 2014, 39(3): 540-551.
[25] Chen Z, Um T I, Bart-Smith H. A Novel Fabrication of Ionic Polymer–metal Composite Membrane Actuator Capable of 3-dimensional Kinematic Motions[J]. Sensors & Actuators A Physical, 2011, 168(1): 131-139.
[26] Takagi K, Yamamura M, Luo Z W, et al. Development of a Rajiform Swimming Robot using Ionic Polymer Artificial Muscles[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing, China: IEEE, 2006: 1861-1866.
[27] Yeom S W, Oh I K. A Biomimetic Jellyfish Robot Based on Ionic Polymer Metal Composite Actuators[J]. Smart Material Structures, 2009, 18(8): 085002.
[28] Najem J, Sarles S A, Akle B, et al. Biomimetic jellyfish-inspired Underwater Vehicle Actuated by Ionic Polymer Metal Composite Actuators[J]. Smart Material Structures, 2012, 21(9): 299-312.
[29] Kamamichi N, Yamakita M, Asaka K, et al. A Snake-like Swimming Robot Using IPMC Actuator/sensor[C]//IEEE International Conference on Robotics and Automation. Orlando, FL, USA: IEEE, 2006: 1812-1817.
[30] Guo S, Fukuda T, Kato N, et al. Development of Underwater Microrobot Using ICPF Actuator[C]//Proceedings. 1998 IEEE International Conference on Robotics and Automation. Leuven, Belgium: IEEE, 1998: 1829-1834.
[31] Tan X, Drew K, Nathan U, et al. An Autonomous Robotic Fish for Mobile Sensing[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing, China: IEEE, 2006: 5424-5429.
[32] Shen Q, Wang T, Wen L, et al. Modelling and Fuzzy Control of an Efficient Swimming Ionic Polymer-metal Composite Actuated Robot[J]. International Journal of Advanced Robotic Systems, 2013, 10(4): 1.
[33] Rosly M A, Yussof H, Shaari M F, et al. Speed Control Mechanism for IPMC Based Biomimetic Flapping Thruster[C]//IEEE International Symposium on Robotics and Intelligent Sensors. Ottawa: IEEE, 2017: 218-223.
[34] Webb B P W, Weihs D. Fish Biomechanics[M]. NewYork, America: Praeger Publishers, 1983: 312-338.
Speed Control System of Soft Robotic Fish Actuated by IPMC
CHANG Long-fei1, 2, 3, LI Chao-qun1, NIU Qing-zheng1, YANG Qian1, HU Xiao-pin1, HE Qing-song2, WU Yu-cheng1, 3, 4
(1. Institute of Industry and Equipment Technology, Hefei University of Technology, Hefei 230009, China; 2. Key Laboratory of Bionic Functional Materials in Jiangsu Province, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China; 3. School of Materials Science and Engineering, Hefei University of Technology, Hefei 230009, China; 4. Key Laboratory of Advanced Functional Materials and Devices of Anhui Province, Hefei University of Technology, Hefei 230009, China)
soft robotic fish; ionic polymer-metal composite(IPMC); closed-loop control; feedback of speed
TP242; TB381
A
2096-3920(2019)02-0157-09
10.11993/j.issn.2096-3920.2019.02.006
常龙飞, 李超群, 牛清正, 等. IPMC驱动柔性机器鱼速度控制系统[J]. 水下无人系统学报, 2019, 27(2): 157-165.
2016-11-19;
2016-12-18.
国家自然科学基金(51605131); 安徽省自然科学基金青年项目(1608085QE100).
常龙飞(1988-), 女, 博士, 讲师, 主要研究方向为智能材料与结构.
(责任编辑: 许 妍)
猜你喜欢
科技创新与品牌(2022年7期)2022-11-15
导航定位学报(2022年4期)2022-08-15
上海交通大学学报(2021年10期)2021-11-05
北京航空航天大学学报(2021年9期)2021-11-02
北华大学学报(自然科学版)(2021年3期)2021-07-13
电脑爱好者(2020年6期)2020-05-26
小学科学(2020年11期)2020-03-04
红蜻蜓(2017年11期)2018-03-09
电子设计应用(2004年6期)2004-07-27
