
水下无人集群仿生人工侧线探测技术研究进展
2019-05-17 07:35赵振轶朱子才
水下无人系统学报 2019年2期
胡 桥, 刘 钰, 赵振轶, 朱子才,2
水下无人集群仿生人工侧线探测技术研究进展
胡 桥1,2,3, 刘 钰1, 赵振轶1, 朱子才1,2
(1. 西安交通大学 机械工程学院, 陕西 西安, 710049;2. 西安交通大学 机械制造系统工程国家重点实验室, 陕西 西安, 710049;3. 西安交通大学 陕西省智能机器人重点实验室, 陕西 西安, 710049)
水下探测是实施海洋任务的先决条件和技术保障, 也是近年来水下无人集群研究方向的技术难点和科研热点。然而, 现有的声学和光学探测系统由于易受水下环境干扰因素影响, 使其难以为水下无人集群提供精确的近场感知信息, 也成为制约水下无人集群发展的技术瓶颈, 因此探索水下新型探测技术十分必要。文中阐述了水下无人集群探测的特点与难点, 从仿生人工侧线(ALL)阵列和信号处理两方面, 综述和分析了水下无人集群仿生人工侧线探测技术的国内外研究进展, 指出当前研究中存在的关键问题, 包括人工侧线的感知原理、布局、微工艺, 以及人工智能算法的应用, 讨论了解决这些关键问题的途径。
水下无人集群; 仿生探测; 人工侧线; 信号处理
0 引言
由于国际战略形势和周边安全环境显著变化,近几年乃至未来很长一段时间内, 对海洋的开发和海洋权益的保护都将会是各国最为重要的战略目标之一。要建设海洋强国, 就需要增强海洋装备和相关技术的国际竞争力。未来水下作战将改变传统的潜艇作战方式, 使水下作战向密切监视、快速反应、精确打击和网络化方式转变, 通过天基平台、分布式水下传感器等预警侦查手段, 获得更加清晰的战场态势图和精确的目标位置, 利用性价比高、隐蔽性好的无人水下航行器(unmanned undersea vehicle, UUV)搭载武器进行水下攻击。新一代水下集群作战系统是指由鱼雷、UUV、仿生机器鱼等大量的多平台装备集群组成, 以单平台作战能力为基础, 以各平台间的协同交互能力为支撑, 构建而成的一种具有抗毁性、低成本、功能分布式和群体智能特征的新型水下攻防作战体系。目前, 研究水下集群作战装备正在受到世界各军事大国的广泛关注[1], 这其中, 水下探测技术是水下无人集群研究的先决条件和技术保障, 也是技术难点和科研热点。
鱼雷、UUV等装备通常应用声学和光学系统作为信息交互的窗口, 进行水下信息感知。对于光学感知, 在图像处理之前, 需要对已获得的水下图像数据进行预处理, 以减少噪声量、纠正衰减和几何失真, 并通过繁琐的观察识别技术等方法来实现水下无人集群的感知功能, 不但成像质量有限, 且受水质浑浊度影响, 这些因素限制了光学方法在浑浊黑暗的水下环境中感知信息的能力[2]。声呐系统作为信息获取的窗口, 虽然可以进行有效的水下探测, 但当水下无人集群工作环境空间结构复杂时, 声波会通过多种途径返回换能器(多途效应影响), 因此引起“重影”, 水下无人集群发射的多个主动声呐信号会对其他声呐造成影响, 使得水下无人集群探测系统无法对周围近场环境精确感知[3], 同时, 集群装备间的航行干扰及各种环境干扰噪声也会大大降低声呐感知性能。概而言之, 现有的光学和声学水下信息感知技术在部分情况下难以为水下无人集群目标探测提供高灵敏度高精度的近场感知信息, 也成为制约水下探测技术应用与发展的技术瓶颈。因此, 探索一种适用于水下无人集群的高灵敏度高精度新型探测技术十分必要。
鱼类在水中组成的群体可以实现快速高效移动, 进行躲避追捕和群体迁移等活动, 其主要依赖于侧线系统对周围水流环境变化的感知能力。借鉴鱼类的侧线感知方式, 研究者们设计了人工侧线系统, 为水下无人集群的探测方式提供了新的思路。文中通过综述和分析水下无人集群仿生侧线探测技术的国内外研究现状与进展, 从人工侧线系统的设计和相关信息处理方法方面揭示出当前研究存在的关键问题, 并指出解决这些关键问题的根本途径。
1 水下无人集群探测的特点与难点
水下无人集群的核心优势在于单体成本低、群体数目大、群体智能程度高。由于利用低成本的UUV集群打击高成本的舰艇可使利益最大化, 相对单平台具有更大的探测范围和更强的生存能力等原因, 利用水下无人集群进行水下探测及作战具备较高的应用价值。UUV探测技术是集群系统最为关键的技术之一, 在“数据为王”的条件下, 空中目标探测途径多、信息获取较为稳定, 目前国内外在空中无人机集群装备研究方面起步较早且相对较为成熟。相比之下, 由于水下物理场和工作环境非常复杂, 水下无人集群方面的研究刚刚起步, 相应的水下探测问题也具有自身的特点和难点,具体如下。
1) 由于水下无人集群通信距离及编队要求, 个体之间距离较近, 属于近场探测问题。水下无人集群中多个UUV同时运动和作业导致水下探测环境异常复杂。多个UUV集群工作时, 各自产生的辐射噪声和目标强度等干扰因素都会极大影响声呐探测性能, 同时也会扰动水体和增加水的浑浊度从而影响光学探测性能, 使得处于集群工作态势下的UUV利用传统的声呐或光学探测方式无法对周围环境和目标信息进行精确获取。
2) 水下无人集群常常使用的水声探测系统易受到人为或环境干扰使得功能失效。水下无人集群探测系统容易遭受水声干扰器、气幕弹及水声诱饵等人为水声干扰设备的抑制而无法正常工作, 同时也容易受到界面反射产生的多途效应和受水文条件影响严重的声波传播特性等环境因素干扰, 从而大大增加水声目标探测的难度。
3) 水下无人集群探测中使用的水下声呐探测或光学探测系统硬件体积大、能耗高。声呐探测系统中的基阵和匹配网络, 以及光学探测系统中的激光器或成像系统等硬件系统使得探测系统小型化较为困难, 且电源能耗较高。从而使得这些水下探测方式无法在仿生机器鱼等小型化集群装备中使用。
鉴于以上水下无人集群的特点和探测中诸多难点, 现有的水下探测技术难解水下无人集群信息精确获取的燃眉之急。
2 国内外研究进展
水下无人集群的相关研究起步不久, 近年来, 麻省理工大学研究人员利用多台搭载不同类型传感器的水下机器人所构成的移动传感网络, 尝试对特定海域协作标图与海洋立体调查[4-5]; 普林斯顿大学研究小组通过对鱼类的群体行为观测和分析, 试图建立一个自主海洋采样系统, 实现对Monterey海湾生态环境的监测[6-8]; 葡萄牙波尔图大学研究者利用多水下机器人组成了模块化、技术先进但成本低廉的海洋资料数据收集系统, 用以执行海洋生态环境调查等任务[9]; 英国Nekton研究机构开发了水下多智能体平台, 用于多水下机器人分布式搜索算法、编队控制及海洋立体调查等相关问题的研究[10-11]。2018年, 美国Aquabotix公司测试了一种能够模仿种群行为的自主水下机器人SwarmDiver, 其装备有用于防御、研究和监视用途的传感器, 由螺旋桨驱动, 能够实现自主航行和集群协同探测。
相对而言, 我国的水下无人集群研究起步较晚。北京大学工学院智能控制实验室在微小型仿生机器鱼的研究基础上建立了一套基于全局视觉的多仿生机器鱼协作系统, 实现了多机器鱼协作搬运、协作爆破和群体巡游等具有代表性的协作任务, 解决了机器鱼与动态障碍物之间的避碰问题[12-13]。Zou等[14]结合神经网络和滑模控制方法, 实现了多仿生机器鱼的轨迹跟踪。Shao等[15]利用模糊强化学习方法, 实现了对抗环境下的机器鱼协作顶球任务。哈尔滨工程大学海洋工程中心针对多智能水下机器人系统在海洋探测、协调自主作业等方面, 侧重于多水下机器人系统的体系结构问题、协调与协作问题、多平台数据融合问题等进行了研究[16]。
针对人工侧线(artificial lateral line, ALL)为代表的仿生探测理论与技术, 国内外学者从仿生人工侧线阵列和信号处理2个方面开展了相关的研究工作, 并取得了一定的研究成果。
2.1 仿生ALL阵列
生物学研究发现鱼类利用大量分布在身体表面的感受器进行环境探测, 这些感受器可以帮助鱼类识别周围水流水压的变化情况, 从而帮助鱼类进行避障、捕食及追踪等[17-18]。文献[19]对鱼类侧线进行的研究表明, 侧线系统所获得的信息对鱼类群体行为起到了重要的指导作用。鱼类的感受器分为机械感受器和电感受器2类, 其中机械感受器又分为管道神经丘和表皮神经丘2种, 是鱼类进行水下活动的主要感觉器官(见图1)。侧线系统由机械感受器组成, 鱼类可以通过侧线系统感知水压、水流等信息以辅助运动感知。当鱼类和周围水流发生相互运动时, 水流的流速和水压会引起鱼类体表的感知纤毛倾斜, 从而导致纤毛下的感知神经产生神经信号, 以此来进行同类之间的交互、捕食猎物以及躲避捕食者等。表面神经丘和管道神经丘等鱼类侧线器官的这些功能使得鱼类能够在完全黑暗等极端环境中进行导航、定位和交流[20-21]。
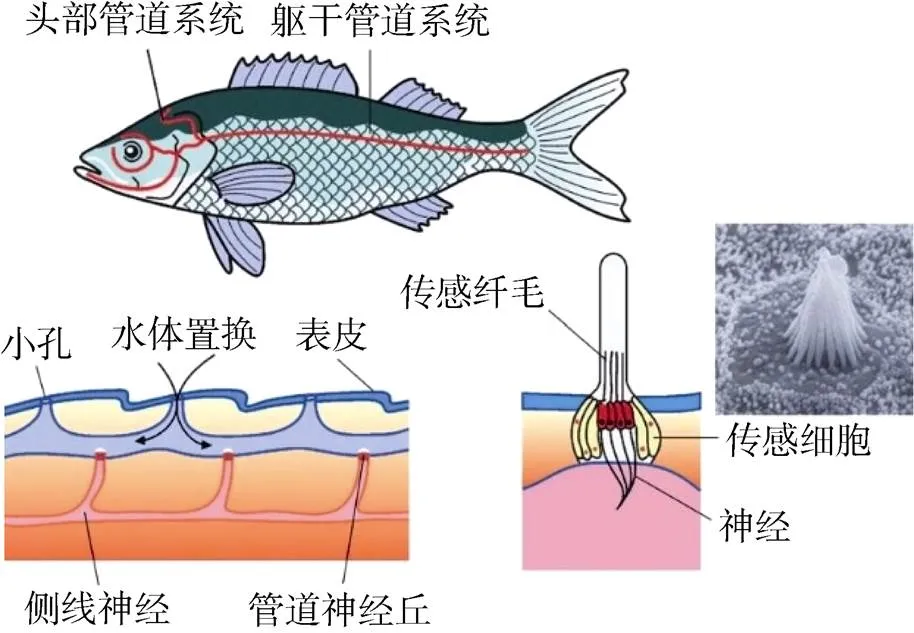
图1 鱼类侧线系统
目前, 基于仿生学理论, 学者关于ALL系统领域已经进行了诸多方面的研究。如图2所示, Nelson等[22]设计了基于压力传感器阵列的模块化ALL系统。Liu 等[23]设计了一种微压力传感器组成的ALL阵列实现湍流速度估计及障碍物躲避。在数学模型研究方面, 管道神经丘的生物力学模型由1个无摩擦的平板和1个刚性的半球组成; 表面神经丘模型则由多个连接的不同柔性的梁构成, 利用模型能够揭示这些神经丘的感知能力及其与流体相互作用的机制[24]。在实际仿生器件中, 一种技术是采用压力传感器直接搭建阵列, 另一种是基于塑性变形磁性组装技术和微机电系统(micro-electro-mechanical system, MEMS)制造技术来制作微型传感阵列(见图3)。根据传感器的感知原理, 可以分为压阻式ALL、压电式ALL、电容式ALL、光学式ALL和热线式ALL几种。

图2 模块化侧线系统

图3 微机电系统压力传感器阵列
压阻式ALL: 压阻式ALL是研究最为广泛的一类。通常, 材料在外部力学作用下产生拉伸或压缩, 自身电阻产生变化, 通过检测电阻可以测量外部的变形或者压力, 通常用于测量小的运动, 直流输出很差, 需要外加电源。根据具体的结构形式, 压阻式ALL还可以细分为2类: 一类是通过塑性变形磁组件(plastic deformation magnetic assembly, PDMA)技术和MEMS技术制造垂直结构模拟侧线的垂直毛细胞结构, 主要模拟表面神经丘感知流速。典型研究中, 大部分采用硅基体材料, 也有少量采用镍铬合金。主要有: Fan等[25]制作出首个压阻式ALL, 采用PDMA技术制作, 单元平面尺寸1100 µm ×180 µm, 对速度的灵敏度是0.1 m/s。Yang等[26]采用PDMA技术制作的压阻式ALL, 单元平面尺寸100µm × 40µm, 灵敏度可达0.1mm/s。Mcconney等[27]采用光聚合工艺制造的压阻式ALL, 平面尺寸为550 µm × 100 µm, 灵敏度可达75 µm/s。另一类是利用平面结构的传感器直接测量压力, 主要模拟管道神经丘直接感知压力。Izadi等[28]制作的压力阵列单元, 感知灵敏度为1 µV/Pa(10 V), 压力分辨率为1 Pa。Kottapalli等[29]制作的压力感知单元, 压力感知灵敏度14.3 µV/Pa, 速度感知灵敏度90.5 mV/ms–1, 对流体速度的分辨率是25 mm/s。Yaul等[30]制作的柔性感知单元, 压力分辨率是1.5 Pa。
压电式ALL: 压电式ALL利用压电材料在压力作用下能够直接产生电响应的原理来感知流场信息。主要研究有: Asadnia等[31]基于Pb(Zr0.52 Ti0.48)O3薄膜制作了压力感知阵列, 对速度的感知分辨率是3 mm/s。Asadnia等[32]基于Si60制作了纤毛式的压电式ALL, 灵敏度是22 mV/ ms–1。
电容式ALL: 电容式ALL利用外部力学作用改变电容极板的相对位置, 从而改变电容大小, 通过检测电容变化来测量力学作用, 这种测量方式具有精度高和功耗低的特点。主要研究有: Izadi等[33]基于SU-8技术开发了电容式ALL, 薄板的厚度为500~800 nm, 电容采用平行板电容结构。Krijnen等[34]利用牺牲多晶硅技术和SU-8聚合物工艺制作的电容式纤毛阵列, 纤毛长度1 mm。Stocking等[35]也开发了类似的结构, 数值仿真显示该结构速度从0~1.0 m/s开始变化时, 电容变化量为1 pF。Baar等[36]也开发了一种类似结构。
光学式ALL: 利用光学方法测量位移和力学量也是一种常见的手段, 因此也可以被用来制作ALL。文献[37]提出了2种光学式ALL, 尽管光学测量有着精度高的优点, 但是, 这种方式设计的ALL组成结构复杂, 不易于小型化和集成化, 还仅停留在设计阶段[38]。
热线式ALL: 其原理是流体流过加热的金属, 起到降温作用, 而金属电阻和温度呈线性关系。因此, 金属电阻和流速呈一定比例关系, 测量温度从而获得流速。根据这一原理开发的ALL主要有: Dagamseh等[39]开发了一种表面微结构, 其特征尺寸范围为50 µm~2 mm。Chen等[40]开发了一种类似的热线式ALL, 以模拟管道神经丘。Liu等[41]报道了一种热膜式ALL传感阵列。
从ALL传感技术研究来看, 目前的感知性能和生物侧线器官的性能相差甚远。随着材料技术的发展, 近年来人们发现了一种新型柔性力学传感材料——离子聚合物, 它既能感知弯曲和压力[42], 又能感知切向力[43], 这对发展新型的ALL系统是一个重要良机。例如, 研究发现弯曲电响应的压力差来源于弯曲变形产生的正应力梯度[42]。Tan团队[44]基于一种片状离子聚合物金属复合材料(ionic polymer-metal composites, IPMCs)开发了有源式ALL(见图4), 对目标位置的定位精度是一个体长, 初步证实了离子聚合物可应用于ALL。
实际上, 离子聚合物的电响应与皮肤的生物电形成机制十分相似, 当感受到外力作用时, 触觉感受器上的细胞膜离子通道开放, 细胞膜内外的离子重新分布, 从而产生大约90~130 mV的触觉电压[45]。显然, 这2种电响应都是基于离子的迁移重新分布。通过压力/流速传感器阵列构成的人工侧线感知器, 采集到阵列的感应信号, 通过计算处理能够直接获得水下航行器周围的流场信息, 尤其适合黑暗、复杂的海底形貌。由于敌我航行器在航行过程中激起的航迹特征存在差别, 甚至航行器特定动作可以产生特征流场[46], ALL有望通过流场感知间接地实现航行器之间的协同交流和敌我识别。
2.2 信号处理
在水下目标的智能感知及阵列信号处理方面, 早期的回波方向估计方法包括基于统计分析的最大似然谱估计方法、最大熵谱估计方法、自回归滑动平均 (autoregression moving average, ARMA) 模型谱分析方法[47]、多重信号分类(multiple signal classification, MUSIC)算法[48]以及互质阵列信号处理[49-50]等, 但是这些方法的计算复杂度普遍较高, 与实际应用中的要求并不能完全匹配。对于ALL系统, 将阵列传感信号转化成流场和目标信息, 这与声呐阵列的工作原理有一定的相似之处, 不同的是, ALL阵列感知的是力学波动信号, 声呐阵列传感信息处理技术可以应用到ALL感知信息处理, 其中应用较多的阵列波束形成算法, 对不同传感阵列具有一定通用性。密歇根州立大学的Tan教授团队[51]采用一种3层结构的神经网络和ALL进行水下振动源的定位。上海交通大学Wu等[52]利用线性判别分析(linear discriminant analysis, LDA)和支持向量机(support vector machine, SVM)结合ALL识别水流流动模式, 测试结果如表1所示。2017年, 格罗宁根大学的Boulogne等[53]采用多层感知机和ALL系统探测水下目标。
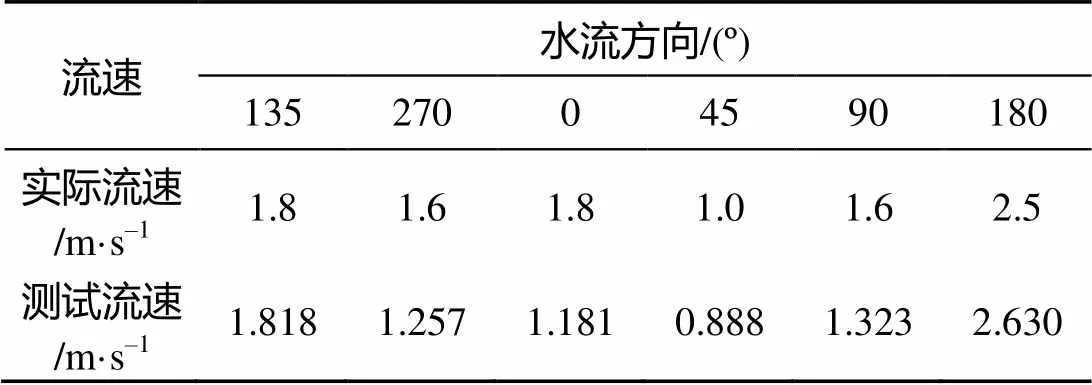
表1 ALL水流测试
在ALL阵列数据处理的研究中, 大部分学者都是对侧线阵列获取的各通道信息单独进行处理, 而没有像鱼类一样充分利用身体侧线器官获取全方位信息。近年来也有学者通过分析侧线阵列信号与流场力学模型的相关性以实现运动目标的定位和识别, 如特温特大学的Dagamseh等[54-55]利用ALL系统和波束形成技术对偶极子源的近场成像进行了探索研究, 然而这些研究也仅仅考虑了典型流体模型和直线阵列条件, 难以适用于水下多运动目标耦合等复杂强干扰工作环境和水下空间立体化仿生侧线阵列。
水下目标的识别一直以来是水下探测领域亟待攻克的难题之一。近年来鉴于深度学习在多个领域展现出前所未有的应用前景, 已有不少学者将其引入水下目标识别研究中。Kamal等[56]利用深度信念网络(deep belief network, DBN)对声呐获取的水下目标的水声数据进行识别分类, 在40类共1 000个实例的测试集上取得了90.23%的精确度, 西北工业大学Cao等[57]利用叠层稀疏自动编码器(sparse auto encoder, SAE)对白化预处理后的水下目标频谱信息进行识别分类, 并与SVM和概率神经网络(probabilistic neural network, PNN)等方法进行对比, 结果表明, 深度学习具有更高的识别分类精度。2017年, 应用声学技术国防重点实验室的Chen等[58]利用声呐获取水下目标水声信息, 用DBN和叠层去燥自动编码器(stacked denoising autoencoder, SDAE)进行识别分类, 并与传统机器学习SVM、PNN、广义回归神经网络(general regression neural network, GRNN)等方法进行对比, 结果表明, 深度学习具有更好的性能。2017年, 美国康奈尔大学Zhu等[59]利用卷积深度神经网络(convolutional neural networks, CNN)对声呐图像进行识别分类, 精度达95.88%。2018年中国海洋大学的Liu等[60]使用人工神经网络(artificial neural network, ANN)利用ALL识别水下振动源频率、振幅, 准确率达到93%。目前, 将人工智能算法结合到ALL阵列信号处理中的研究较少, 所采用的方法仅仅局限于传统的感知器和SVM等浅层结构, 而且针对水下目标识别技术大多停留在目标的发现、定位这一步, 没有对探测到的目标信息和特征进行进一步的辨识。
2.3 研究进展分析
结合以上国内外研究进展情况可以看出, 一些科研院所和高校多年来一直致力于研究ALL等新型仿生探测手段及水下目标感知方法和技术, 其中部分研究单位通过长期的研究积累和反复的实验, 在人工侧线的机理研究、制造工艺等方面取得了一定的研究成果。相对其他探测方式, ALL系统主要在近距离范围内精确探测发挥作用, 应用于水下无人集群时彼此干扰小, 更加适合水下集群的近场探测, 结合离子聚合物仿生侧线的研究能够发展出优良的ALL感知器。
近年来越来越多的研究者认识到不同于传统的水下探测方法, 人工智能方法为水下目标感知带来新的机遇与挑战, 因此, 从基础理论的研究、新方法的提出等方面打开了水下无人集群仿生探测技术研究的新局面。
尽管如此, 目前的研究仍存在着以下亟待解决的关键问题。
3 关键问题及解决途径
3.1 关键问题
综合分析现有的文献和国内外研究进展发现, 目前ALL研究的主要方向在于模拟鱼类侧线感知神经丘, 研究类似的流速、压力传感阵列和相关信号处理方法, 存在的主要问题如下。
1) ALL感知原理: 从已有传感器件的比较研究可以发现, 目前研究最为广泛的是压阻式ALL, 但是压阻式对温度很敏感, 需要非常精确的温度补偿措施。电容式虽然高精度低功耗, 但是由于与水直接接触, 水对电极之间的绝缘性能是有影响的。
2) ALL布局: 大多数现有研究的ALL单元数不超过12个, 与鱼类的侧线器官相比非常少, 难以达到鱼类的感知性能。大多数研究要么在模拟表面神经丘, 要么在模拟管道神经丘, 少有研究能够综合进行模拟, 不能完整地感知流体动力学特征。此外, 由于单元数目少, 对单元的布局方面也少有深入的研究。
3) ALL微工艺: 从压阻式ALL的研究来看, 大多采用PDMA和MEMS工艺来加工传感阵列, 这种工艺加工的传感结构对环境的适应性方面研究不够, 缺少微加工工艺与材料感知原理的综合研究。
4) 将人工智能算法结合到ALL阵列信号处理中的研究较少, 所采用的方法仅局限于传统的感知机、SVM等浅层结构, 而且针对水下目标识别技术大多停留在目标的发现、定位这一阶段, 没有对探测到的目标信息进行进一步的辨识。
3.2 解决途径
针对水下无人集群仿生探测技术的特点与难点, 以及目前研究中存在的关键问题, 作者认为应该从以下几个方面深入开展水下ALL仿生探测的研究工作, 以弥补现有理论与技术的不足, 从而为水下无人集群仿生探测提供可靠的理论依据和有效的技术手段。
1) 以离子聚合物为代表的新型智能材料具有压力和摩擦共同感知能力、与水下环境的阻抗匹配性好及其加工工艺性好的特点, 故应以模仿管道神经丘(流体压力)和表面神经丘(流体速度)为主要目标, 深入研究结构特征和尺寸效应等对传感器的感知性能影响规律, 获得高性能ALL感知单元的设计准则, 建立流体压力和流体速度与感知单元的映射关系, 同时研究感知单元对振动源的距离、频率和强度的感知特性, 建立结构单元与振动源特性的映射关系。
2) 研究应对ALL阵列进行综合模拟, 只有结合流场的速度和压力分布, 才能完整地感知流体动力学特征。在优化单一压力/流速感知单元的研究基础上, 通过微型化和阵列化模拟真实的鱼类侧线器官, 优化设计出表面阵列和管道阵列ALL的几种仿生布局, 提高感知灵敏度和分辨率, 同时研究ALL阵列布局参数对目标距离、大小和方位的感知特性, 建立ALL的水下目标感知模型。
3) 结合材料的感知原理深入进行传感结构对环境的适应性研究, 并在加工材料工艺性、具体微加工工艺等方面进行进一步改善。
4) 深入研究对探测到的目标信息进行进一步辨识的新理论新方法。模拟鱼类中枢神经系统, 在仿生侧线系统中尝试利用性能优于传统或浅层学习方法的深度学习进行水下目标感知, 对水下多运动目标的类别、速度、方位、距离和尺寸等参数进行智能辨识。
4 结束语
文中阐述水下无人集群仿生探测的特点与难点, 分析其国内外的研究进展, 并揭示了目前研究存在的关键问题。同时给出了解决问题的途径, 认为应该从ALL单元的感知规律、ALL阵列的感知特性、ALL阵列的设计及制作工艺及水下目标感知的新理论新方法等方面展开深入研究, 提出和改进现有的水下无人集群仿生探测技术。
[1] Pham L V, Dickerson B, Sanders J, et al. UAV Swarm Attack: Protection System Alternatives for Destroyers[R]//Systems Engineering Project Report, California: Naval Postgraduate School, 2012.
[2] Tyo J S. Hyperspectral Measurement of the Scattering of Polarized Light by Skin[J]. Proc Spie, 2011, 8160(22): 31.
[3] 孙荣光, 舒象兰, 曲大伟. 浅海声信道中的声纳脉冲传播多途效应[J]. 兵器装备工程学报, 2013, 34(12): 56-59.
Sun Rong-guang, Shu Xiang-lan, Qu Da-wei. Multipath Effect of Sonar Pulse Waveforms in Shallow Water[J]. Journal of Ordnance Equipment Engineering, 2013, 34(12): 56-59.
[4] Zhang Y, Streitlien K, Bellingham J G, et al. Acoustic Doppler Velocimeter Flow Measurement from an Autonomous Underwater Vehicle with Applications to Deep Ocean Convection[J]. Journal of Atmospheric & Oceanic Technology, 2000, 18(12): 2038-2051.
[5] Willcox J S, Bellingham J G, Zhang Y, et al. Performance Metrics for Oceanographic Surveys with Autonomous Underwater Vehicles[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 711-725.
[6] Liu Y, Passino K M. Stability Analysis of Swarms in a Noisy Environment[C]//42nd IEEE International Conference on Decision and Control. Maui, HI, USA: IEEE, 2003.
[7] Leonard N E, Fiorelli E. Virtual Leaders, Artificial Potentials and Coordinated Control of Groups[C]//Proceedings of the 40th IEEE Conference on Decision and Control. Orlando, USA: IEEE, 2001.
[8] Gallowaykevin C, Beckerkaitlyn P, PhillipsBrennan, et al. Soft Robotic Grippers for Biological Sampling on Deep Reefs[J]. Soft Robotics, 2016, 3(1): 23-33.
[9] Yoon S, Qiao C. Cooperative Search and Survey Using Autonomous Underwater Vehicles(AUVs)[J]. IEEE Transactions on Parallel & Distributed Systems, 2011, 22(3): 364-379.
[10] Byrne R H, Savage E L. Algorithms and Analysis for Underwater Vehicle Plume Tracing[R]. United States: Sandia National Laboratories, 2003.
[11] Schulz B, Hobson B, Kemp M, et al. Field Results of Multi-UUV Missions Using Ranger Micro-UUVs[C]// Oceans 2003. San Diego, USA: IEEE, 2003: 956-961.
[12] Chen J, Sun D, Yang J, et al. Leader-Follower Formation Control of Multiple Non-holonomic Mobile Robots Incorporating a Receding-horizon Scheme[J]. International Journal of Robotics Research, 2010, 29(6): 727-747.
[13] Zhao W, Hu Y, Wang L. Construction and Central Pattern Generator-Based Control of a Flipper-Actuated Turtle-Like Underwater Robot[J]. Advanced Robotics, 2009, 23(1-2): 19-43.
[14] Zou K, Wang C, Xie G, et al. Cooperative Control for Trajectory Tracking of Robotic Fish[C]//2009 American Control Conference. St. Louis, USA: IEEE, 2009: 5504-5509.
[15] Shao J, Yu J, Wang L. Formation Control of Multiple Biomimetic Robotic Fish[C]//2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing, China: IEEE, 2007: 2503-2508.
[16] Qiao G, Gan S, Liu S, et al. Digital Self-Interference Cancellation for Asynchronous In-Band Full-Duplex Underwater Acoustic Communication[J]. Sensors, 2018, 18(6): 1700.
[17] Voronina E P, Hughes D R. Lateral Line Scale Types and Review of Their Taxonomic Distribution[J]. Acta Zoologica, 2017, 99(1): 65-86.
[18] Bleckmann H, Zelick R. Lateral Line System of Fish[J]. Integrative Zoology, 2006, 25(1): 411-453.
[19] Mekdara P J, Schwalbe M, Coughlin L L, et al. The Effects of Lateral Line Ablation and Regeneration in Schooling Giant Danios[J]. Journal of Experimental Biology, 2018, 221(Pt 8): jeb.175166.
[20] Rizzi F, Qualtieri A, Dattoma T, et al. Biomimetics of Underwater Hair Cell Sensing[J]. Microelectronic Engineering, 2015, 132: 90-97.
[21] Liu G, Wang A, Wang X, et al. A Review of Artificial Lateral Line in Sensor Fabrication and Bionic Applications for Robot Fish[J]. Applied Bionics and Biomechanics, 2016, 2016(5): 1-15.
[22] Nelson K , Mohseni K . Design of a 3-D Printed, Modular Lateral Line Sensory System for Hydrodynamic Force Estimation[J]. Marine Technology Society Journal, 2017, 51(5): 103-115.
[23] Liu G , Wang M , Wang A , et al. Research on Flow Field Perception Based on Artificial Lateral Line Sensor System[J]. Sensors, 2018, 18(3): 838.
[24] Tan S. Underwater Artificial Lateral Line Flow Sensors[J]. Microsystem Technologies, 2014, 20(12): 2123-2136.
[25] Fan Z, Chen J, Zou J, et al. Design and Fabrication of Artificial Lateral Line Flow Sensors[J]. Journal of Micromechanics & Microengineering, 2002, 12(5): 655.
[26] Yang Y, Nguyen N, Chen N, et al. Artificial Lateral Line with Biomimetic Neuromasts to Emulate Fish Sensing[J]. Bioinspiration & Biomimetics, 2010, 5(1): 16001.
[27] Mcconney M E, Chen N, Lu D, et al. Biologically Inspired Design of Hydrogel-capped Hair Sensors for Enhanced Underwater Flow Detection[J]. Soft Matter, 2009, 5(2): 292-295.
[28] Izadi N, Krijnen G J M. Design and Fabrication Process for Artificial Lateral Line Sensors[M]//Frontiers in Sensing. Vienna: Springer, 2012: 405-421.
[29] Kottapalli A G P, Asadnia M, Miao J M, et al. A Flexible Liquid Crystal Polymer MEMS Pressure Sensor Array for Fish-like Underwater Sensing[J]. Smart Materials & Structures, 2012, 21(11): 115030.
[30] Yaul F M, Bulovic V, Lang J H. A Flexible Underwater Pressure Sensor Array Using a Conductive Elastomer Strain Gauge[J]. Journal of Microelectromechanical Systems, 2012, 21(4): 897-907.
[31] Asadnia M, Kottapalli A G P, Shen Z, et al. Flexible and Surface-Mountable Piezoelectric Sensor Arrays for Underwater Sensing in Marine Vehicles[J]. IEEE Sensors Journal, 2013, 13(10): 3918-3925.
[32] Asadnia M, Kottapalli A G, Miao J, et al. Artificial Fish Skin of Self-powered Micro-electromechanical Systems Hair Cells for Sensing Hydrodynamic Flow Phenomena[J]. Journal of the Royal Society Interface, 2015, 12(111): 20150322.
[33] Izadi N, De Boer M J, Berenschot J W, et al. Fabrication of Superficial Neuromast Inspired Capacitive Flow Sensors[J]. Journal of Micromechanics & Microengineering, 2010, 20(8): 085041.
[34] Krijnen G, Lammerink T, Wiegerink R, et al. Cricket Inspired Flow-Sensor Arrays[C]//Sensors, 2007 IEEE. Atlanta, GA, USA: IEEE, 2007: 539-546.
[35] Stocking J B, Eberhardt W C, Shakhsheer Y A, et al. A Capacitance-based Whisker-like Artificial Sensor for Fluid Motion Sensing[C]//Sensors, 2010 IEEE. Kona, HI, USA: IEEE, 2010: 2224-2229.
[36] Baar J J V, Dijkstra M, Wiegerink R J, et al. Fabrication of Arrays of Artificial Hairs for Complex Flow Pattern Recognition[C]//Sensors, 2003 IEEE. Toronto, Canada: IEEE, 2004: 332-336.
[37] Klein A, Bleckmann H. Determination of Object Position, Vortex Shedding Frequency and Flow Velocity Using Artificial Lateral Line Canals[J]. Beilstein Journal of Nanotechnology, 2011, 2(1): 276-283.
[38] Herzog H, Steltenkamp S, Klein A, et al. Micro-Machined Flow Sensors Mimicking Lateral Line Canal Neuromasts[J]. Micromachines, 2015, 6: 1189-1212.
[39] Dagamseh A M K, Lammerink T S J, Kolster M L, et al. Dipole-source Localization Using Biomimetic Flow-sensor Arrays Positioned as Lateral-line System[J]. Sensors & Actuators A: Physical, 2010, 162(2): 355-360.
[40] Chen J, Engel J, Chen N, et al. Artificial Lateral Line and Hydrodynamic Object Tracking[C]//IEEE International Conference on MICRO Electro Mechanical Systems, 2006. Mems 2006 Istanbul. Turkey: IEEE, 2006: 694-697.
[41] Liu P, Zhu R, Que R. A Flexible Flow Sensor System and Its Characteristics for Fluid Mechanics Measurements[J]. Sensors, 2009, 9(12): 9533-9543.
[42] Zhu Z, Horiuchi T, Kruusamäe K, et al. Influence of Ambient Humidity on the Voltage Response of Ionic Polymer-Metal Composite Sensor[J]. Journal of Physical Chemistry B, 2016, 120(12): 3215-3225.
[43] Kocer B, Zangrilli U, Akle B, et al. Experimental and Theoretical Investigation of Ionic Polymer Transducers in Shear Sensing[J]. Journal of Intelligent Material Systems and Structures, 2014, 14: 1-13.
[44] Ahrari A, Lei H, Deb K, et al. Robust Design Optimization of Artificial Lateral Line System[EB/OL]. [2018- 05-06].http://pdfs.semanticscholar.org/85ab/9776ef0d412bed74811c9c9528d771561743.pdf
[45] 仲昆. 机器鱼人工侧线系统的设计与环境感知研究[D]. 南昌: 华东交通大学, 2014.
[46] Zheng X, Wang C, Fan R, et al. Artificial Lateral Line Based Local Sensing between Two Adjacent Robotic Fish[J]. Bioinspiration & Biomimetics, 2017, 13(1): 016002.
[47] Hu B, Hua C, Chen C, et al. MUBFP: Multi-User Beamforming and Partitioning for Sum Capacity Maximization in MIMO Systems[J]. IEEE Vehicular Technology Society, 2016, 66(1): 233-245.
[48] Lin X, Tao M, Xu Y, et al. Outage Probability and Finite-SNR Diversity-Multiplexing Tradeoff for Two-Way Relay Fading Channels[J]. IEEE Transactions on Vehicular Technology, 2013, 62(7): 3123-3136.
[49] Vaidyanathan P P, Pal P. Sparse Sensing With Co-Prime Samplers and Arrays[J]. IEEE Transactions on Signal Processing, 2011, 59(2): 573-586.
[50] Vaidyanathan, P P. Theory of Sparse Coprime Sensing in Multiple Dimensions[J]. IEEE Transactions on Signal Processing, 2011, 59(8): 3592-3608.
[51] Abdulsadda A T, Tan X B. Underwater Source Localization Using an IPMC-based Artificial Lateral Line[C]// IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011: 2719-2724.
[52] Wu N L, Wu C, Tong G E, et al. Flow Recognition of Underwater Vehicle Based on the Perception Mechanism of Lateral Line[J]. Journal of Mechanical Engineering, 2016, 52(13): 54-59.
[53] Boulogne L H, Wolf B J, Wiering M A, et al. Performance of Neural Networks for Localizing Moving Objects with an Artificial Lateral Line[J]. Bioinspiration & Biomimetics, 2017, 12(5): 056009.
[54] Dagamseh A, Wiegerink R, Lammerink T, et al. Artificial Lateral-line System for Imaging Dipole Sources Using Beamforming Techniques[J]. Procedia Engineering, 2011, 25(35): 779-782.
[55] Dagamseh A, Wiegerink R, Lammerink T, et al. Imaging Dipole Flow Sources Using an Artificial Lateral-line System Made of Biomimetic Hair Flow Sensors[J]. Journal of the Royal Society Interface, 2013, 10(83): 20130162.
[56] Kamal S, Mohammed S K, Pillai P R S, et al. Deep Learning Architectures for Underwater Target Recognition[C]//2013 Ocean Electronics. Kochi, India: IEEE, 2013: 48-54.
[57] Cao X, Zhang X, Yu Y, et al. Deep Learning-based Recognition of Underwater Target[C]//2016 IEEE International Conference on Digital Signal Processing. Beijing, China: IEEE, 2016: 89-93.
[58] Chen Y, Xu X. The Research of Underwater Target Recognition Method Based on Deep Learning[C]//IEEE International Conference on Signal Processing, Communications and Computing. Xiamen, China: IEEE, 2017: 1-5.
[59] Zhu P, Isaacs J, Fu B, et al. Deep Learning Feature Extraction for Target Recognition and Classification in Underwater Sonar Images[C]//IEEE Conference on Decision and Control. Melbourne, Australia: IEEE, 2017: 2724-2731.
[60] Liu G, Gao S, Sarkodie G, et al. A Novel Biomimetic Sensor System for Vibration Source Perception of Autonomous Underwater Vehicles Based on Artificial Lateral Lines[J]. Measurement Science and Technology, 2018, 29: 125102.
Research Advances of Biomimetic Artificial Lateral Line Detection Technology for Unmanned Underwater Swarm
HU Qiao1,2,3, LIU Yu1, ZHAO Zhen-yi1, ZHU Zi-cai1,2
(1. School of Mechanical Engineering, Xi’an Jiao Tong University, Xi’an 710049, China; 2. State Key Laboratory of Manufacturing Systems Engineering, Xi’an Jiao Tong University, Xi’an 710049, China; 3. Shaanxi Key Laboratory of Intelligent Robots, Xi’an Jiao Tong University, Xi’an 710049, China)
The existing acoustic and optical detection systems are susceptible to disturbance of underwater environment, so it is difficult for them to obtain accurate near-field sensing information for unmanned underwater swarm. This paper discusses the characteristics and difficulties of the detection technology for unmanned underwater swarm, and reviews the research advances both at home and abroad with respect to the artificial lateral line(ALL) array and the signal processing. The key problems existing in the current researches are pointed out, including perception principle, layout and micro-process of ALL, and application of artificial intelligence algorithm and the approaches for solving these problems are discussed.
unmanned underwater swarm; biomimetic detection; artificial lateral line(ALL); signal processing
TJ630; U674; TB566
R
2096-3920(2019)02-0114-09
10.11993/j.issn.2096-3920.2019.02.001
胡桥, 刘钰, 赵振轶, 等. 水下无人集群仿生人工侧线探测技术研究进展[J]. 水下无人系统学报, 2019, 27(2): 114-122.
2018-10-22;
2018-12-10.
国家自然科学基金重大项目(61890961); 装备预研领域基金项目(61404160503); 中央高校基本科研业务费(国防重大项目培育xjjgf2018005); 陕西省重点研发计划重点项目资助(2018ZDXM-GY-111).
胡 桥(1977-), 男, 博士, 教授, 研究方向为水下(仿生)机器人、智能目标感知等.
(责任编辑: 许 妍)
猜你喜欢
农业工程学报(2022年11期)2022-08-22
体育科技文献通报(2022年3期)2022-05-23
北京航空航天大学学报(2021年4期)2021-11-24
辽金历史与考古(2021年0期)2021-07-29
军民两用技术与产品(2021年2期)2021-04-13
科技传播(2019年22期)2020-01-14
民用飞机设计与研究(2019年4期)2019-05-21
小哥白尼·趣味科学画报(2019年12期)2019-02-28
岷峨诗稿(2017年4期)2017-04-20
知识就是力量(2017年2期)2017-01-21
