
面向水下机器人的水下电场通信协议设计
2019-05-17 07:36谢广明
水下无人系统学报 2019年2期
张 晗, 王 伟, 谢广明
面向水下机器人的水下电场通信协议设计
张 晗1,2, 王 伟3, 谢广明1,4
(1. 北京大学工学院 湍流与复杂系统国家重点实验室, 智能仿生设计实验室, 北京, 100871; 2. 中国人民解放军 32555部队, 广东 广州, 510600; 3. 麻省理工学院 城市研究与规划学院, 美国马塞诸塞州 剑桥, 02139; 4. 北京大学 海洋研究院, 北京, 100871)
作为一种新型的水下通信方法, 电场通信具有能耗低, 不易受外界环境干扰, 实时性、全向性好等优点, 可在小型水下机器人水下通信、组网中发挥良好作用。在前期的研究中, 已将电场通信系统集成在一款仿箱鲀机器鱼上。但由于使用的是共享信道, 当多机器鱼(节点)通信时, 难免出现通信碰撞问题。文中基于无线通信网络载波侦听多路访问/冲突避免(CSMA/CA)协议提出了电场通信协议。介绍了协议的运行机制以及信道状态的检测方法。为验证设计协议的有效性, 进行了MATLAB仿真及3条机器鱼电场通信实验。结果表明, 该协议能有效减少通信碰撞的发生。
水下机器人; 仿箱鲀机器鱼; 水下通信; 电场通信; 载波侦听多路访问/冲突避免
0 引言
海洋覆盖了约71%的地球表面, 世界上有将近50%的人口生活在距海岸线100 km以内的区域。随着陆地资源被人类不断开发, 拥有丰富矿产、生物资源的海洋正成为各国展示经济和军事实力的擂台, 吸引了越来越多的关注。
然而人类对海洋的探索还远远不足, 海洋极为险恶的环境为人类的探索设置了重重阻碍。学者们普遍认为, 未来将由多个自主式水下航行器 (autonomous undersea vehicle, AUV)组成智能集群代替人类完成复杂的水下探索任务, 这也成为当前的研究热点[1]。
然而现有的水下通信和组网技术还远无法支撑水下智能无人集群的运行。在陆地通信中广泛使用的高频无线电磁波在水下将被严重衰减[2]。目前, 水下通信和网络主要基于水声通信技术[3], 但仍然面临着诸如多径效应、多普勒频移、传播时延等方面挑战, 且极易受环境噪声以及航行器运行噪声的影响[4], 难以在无人水下航行器(unmanned undersea vehicle, UUV)集群作业中发挥最大效能。就现有的研究来看, 需要一种新型的水下通信方式来支撑水下智能无人集群作业。
一些学者将目光投向了生活在水中的鱼类, 通过长期的观察, 发现了利用特殊的电器官放电(electric organ discharges, EOD)现象进行感知和信息交互的弱电鱼(weakly electric fishes)[5-6]。据此, 学者们提出一种名为水下电场通信的新型通信方法, 并通过实验验证了其可行性, 该方法具有实时性好、能耗低、体积小、及全向性好等优点[7-10]。在此基础上, 北京大学的Wang等[11]将电场通信系统集成于一款仿箱鲀机器鱼上(见图1), 实现了3~5 m的双机器鱼(节点)的水下通信。
由于电场通信使用的是共享信道, 当多条机器鱼同时通信时, 难免会出现通信碰撞问题, 影响通信性能。文中旨在基于无线通信网络载波侦听多路访问/冲突避免(carrier sense multiple access/collision avoidance, CSMA/CA)协议设计用于解决多节点电场通信碰撞问题的电场通信协议, 是对前期发表论文[12]的延伸和拓展, 对电场通信原理做了详细阐述, 并首次实现多条机器鱼的水下电场通信, 与原有机器鱼模型实验相比,机器鱼实验需要应对机器鱼可自主游动、协议与机器鱼主控制器兼容的挑战, 进而全面验证了该协议可为多机器鱼协作提供通信保障。
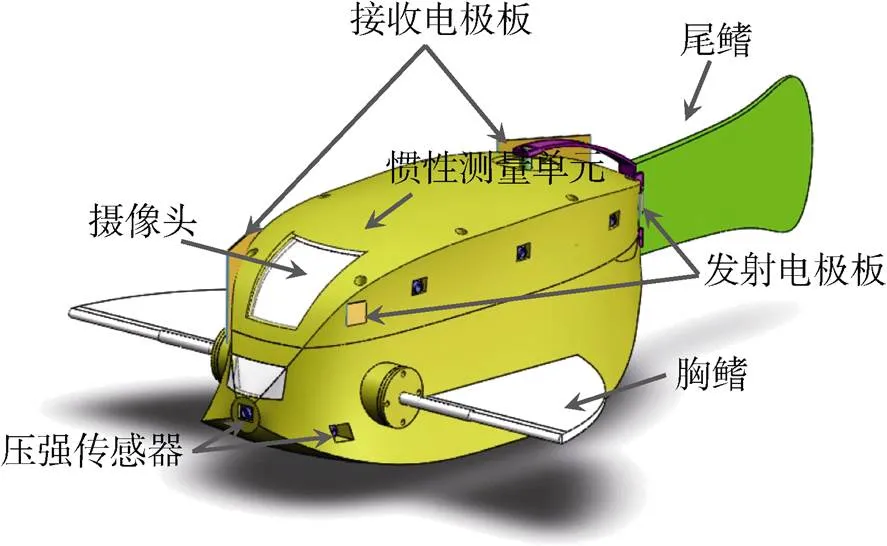
图1 集成水下电场通信系统的仿箱鲀机器鱼
1 水下电场通信
弱电鱼通过电场进行信息交互的机理非常复杂[13], 需要对其原理进行简化, 形成工程上便于实现的水下电场通信系统。考虑到计算和分析的便利, 简化为图2所示的由一对发射电极和一对接收电极组成的发射接收模型[11]。

图2 电场通信物理模型
1.1 基本原理
当变化的电流流经发射电极时, 其附近会产生交变电磁场, 而传播介质水又是良好的导体, 必须同时考虑传导电流和位移电流效应[14]。而简化的目标是通过由多个场强随时间变化的静电场序列来分析电场通信物理模型, 即交变电场满足准静态(quasi-static)场条件。
具体地, 传导电流由原子间电荷运动形成, 满足欧姆定律, 是时不变的, 表达式为
而位移电流是由原子内的束缚电荷运动引起的(通常因外部场的施加而产生), 是时变的, 其密度表达式为




接收电极1和2的电势差可通过下面的公式计算


总而言之, 当发射端电流形成的交变电磁场的变化频率满足准静态场条件时, 放置在其附近一定范围内的接收端能检测到电势差的变化, 再经滤波、放大等电路, 便能还原发射端发出的信息, 这是电场通信的基本原理。此外, 电场通信效果会因为接收端和发射端之间的相对位置以及相对角度的改变而变化。通过分析电场通信物理模型得到了电场通信的基本原理, 为电场通信系统的设计与应用提供了理论依据。
1.2 通信系统
基于电场通信原理, 简化后的电场通信系统设计方案见图3, 难点主要是发射单元和接收单元的设计。采用了数字通信和电压检测模式以及标准的串口通信协议, 可以方便地调试波特率、数据长度及控制位等通信参数。
无论是发射单元还是接收单元都采用了微控制器作为通信功能的核心处理器, 并且都有一对放置在水中的电极板与它们相连, 用于发射或接收电场通信信号。在发射单元, 信号通过微控制器的串口发出, 经幅移键控(amplitude shift keying, ASK)数字调制、放大后, 加载至发射电极板, 通过传播介质水抵达接收单元, 接收单元的电极板检测到不断变化的电势差信号, 对该信号滤波、解调, 再通过串口传至接收单元的微控制器。
2 仿箱鲀机器鱼
考虑到研究电场通信的目标是在小型水下机器人上应用, 因此在电场通信系统的设计规划阶段, 就考虑了低能耗、小型化、灵活性等特点, 并将它集成在一种名为仿箱鲀机器鱼(boxfish-like robotic fish)的水下机器人上, 如图1所示。
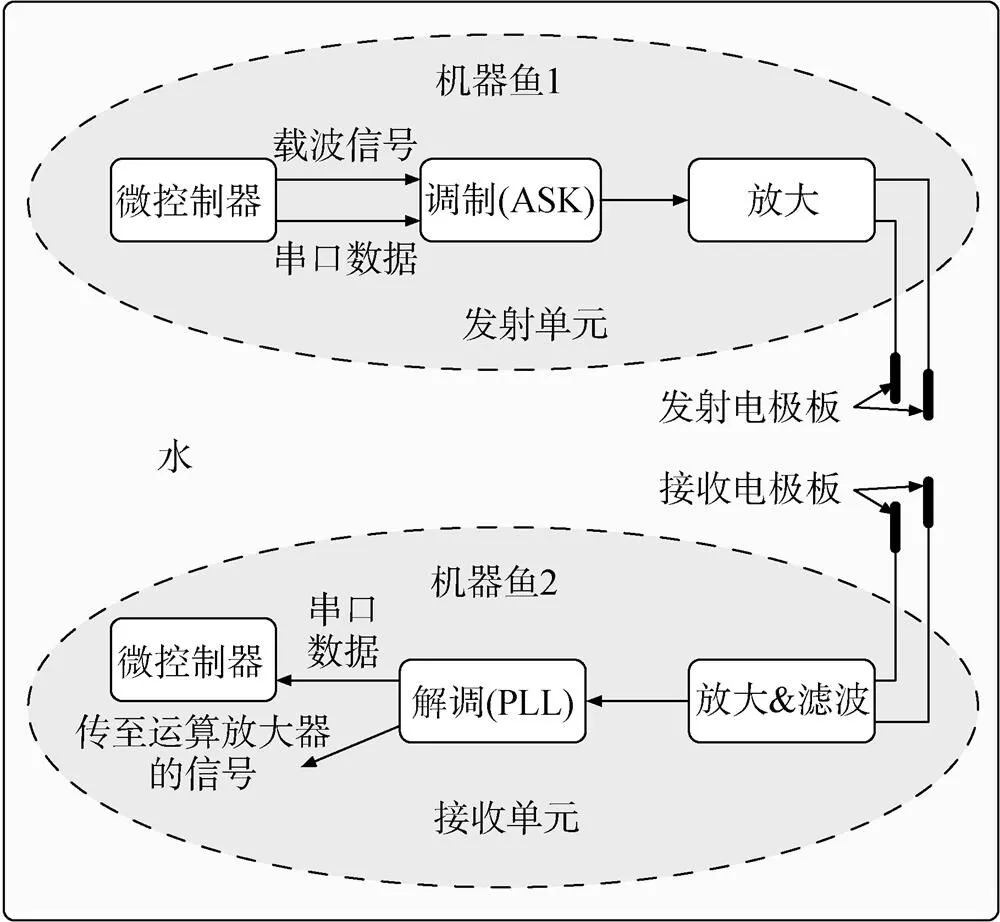
图3 电场通信系统结构图
仿箱鲀机器鱼的仿生对象是自然界真实存在的一种名为箱鲀(boxfish)的鱼类。它有1个流线型的外形, 由1对胸鳍和1个尾鳍驱动。其主控制器为树莓派(raspberry pi), 辅助控制器为3个STM32F103单片机, 用于基本的运动控制、搜集处理传感器数据和计算运动姿态。它身上还分布着多个传感器: 1个摄像头, 1个惯性测量单元: (inertial measuring unit, IMU), 1对发射电极板, 1对接收电极板和9个压强传感器[18]。通过精心设计的仿生中央模式发生器(central pattern generator, CPG), 机器鱼可实现向前直游、向后倒游, 上升、下潜, 转弯甚至翻滚等基本的游动模态[19]。
由于集成了电场通信系统(其结构见图3), 可实现近距离的双机器鱼水下通信。并通过一系列实验验证了集成电场通信系统的仿箱鲀机器鱼的水下通信效果。图4展示了集成电场通信系统的仿箱鲀机器鱼在自然湖水中进行距离为3 m的水下通信实验[11]。
实验中, 左侧机器鱼发射电场通信信号, 经湖水传播, 右侧机器鱼接收该信号, 并通过右侧机器鱼的无线发射模块传输至岸上的计算机。

图4 在湖水中进行电场通信实验
由于电场通信使用的是相同的信道, 当多条机器鱼同时通信, 会发生通信碰撞, 使电场信号无法被正确接收。需要进一步设计通信协议来支持更多的机器鱼互相通信。
3 电场通信协议设计
无线通信网络领域通过介质访问控制(media access control, MAC)协议解决通信碰撞问题: 它允许网络中的节点共享相同信道, 解决数据包冲突并防止同时传输, 具有能量效率高、信道访问延迟低等优点, 也在一定程度上维持了节点竞争的公平性。若能设计用于电场通信系统的MAC协议, 通信碰撞问题即可迎刃而解。
由于机器鱼体积小, 使用电池供电, 可携带的能量少, 水下环境复杂, 使得其稳定性远远不如陆地机器人, 电场通信系统的MAC协议不能过于复杂。此外, 机器鱼可自主游动, 对协议的鲁棒性及可靠性等都提出了更高的要求, 需要精心设计, 才能在物理信道上实现可靠的数据传输[20]。
3.1 协议选择
在错综复杂的水下环境中, 信道资源非常宝贵, MAC 协议对电场通信信道的利用有重要意义, 选择合适的MAC 协议对通信性能有很大影响, 对电场通信尤其重要[21]。
无线通信网络领域对MAC协议的研究已经开展了数十年[22], 但在水下电场通信系统中, 它仍是一个全新的内容。主要有以下2种信道分配技术: 静态划分信道和动态媒体接入控制。
对电场通信来说, 各机器鱼共享通信信道, 每个节点(机器鱼)都可自由移动, 各节点的功能相近, 地位相当, 没有中心节点来分配信道, 因此采用静态信道分配技术的MAC协议难以在电场通信中应用[12, 23]。
动态媒体接入控制技术是竞争型的MAC协议, 无需专门的中心节点为其他节点分配信道资源, 节点通过竞争动态共享同一信道, 能充分利用有限的信道资源, 较好适应机器鱼可自主移动的特点[24]。在对水下网络动态媒体接入控制技术的研究中, 一种名为CSMA/CA的协议受到了学者们的关注, 它采用载波监听(listen before talk, LBT) 机制将信道随机地分配给网络中的节点而不是指定给某一节点, 有利于信道资源的充分利用, 有效地避免了通信碰撞, 可实现多节点的接入。1997 年美国佛罗里达大西洋大学的Smith 等[25]已将CSMA/CA 协议应用于水声通信网络并证明了它能有效工作, 因此尝试将该协议与电场通信结合, 设计MAC协议。
3.2 基于CSMA/CA的电场通信协议
电场通信MAC协议需确保多个节点能有效接入信道, 且通信过程不被打断。CSMA/CA协议通过LBT机制和随机退避过程实现协议运行, 应用于电场通信的详细过程为: 当节点(机器鱼)产生发送消息的需求时, 至少要对信道的状态进行二次检测。当节点第1次检测到信道空闲时, 进入一段称为分布式帧间间隙(distributed inter- frame spacing, DIFS)的较短的等候时间, 以进入下一次检测; 否则, 该传输将被推延直到信道处于空闲状态。当节点第2次检测到空闲的信道时, 立即发送消息; 否则进入随机退避过程, 以接入信道。
结合电场通信系统的实际情况, 将协议的DIFS设定为200 ms, 时隙设定为100 ms。因此, 进入随机退避过程的节点至少需要推迟了倍的才能发送消息。协议的运行流程见图5。

图5 基于CSMA/CA的电场通信协议流程
3.3 信道状态检测
在应用电场通信MAC协议之前, 有一个核心问题需要解决——信道状态检测。只有准确获取信道状态后, 才能保证协议的运行。
信道状态检测是通过通信系统中的运算放大电路实现的, 见图6。当水中有电场通信信号时, 该信号经锁相环检测为电场通信信号后输出。由于电场通信信号为矩形信号, 经过由电容和电阻组成的电阻-电容(resistor-capacitance, RC)充放电电路后成为高电平信号, 而后被传递至运算放大器的反相输入端。蓄电池的正极分为两路, 一路经滑动变阻器与运算放大器的同相输入端相连, 另一路与运算放大器的正极相连。运算放大器将同相输入端与反相输入端的电平信号相比较, 将结果由输出端经标准串行通信协议接口输出至机器鱼的微控制器, 使微控制器得到信道空闲或繁忙状态的标志, 判断信道状态, 满足了协议对信道的“监听”需求。
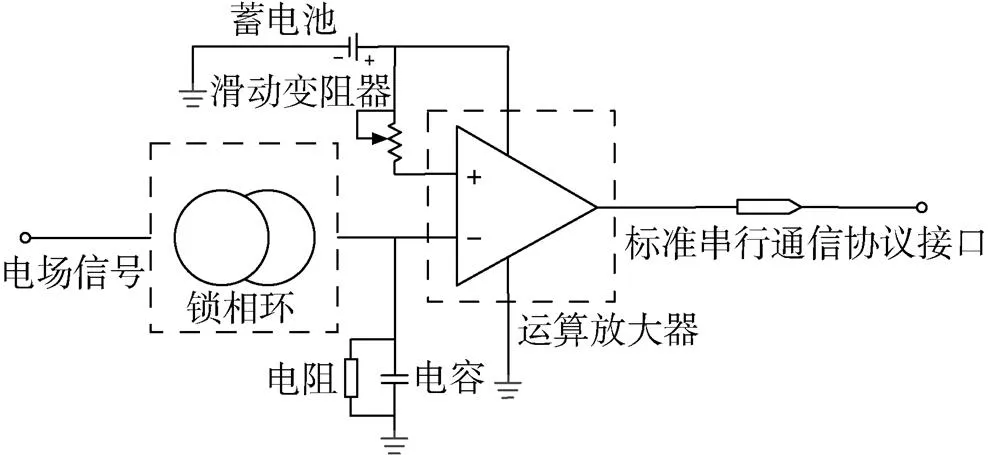
图6 信道状态检测电路
具体地, 通信信道的状态可由锁相环是否将电场通信的脉冲信号传递至运算放大器的反相输入端进行判断: 当锁相环输出脉冲信号时, 运算放大器的同相输入端电平信号的电压小于反相输入端的电压, 说明信道繁忙; 反之, 当锁相环没有输出脉冲信号, 运算放大器的同相输入端电平信号的电压大于反相输入端电压, 说明信道空闲。
4 仿真和实验
前文介绍的基于CSMA/CA的电场通信协议可通过编程在机器鱼微控制器中运行, 但是该协议能否在实际的电场通信网络中发挥作用需要通过仿真和实验来验证。
4.1 MATLAB仿真
使用MATLAB 仿真了该协议的运行, 图7展示了3个节点依次对通信信道进行竞争, 随机退避的过程, 包括从CW中选择退避数、等待和发送。图中, 三角形代表发送过程, 矩形代表退避等待过程, 矩形的高度代表退避数值。具体过程如下。
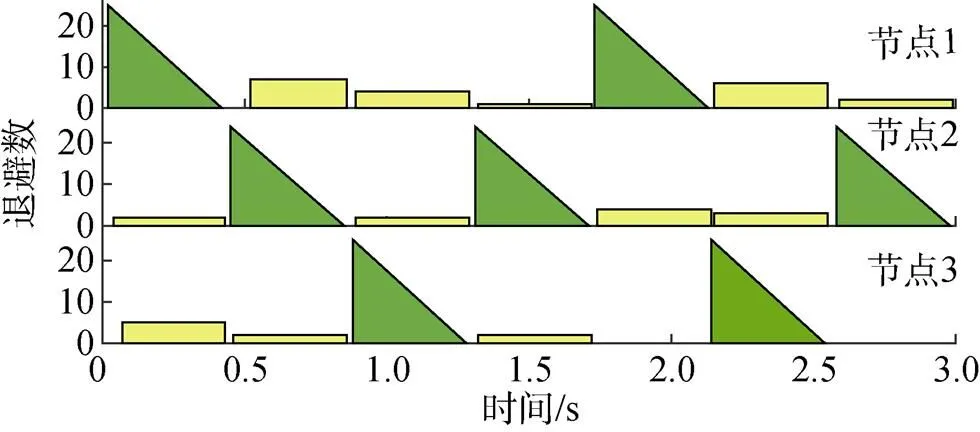
图7 三节点运行协议仿真结果
2) 节点2、3分别在=0.15 s和=0.2 s产生发送消息的需求, 但检测发现信道处于繁忙状态, 因此从CW中分别选取退避数3和5, 进入随机退避过程。由于节点1占用了信道, 节点2、3的退避数一直保持不变(如节点2、3子图的第1个矩形所示)。
3) 节点1在=0.4 s发送完毕, 节点2、3检测到空闲状态的信道, 退避数开始减少。
4) 节点2的退避数在=0.42 s减至0, 进行发送(如节点2子图的第1个三角形所示), 节点3继续等待。
5) 节点1在=0.51 s产生新的发送需求, 它需要从CW中选取新的退避数并进行等待, 这一退避数大于节点3的退避数(如节点1子图的第1个矩形所示)。
6) 节点2在=0.82 s发送完毕, 节点1、3检测到处于空闲状态的信道, 退避数开始减少。随后, 节点3的退避数减至0, 进行发送(如节点3子图的第1个三角所示)。
之后的过程以此类推。需要说明的是, 由于节点选取退避数后未进行发送前, 每个时隙检测信道状态, 只要检测到信道空闲则将退避数减1, 而刚完成消息发送又产生发送需求的节点需要重新选取退避数, 这一退避数通常大于未发送消息节点的退避数, 从而使未发送消息的节点有更大的可能先发送, 这有助于平衡各节点使用信道的机会。
4.2 多机器鱼通信实验
采用多机器鱼电场通信实验的方法进一步验证协议的有效性。与文献[12]中仅采用电场通信模板进行实验相比, 需要兼顾机器鱼可自主游动以及协议数据包与机器鱼主控制器兼容的问题。
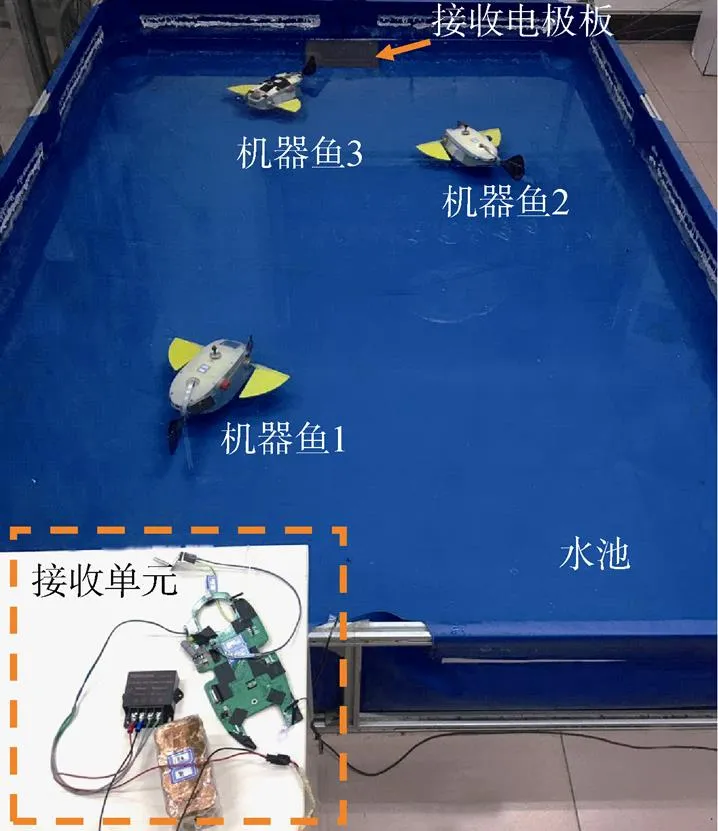
图8 3条机器鱼电场通信实验
实验结果见图9, 图中横坐标值代表信道中的一次发送, 由于每次发送之间的时间间隔并不相同, 用时刻来表示; 纵坐标分别表示3条机器鱼。从实验结果不难看出, 运行了基于CSMA/CA的电场通信协议的机器鱼能良好的通信, 没有发生通信碰撞或冲突, 从而证明了协议的有效性。
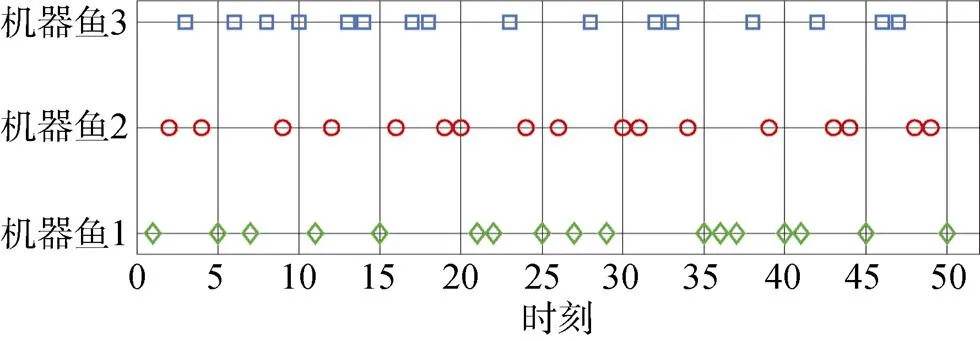
图9 3条机器鱼电场通信实验结果
5 结束语
文中围绕解决多个仿箱鲀机器鱼水下电场通信时碰撞和冲突问题, 设计了基于CSMA/CA的电场通信协议。介绍了协议的选择、基于CSMA/ CA的电场通信协议运行机制、随机退避过程和信道监听电路。为验证设计协议的有效性, 将其算法写入MATLAB, 通过仿真观察了协议的运行, 而后通过3条机器鱼电场通信实验, 证明了基于CSMA/CA的电场通信协议能有效减少通信碰撞, 保证多节点通信的正常进行。
基于CSMA/CA的电场通信协议为未来多UUV的组网和协作打下了基础, 使它们得以组成水下智能无人集群, 完成复杂的水下作业。此外, 该协议在由多个节点组成的水下无线传感器网络中也能发挥良好的作用, 可以方便、快速地采集水文信息。但是现有的电场通信系统仍存在通信距离近, 传输速率低等问题, 已完成的实验大多是验证性的, 距离实际应用还有不少工作要做。在今后的研究中, 将通过软硬件升级, 不断提升系统的通信性能, 以实现水下组网及实际应用的目标。
[1] Vasilescu I, Kotay K, Rus D, et al. Data Collection, Storage, and Retrieval with an Underwater Sensor Network [C]//Proceedings of the Third International Conference on Embedded Networked Sensor Systems. San Diego, USA: ACM, 2005: 154-165.
[2] Zhang B, Sukhatme G S, Requicha A A. Adaptive Sampling for Marine Microorganism Monitoring[C]//Proceedings of 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems. Sendai, Japan: IEEE, 2004: 1115-1122.
[3] Catipovic J A. Performance Limitations in Underwater Acoustic Telemetry[J]. IEEE Journal of Oceanic Engineering, 1990, 15(3): 205-216.
[4] Kilfoyle D B, Baggeroer A B. The State of the Art in Underwater Acoustic Telemetry[J]. IEEE Journal of Oceanic Engineering, 2000, 25(1): 4-27.
[5] Stoddard P K. Electric Signals & Electric Fish[R]. Florida: Florida International University, 2009.
[6] Worm M, Kirschbaum F, Emde G. Social Interactions between Live and Artificial Weakly Electric Fish: Electrocommunication and Locomotor Behavior of Mormyrus Rume Proboscirostris Towards a Mobile Dummy Fish[J]. PloS One, 2017, 12(9): e0184622.
[7] Schultz C W. Underwater Communication Using Return Current Density[J]. Proceedings of the IEEE, 1971, 59(6): 1025-1026.
[8] Momma H, Tsuchiya T. Underwater Communication by Electric Current[C]//Oceans’76. Washington, DC, USA: IEEE, 1976: 631-636.
[9] Joe J, Toh S H. Digital Underwater Communication Using Electric Current Method[C]//Oceans 2007-Europe. Aberdeen, UK: IEEE, 2007: 1-4.
[10] Kim C W, Lee E, Syed N A A. Channel Characterization for Underwater Electric Conduction Communications Systems[C]//Oceans 2010 MTS/IEEE Seattle. Seattle, USA: IEEE, 2010: 1-6.
[11] Wang W, Liu J, Xie G, et al. A Bioinspired Electro-communication System for Small Underwater Robots [J]. Bioinspiration & Biomimetics, 2017, 12(3): 036002.
[12] Zhang H, Wang W, Zhou Y, et al. CSMA/CA-based Electrocommunication System Design for Underwater Robot Groups[C]//Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver, BC, Canada: IEEE, 2017: 2415-2420.
[13] Kramer B. Electroreception and Communication in Fishes [M]. Stuttgart: Gustav Fischer, 1996.
[14] Maxwell J C. A Dynamical Theory of the Electromagnetic Field[M]. London: Philosophical Transactions of the Royal Society of London, 1865, 155: 459-512.
[15] Friedman J, Torres D, Schmid T, et al. A Biomimetic Quasi-static Electric Field Physical Channel for Underwater Ocean Networks[C]//Proceedings of the Fifth ACM International Workshop on Underwater Networks. Massachusetts: ACM, 2010: 7.
[16] Bullock T H, Hopkins C D, Fay R R. Electroreception, Volume 21[M]. Aurora: Springer Science & Business Media, 2006.
[17] Wang W, Zhao J, Xiong W, et al. Underwater Electric Current Communication of Robotic Fish: Design and Experimental Results[C]//Proceedings of the 2015 IEEE International Conference on Robotics and Automation. Seattle, WA, USA: IEEE, 2015: 1166-1171.
[18] Wang W, Gu D, Xie G. Autonomous Optimization of Swimming Gait in a Fish Robot with Multiple Onboard Sensors[J/OL]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017: 1-13(2017-04-05) [2018-10- 30]. http://repository.essex.ac.uk/21593/1/07892952.pdf.
[19] Zhang H, Wang W, Qu Y, et al. Model Identification for the Yaw Motion of a Tail-actuated Robotic Fish [C]//Proceedings of the 2016 International Conference on Robotics and Biomimetics. Qingdao, China: IEEE, 2016. 313-318.
[20] 魏昕, 赵力, 李霞, 等. 水声通信网综述[J]. 电路与系统学报, 2009, 14(6): 96-104.
Wei Xin, Zhao Li, Li Xia, et al. Underwater Acoustic Communication Networks: a Survey[J]. Journal of Circuits and Systems, 2009, 14(6): 96-104.
[21] Shah G A. A Survey on Medium Access Control in Underwater Acoustic Sensor Networks[C]//Proceedings of the 2009 International Conference on Advanced Information Networking and Applications Workshops. Bradford, UK: IEEE, 2009: 1178-1183.
[22] Rappaport T S. Wireless Communications: Principles and Practice, Volume 2[M]. New Jersey: Prentice Hall PTR New Jersey, 1996.
[23] 徐文, 鄢社锋, 季飞, 等. 海洋信息获取, 传输, 处理及融合前沿研究评述[J]. 中国科学: 信息科学, 2016, 46(8): 1053-1085.
Xu Wen, Yan She-feng, Ji Fei, et al. Marine Information Gathering, Transmission, Processing, and Fusion: Current Status and Future Trends[J]. Scientia Sinica Informationis, 2016, 46(8): 1053-1085.
[24] Heidemann J, Stojanovic M, Zorzi M. Underwater Sensor Networks: Applications, Advances and Challenges[J]. Philosophical Transactions, Series A, 2012, 370(1958): 158-175.
[25] Smith S M, Park J C, Neel A. A Peer-to-Peer Communcation Protocol for Underwater Acoustic Communication [C]//Proceedings of the 1997 MTS/IEEE Conference (OCEANS’97). Halifax, Canada: IEEE, 1997, 1: 268-272.
Underwater Electrocommunication Protocol Design for Underwater Robot
ZHANG Han1,2, WANG Wei3, XIE Guang-ming1,4
(1. State Key Laboratory of Turbulence and Complex Systems, Intelligent Biomimetic Design Lab, College of Engineering, Peking University, Beijing 100871, China; 2. 32555thUnit, The People’s Liberation Army of China, Guangzhou 510600, China; 3. Department of Urban Studies and Planning, Massachusetts Institute of Technology, Cambridge 02139, USA; 4. Institute of Ocean Research, Peking University, Beijing 100871, China)
As a novel underwater communication method, electrocommunication has the following advantages: lower energy consumption, less susceptible to external interference, real-time, and high omnidirectional performance. It has become a potential method for underwater communication and networking among small underwater robots. In previous research activities, the electrocommunication system has been integrated into a boxfish-like robotic fish. However, when multiple robotic fishes(nodes) communicate, collision is unavoidable because they share same electrocommunication channel. In this paper, an electrocommunication protocol based on the carrier sense multiple access/collision avoidance (CSMA/CA) protocol of wireless communication networks is proposed to solve the collision problem. The operating mechanism of the protocol and the channel state detection method are introduced. In order to validate the effectiveness of the proposed protocol, MATLAB simulations and electrocommunication experiments using three robotic fishes were conducted. The results show that this protocol can effectively reduce the occurrence of communication collisions.
underwater robot; boxfish-like robotic fish; underwater communication; electrocommunication; carrier sense multiple access/collision avoidance(CSMA/CA)
TN929.3; TP242
A
1673-1948(2019)02-0134-08
10.11993/j.issn.1673-1948.2019.02.003
张晗, 王伟, 谢广明. 面向水下机器人的水下电场通信协议设计[J]. 水下无人系统学报, 2019, 27(2): 134-141.
2018-11-30;
2018-12-18.
国家自然科学基金(91648120, 61503008, 61633002, 51575005); 中国博士后科学基金(2015M570013, 2016T90016); 国家重点研发计划(2017YFB1400800).
张 晗(1988-), 男, 硕士, 助理工程师, 主要从事仿生机器人及水下电场通信技术研究.
(责任编辑: 许 妍)
猜你喜欢
移动通信(2022年7期)2022-08-10
中学生数理化(高中版.高考理化)(2021年11期)2022-01-18
火控雷达技术(2021年2期)2021-07-21
中学生数理化(高中版.高考理化)(2021年3期)2021-05-21
开封大学学报(2021年4期)2021-04-06
软件导刊(2018年1期)2018-02-01
新高考·高一物理(2016年7期)2017-01-23
科技视界(2016年15期)2016-06-30
中学生数理化·高二版(2016年9期)2016-05-14
现代电子技术(2009年15期)2009-09-30
