
胶轮压路机施工防撞系统的分析及设计*
2019-05-09 10:08徐文毅徐静娴洪皓珏林文岩
浙江师范大学学报(自然科学版) 2019年2期
邱 欣, 徐文毅, 徐静娴, 洪皓珏, 林文岩
(1.浙江师范大学 道路与交通工程研究中心,浙江 金华 321004;2.金华市交通工程质量监督站,浙江 金华 321013)
0 引 言
胶轮压路机是沥青面层摊铺施工作业中的常用装备,存在设备质量大、行进速度快、往返操作频繁、工作噪声小、后侧面视觉盲区大、需场地施工人员配合等作业特征,时常发生与施工作业人员的刮擦与碰撞事故,带来无法挽回的经济与生命代价.如何根据胶轮压路机设备的技术特点,研发相关主动防撞系统,最大程度减小施工作业事故是道路工程界迫切关心的热点技术问题之一.
自20世纪90年代,智能交通系统(intelligent transport system,ITS)计划已在世界范围内全面启动,微波处理器及其电子元件集成水平得到了高度发展,微波雷达系统用于交通车辆的防撞预警也逐渐形成共识[1].在防撞雷达的研究热潮中,德国、日本和美国等国家相继研发出系列高性能防撞雷达产品,其中德国劳伦斯和奔驰公司联合开发的车载防撞雷达系统,可以实现目标障碍物与车辆之间距离及本车相对速度的感知;日本伊顿科技公司研制的60 GHz防撞雷达较德国在功能范围、数据精度及设备敏感度等方面有了较大突破,可有效探测速度、距离和方位角等信息,并能够进行数据反馈,实现车辆的安全制动;美国福特公司开发的防撞微波雷达系统也较为先进,并已广泛应用在无人驾驶车辆上.然而,上述防撞系统的研发成本一直居高不下,未能得到广泛的推广,目前只在极少部分的高档汽车中得到应用[2].相对而言,国内防撞雷达系统的研究与应用起步较晚,现阶段企业和科研院所主要针对防撞雷达的某一模块进行研发,产品主要集中在以超声波、激光和红外检测为控制方式的汽车防撞装置中.李湘闽等[3]以毫米波作为发射波,通过发射固定频率的周期三角波进行波谱调制分析,研发了毫米波雷达系统,可实现高精度感知与检测目标障碍物的功能.江苏赛博电子有限公司将毫米波雷达与数字信号处理器相结合,成功研制了汽车雷达防撞系统,能同时对20个探测器的信息进行处理分析,虚警率为1%,最小检测距离为1 m[4].
事实上,胶轮压路机的运行条件不同于一般路上的一般车辆,其所处的工地现场施工环境恶劣,噪声干扰大,恶劣天气带来的影响也较为明显.因此,对胶轮压路机防撞预警系统的环境适应能力、测量范围、响应时间等性能指标的要求也较高.然而,目前国内外对于压路机综合防撞系统的研究还远远不够,还未开发出较为成熟、并能普遍推广的施工机械防撞控制系统与装置.胶轮压路机防撞控制的关键在于能否实时准确地探测胶轮压路机周围的目标障碍物,能否在极短的时间内精确地测量障碍物与压路机之间的距离和相对速度,而瓶颈问题就是系统如何抑制噪声干扰,并加强回波信号,进而实施准确检测,降低虚警概率.因此,研发设计效率高、体积小、成本低的胶轮压路机综合防撞系统是解决沥青路面施工过程中高频作业事故的有效技术保障.基于此,笔者在掌握胶轮压路机施工作业特征及其工作环境的基础之上,根据已有的毫米波雷达、三维扫描激光传感器及对地雷达的工作原理,提出了适用于胶轮压路机的毫米波雷达测速系统、三维扫描激光定位系统及对地雷达测速系统,构建了集毫米波雷达、三维扫描激光传感器、对地雷达、信号处理器于一体的综合防撞控制系统,并对各模块的系统功能和工作原理进行深入分析.研究成果以期为胶轮压路机综合防撞系统平台的研发提供理论支撑,为最大程度地减少胶轮压路机施工碰撞事故提供技术保障.
1 综合防撞系统的集成设计
远距离目标探测、近距离目标识别、安全制动距离感知、声光报警与车辆制动操作等功能的实现,是有效设计胶轮压路机防撞集成系统的必要条件.最新研究成果表明,在车辆行驶过程中,中远距离的判断大多数使用毫米波雷达,车辆行进速度的测量一般采用对地雷达,而对于近距离障碍物的检测通常采用三维扫描激光传感器[5].因此,针对胶轮压路机的特殊施工条件和作业区范围,将毫米波雷达传感器、三维扫描激光传感器及对地雷达传感器进行集成,结合信号处理系统(digital signal processor,DSP)信息反馈与识别算法,设计综合防撞集成系统,实现动态预警与车辆制动,是有效帮助驾驶员最大程度保证施工安全、避免碰撞事故发生的有效方式.胶轮压路机综合防撞系统的集成构架如图1所示.胶轮压路机开始施工时,毫米波雷达、三维扫描激光传感器和对地雷达同时开始工作,毫米波雷达实时检测车辆后方障碍物的距离,三维扫描激光传感器实时监测车辆两侧是否有人员闯入,对地雷达实时计算压路机当前的行驶速度.

图1 胶轮压路机防撞系统的集成构架图
雷达传感器和激光传感器将各自计算得出的信号传入DSP系统进行处理,再将信号传入防撞预警系统,进行危险等级判断[6].当对地雷达计算出当前车辆行驶速度大于设定阈值,且毫米波雷达检测出后方障碍物与压路机之间的距离小于安全距离时,防撞预警系统就判定当前车辆处于危险状态,进行声光报警,提醒驾驶人员采取制动操作;当三维扫描激光传感器检测到压路机的侧方有人员闯入时,总控制系统强行制动车辆.胶轮压路机集成防撞系统各传感器安装示意图如图2所示.

图2 胶轮压路机防撞系统传感器安装示意图
2 毫米波雷达测距系统
2.1 测距系统的功能分析
在沥青路面摊铺施工过程中,嘈杂的施工环境或者机械故障等因素都会直接影响驾驶人员对施工危险的判断,从而导致事故的发生.综合防撞控制系统可以确保驾驶员在未及时制动的情况下,主动切断控制电路及油路,强制进行车辆制动或转向控制.其中,毫米波雷达系统实现的功能是实时发射雷达信号并计算施工车辆与障碍物之间的距离.当相对距离小于设定的阈值时立即进行制动,大于设定的阈值时,不进行制动,毫米波雷达继续计算新的距离,直到施工结束.毫米波雷达由天线前端发射信号,当信号遇到障碍物目标后被目标表面反射,目标回波由天线接收并发送到混频器.混频器将发送的信号与回波信号进行混合,并将混合信号发送回数字处理电路[7].这些混合信号经过放大、滤波和转换后,得到差分频率信号.数字处理电路通过离散傅氏变换的快速算法(fast Fourier transformation,FFT),计算车辆与目标的距离和方向,将结果送往终端.终端具有目标指示、声光告警、人机接口和车辆接口等4项功能.人机接口主要用于设定预警条件,车辆接口一方面可以得到车辆的速度信息,另一方面还可以向驾驶员提供目标信息,其工作流程图如图3所示.

图3 毫米波雷达工作流程图
2.2 测距系统的工作原理
毫米波雷达测距是利用波长介于1~10 mm、频率在30~300 GHz的电磁波,对障碍物表面进行反射来测定障碍物位置与相对速度[8].根据毫米波雷达探测系统的功能要求,要求雷达同时对障碍物目标的距离和方向进行测量,并进行坐标回传.雷达系统由天线、发射器、接收器、信号处理系统及终端等部分组成,其中接收器与发射器称为高频组件,组成结构如图4所示.
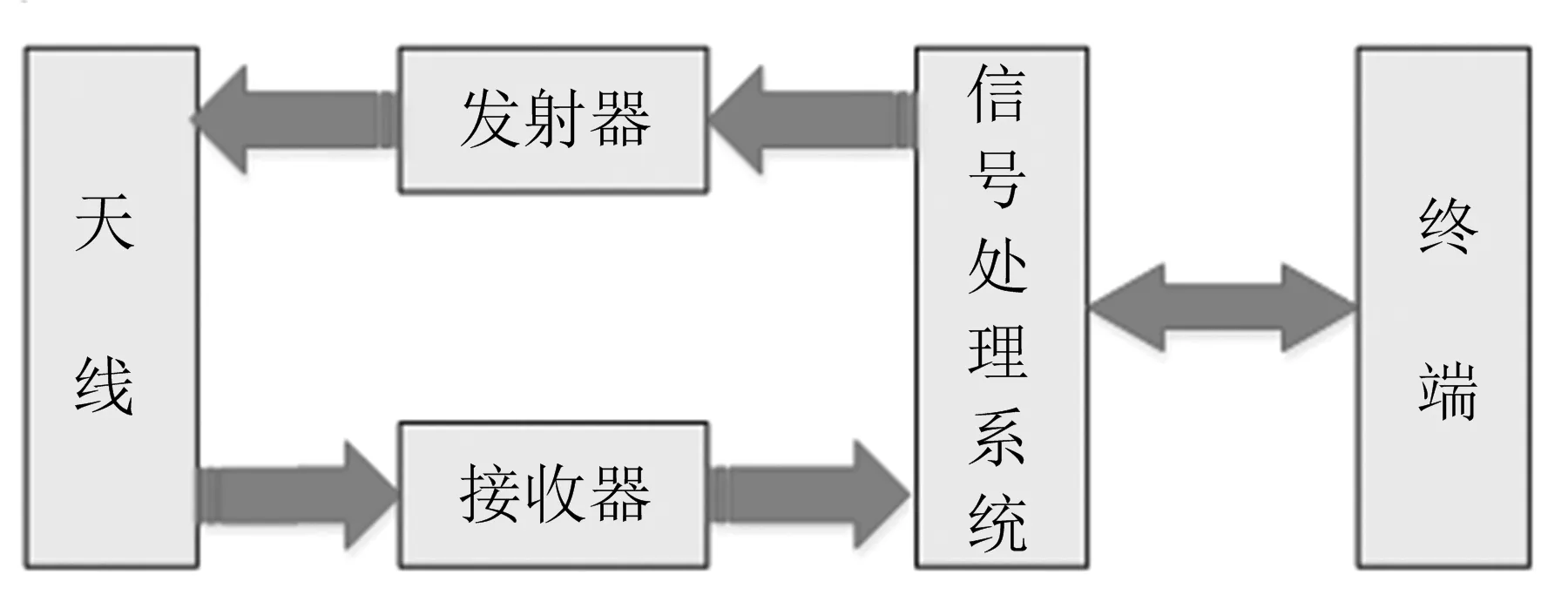
图4 毫米波雷达组成结构
雷达对目标距离和速度的测量符合多普勒效应原理,某一静止目标在某一t0时刻的瞬时反射信号如图5所示.在混频器中,混合发射信号与反射信号生成一个稳定的差频信号.此频率越高,目标的距离越远,二者的关系如式(1)所示.

图5 毫米波雷达多普勒效应原理图
(1)
式(1)中:fD为差频;R为目标的距离;T为三角波调制周期;C0为光速;Δf为信号发射器发射频率的变化范围.多普勒频率的计算公式如下:
(2)
式(2)中:f0为毫米波雷达的发射频率;C0为光速;v为车辆运动速度;α为运动的实际方向与传感器到目标连线之间夹角的角度.同时,由于存在延迟效应,将导致目标的接收信号出现时间延迟fy,计算公式如下:
(3)
延迟效应与多普勒效应的关系如下:
fD↑+fD↓=2fy.
(4)
式(4)中:fD↑为三角波上升区域与接收信号的延迟频率;fD↓为三角波下降区域与接收信号的延迟频率.由上述4个公式联立可得出距离R的计算公式,即
(5)
计算分析时,参数C0,T,Δf,f0为已知值,fD↑,fD↓可通过FFT算法获得,最终得到距离R的值.
3 三维扫描激光定位系统
3.1 定位系统的功能分析
胶轮压路机车身较高,驾驶人员在驾驶室内对侧方有无人员闯入的判断存在视觉盲区,容易造成施工事故.因此,需要在胶轮压路机侧方增设三维扫描激光传感器,以自动感应有无侧方人员的进入[9].若三维扫描激光传感器检测到有人员进入,则传感器将信号传递给总控制系统,控制系统将信号传送给报警模块,进行声光报警并切断油路,实现紧急制动,避免事故发生;若无人员进入,则不进行制动,车辆继续正常工作.
综合防撞集成系统内的三维扫描激光定位系统主要具有形状检测、图形分析、无人搬运车导航、导航实时监控、物体位置测量等功能.三维扫描激光传感器发射连续脉冲激光,通过照射高速旋转立体镜,在各个方向上形成反射脉冲激光,构成稳定的扫描区域.区域扫描主要实现以下2个功能:一是设置远近多个带状区域性保护区,当有人员进入保护区时对驾驶员进行声光报警以提醒驾驶人;二是扫描器将每个测量点的距离和高度坐标值传送到信号处理系统,实现物体轮廓呈现[10].
3.2 定位系统的工作原理
基于飞行时间法,三维扫描激光传感器进行测距分析,并获取被测点在传感器坐标系下的坐标值[11].在三维激光传感器的光学系统中有2个激光器,其发出的光能够被耦合成光束.一束光直接进入标准光纤,另一束光通过透射光学系统进入到扫描头内.扫描头设置有旋转台,可控制激光扫描头的旋转方向和幅度.测量光束经过旋转台后,照射在目标表面并同时被反射,成为回波光束.反射的回波光束再次进入接收系统,经过放大和转换处理后,被传送到电路控制系统进行信号处理[12].三维扫描激光器工作技术原理如图6所示.
4 对地雷达测速系统
4.1 测速系统的功能分析
胶轮压路机在工作过程中要保持一定的车速以避免自身的重力对沥青摊铺材料的影响,而在车速较高的情况下,若驾驶人员未能及时进行车辆制动,就会使施工事故发生的概率大幅度增加[13].因此,胶轮压路机在施工过程中需要安装对地雷达,以将对地雷达接收到的信号传送到信号处理系统,计算本车车速,并结合毫米波雷达系统和三维扫描激光定位系统,判断障碍物与本车之间是否存在危险及危险程度,进而选择相应的制动措施,从而避免碰撞事故的发生.

图6 三维激光雷达工作技术原理图
一般来讲,胶轮压路机制动全过程由驾驶员反应时间tf(tf∈[0,t1])、制动系统协调时间tx(tx∈[t1,t2])、快速制动时间tk(tk∈[t2,t3])和稳定制动时间tw(tw∈[t3,t4])等4个部分组成,其对应的运动形式包括匀速运动、急剧制动、制动恒定等3个阶段[14].制动全过程中的车速(v)和减速度(a)的变化规律如图7和图8所示.胶轮压路机制动全过程安全距离(S)同时受到v和a的影响,可分别由对应的3个阶段计算获取.

图7 制动速度和时间关系图 图8 制动减速度和时间关系图
1)匀速运动阶段.匀速运动阶段包括tf和tx时间段,此时压路机没有发生制动操作,仍以初速度v保持运动,故行驶距离S1为
S1=v(tf+tx)=vt2.
(6)
2)急剧制动阶段.在急剧制动阶段,减速度基本呈线性增长,由图8可以得出,任一时刻的减速度为
(7)
tk时间段内任一时刻的速度为
(8)
制动距离Sk为

(9)
当tk=t3时,急剧制动阶段的行驶距离S2为
(10)
3)制动恒定阶段.在制动恒定阶段,减速度为固定值,可得tw时段的初速度等于tk时段的末速度,即当tk=t3时,
(11)
稳定制动阶段tw时段的末速度v2为
(12)
由于tw时间段的末速度为零,所以
(13)
可得出制动距离S3为
(14)
由式(6)~式(14)可以得出制动距离S为
(15)
值得一提的是,速度和减速度可根据安装的对地雷达测得,各反应时间可根据制动系统及驾驶人员的特征取不同的值,由此可确定防撞系统的最小报警距离.
4.2 测速系统的工作原理
对地雷达测速过程符合多普勒效应原理,其组成主要有天线、发射机、接收机、数字信号处理系统和数据总线等,其组成框图如图9所示.在胶轮压路机行进过程中,安装在车底的对地雷达将发射电磁波,其与地面接触后,将形成具有一定振幅和频率的反射电磁波[15].多普勒雷达测速示意图如图10所示.

图9 对地雷达组成框图 图10 多普勒雷达测速示意图
多普勒频率与车速的关系如式(2)所示,据此可以推导出压路机速度的表达式为
(16)
5 信号处理系统
胶轮压路机集成防撞系统优势发挥的关键在于DSP的稳定性与精确性[16].在胶轮压路机集成防撞系统中,DSP主要处理的是各传感器接收的回波信号.然而,回波信号信息复杂,除了含有目标障碍物的反射信号外,还包括各种干扰信号[17].为了提高信号处理的精度,胶轮压路机集成防撞系统中的DSP模块首先对回波信号进行滤波处理,剔除不平稳的信号;然后对固定地物杂波、运动杂波及无规则噪声进行降噪处理.实际分析中,可分别采用固定对消法和门限法削弱施工现场的地物杂波和不规则热噪声,同时采用累加处理法提高信噪比,从而提高施工现场噪声抑制率,提高检测精度.
系统集成过程中采用的处理器为嵌入式处理器,主要由供电、信息采集、报警及制动4个模块组成.供电模块保证处理器能正常工作,信息采集模块负责将雷达系统探测的信息进行信号处理,并传输至处理器,处理器根据危险源的距离,启动报警模块或者制动模块.嵌入式处理器组成结构如图11所示.

图11 嵌入式处理器组成结构框图
6 结 论
本文从胶轮压路机实际施工环境、作业特征及事故原因等因素出发,构建集毫米波雷达、三维扫描激光传感器、对地雷达、信号处理系统于一体的综合防撞控制系统,并对各模块的系统功能和工作原理进行了系统分析,主要成果如下:
1)综合分析了胶轮压路机施工作业特点及产生碰撞事故的原因,根据胶轮压路机设备的技术特点,提出了胶轮压路机由远及近的二级防撞控制策略,阐明了毫米波雷达远距离侦测、三维扫描激光传感器近距离感知的防撞预警条件.
2)系统地分析了毫米波雷达传感器、三维扫描激光传感器、对地雷达传感器及信号处理系统的功能与工作原理,为胶轮压路机综合防撞集成系统的开发提供技术支撑.
3)提出了胶轮压路机施工过程中安全制动距离的确定方法,明确了压路机防撞雷达与激光信号处理的重点是减少干扰,准确检测回波信号;而测速和测距的关键是差频信号的计算.
猜你喜欢
机械管理开发(2022年2期)2022-05-12
机械管理开发(2022年2期)2022-05-12
动漫界·幼教365(大班)(2021年4期)2021-05-23
商品与质量(2019年12期)2019-12-19
汽车工程师(2018年1期)2018-07-13
科学与财富(2017年30期)2018-01-01
中国公路(2017年13期)2017-02-06
火控雷达技术(2016年2期)2016-02-06
民用飞机设计与研究(2015年3期)2015-12-07
筑路机械与施工机械化(2015年11期)2015-07-01
