一种低成本FMCW雷达测距系统中频电路设计*
2019-05-08 03:26:32殷树娟李翔宇
微处理机 2019年2期
王 硕,殷树娟,李翔宇
(1.北京信息科技大学理学院,北京100192;2.清华大学微电子学研究所,北京100084)
1 引言
雷达是利用电磁波探测目标的电子装备,是集中了现代电子科学技术先进成果的高科技系统。雷达发射电磁波照射目标并接收回波,由此来发现目标并测定目标的位置、运动方向和速度等特性。在雷达最初面世之时,因其成本和体积等诸多限制,几乎都是用于军事用途,例如舰载雷达、机载雷达、用于火炮锁定的相控雷达阵列等。经过长期发展,随着对雷达研究的深入和硬件水平的进步,一些低成本的小型雷达也实现了民用化。尤其是近年来随着物联网技术的发展,人们在赋予物品电子信息灵魂的同时,也更加注重智能设备给安全出行带来的提升。例如当下最热门的自动驾驶技术,作为一整套复杂的电子设备和软件相互配合的产物,其技术核心即是基于雷达防撞系统之上的。
FMCW(Frequency Modulated Continuous Wave),即调频连续波雷达,因其具有辐射功率小、测距精度高、设备简单、易于实现固态化设计等优点[1-3],无论是在军用领域还是在民用领域都有广泛的应用。故此,针对行业内的面向民用化的趋势,以汽车防撞雷达为背景,采用24GHz小型雷达模块,设计一种基于FMCW雷达的中频处理电路,并使其发挥出设计简单、易于实现、低成本、性能良好等优势。
2 原理与中频参数设计
2.1 FMCW测距原理
FMCW雷达的工作原理是用回波信号和发射信号的一部分进行相干混频,得到包含目标距离和速度信息的差频信号,然后对差频信号进行处理和检测以得到目标的速度和距离。通常情况下,FMCW的调制方式有锯齿波和三角波两种。锯齿波调制可以获得目标的距离信息,三角波调制可以获得目标的距离和速度信息,但锯齿波调制为单扫频信号,在信号产生上相对简单,在信号处理的研究和实现上也更容易,因而成本低廉,故此本设计采用锯齿波调频来实现FMCW的测距功能。锯齿波调频雷达的测距原理如图1所示。
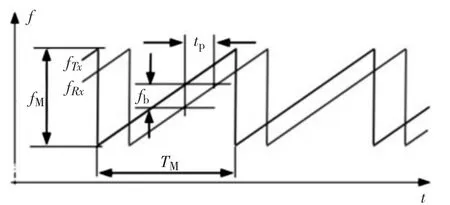
图1 锯齿波调制FMCW静止目标回波
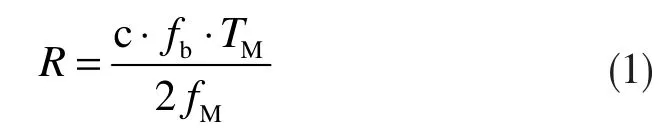
其中fM为调制信号带宽,TM为调制周期,tp为时延,fb为差频,由此可得距离运算公式:
2.2 滤波参数设计
根据锯齿波调制FMCW雷达检测静止目标的测距公式(1),可推导出中频信号的频率公式如下:
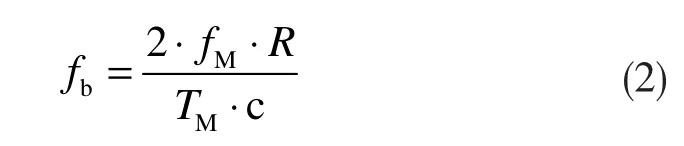
通过上述公式,可以看出中频信号的频率主要与调制信号带宽、调制周期及目标放置位置有关。雷达前端收发机采用Rfbeam公司的24GHz低成本雷达K-LC2,该模块集成了射频的收发及混频等功能,可以在锯齿波或三角波的调制方式下发射连续波。电路的基本结构如图2所示。根据该型号雷达收发机参数手册,该类型雷达收发机调制带宽为800MHz。信号的调制周期与雷达的应用距离有关,探测目标越近,则所需调制信号频率越高。在探测远距离目标(30~100m)时通常采用100~200Hz的调制频率;探测近距离目标(10~20m)时采用500~1kHz的调制频率[4-7]。
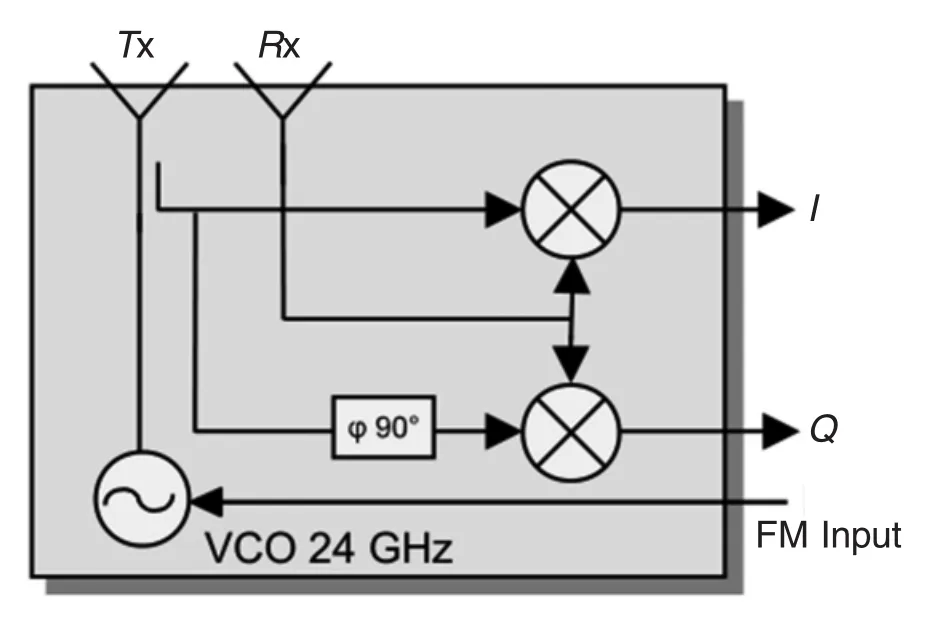
图2 雷达收发机电路结构
此类型雷达收发器的作用距离与检测目标相关,根据防撞雷达的技术需要,本设计首要检测目标为人。该类型雷达以人为检测目标时距离要求控制在10m以内。因此采用近距离探测的调制信号,以1kHz的锯齿波为调制信号,预警目标为大于等于人的物体,探测距离为0.4~10m。
由上述公式(2)可以计算得到,在该场景下的中频信号的大致范围为2~66kHz。
依据回波信号的频率范围,我们可以设计中频处理部分滤波器的主要参数。高通滤波器的主要作用是抑制锯齿波调制信号的泄露,将高通的截止设置5kHz,为调制信号频率的5倍,可以有效消除调制信号的泄露,同时衰减近距离目标回波的信号的幅度,避免溢出——近距离目标因为信号衰减少,回波能量通常较强。低通滤波器截止频率采用70kHz,略高于频率范围上限,以保证目标距离较远、信号较弱时,有用信号尽量不被衰减,同时滤除系统中混有的高频干扰。
2.3 放大参数设计
对大参数进行设计,首先需要确定回波能量的大小,然后根据回波能量大小及AD的选择确定放大倍数。雷达信号回波的能量大小可以由雷达方程中的几个关键参数来决定。雷达方程为:

上式中,Pr就是回波的功率大小,Pt是发射功率,G是天线增益,Ae为天线孔径,σ是被测目标的雷达横截面积,R是被测目标的距离。其中发射功率、天线增益、天线孔径参数都是根据雷达收发机的参数唯一确定的。据此,回波功率大小Pr只与目标的距离和雷达横截面积有关。根据这两个参数的正反比关系可以确定最大的回波功率和最小的回波功率。
在最远探测距离处,以雷达检测行人为目标的雷达横截面积为1m2,得到回波功率为:

而在最近探测的距离处,以雷达波的照射面积作为目标的横截面积,得到回波功率为:

根据此结果,可以得知如果将混频输出信号直接接入AD的输入端,由于回波能量过小很容易被杂波淹没掉,而且微弱的中频信号容易被外界干扰源及系统内部噪声所影响,因此需要对雷达输出的中频信号进行放大等预处理。在系统的测距范围内,中频信号的功率大小为-82.43dBm~-35.37dBm,差值为47dBm左右,在选择ADC时要求在动态范围内上限和下限各留有6dBm的余量,因此最小的SNDR为59dBm。AD的位数可计算为:
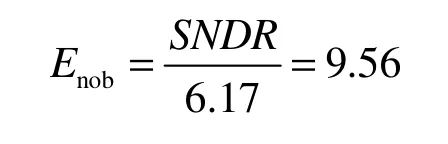
根据这一结果,采集系统的AD有效位数应当大于9.56。因此ADC选择为12位的AD9226芯片,最大采样率为65MSPS。将其按图3配置使ADC的电压输入范围为1~3V。并在输入端匹配一个信号衰减电路使ADC的输入范围拓展到0~5V。

图3 ADC配置图
由于设计应用距离范围小于10m,为降低设计成本,无需采用AGC动态增益调整设计,只需在输入电压幅值不超过5V的前提下,尽可能放大有用信号即可。经计算,当放大增益为60dB时即可满足设计要求。
3 电路设计
3.1 中频电路设计
根据前文的参数计算结果及降低成本的设计需要,中频电路采用简单的设计结构,即用一个带有60dB左右增益的高通加低通的有源滤波器,采取级联的方式组合,电路设计图如图4所示。负载阻抗为1kΩ 左右,通带为 2~70kHz。
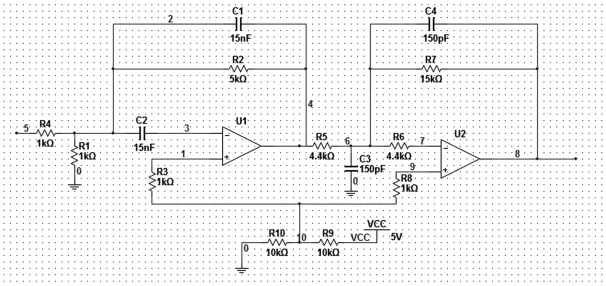
图4 中频电路设计
3.2 调制信号产生电路设计
FMCW雷达需要用调制信号来周期性地改变发射频率以达到测距的目的[8]。因此需要设计一个匹配雷达收发机的调制信号产生电路。K-LC2的VCO输入范围是-0.5~2V,而FPGA可以提供的输出电平为0~3.3V,因此设计一个信号调整电路,如图5所示。
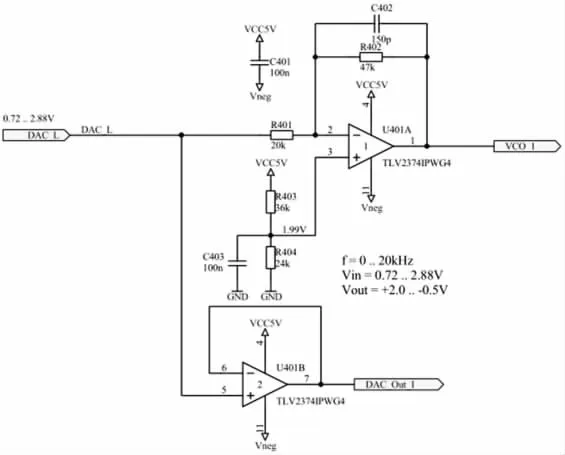
图5 信号调整电路
该电路由放大器组成,将0.72~2.88V的DAC输出对应调整为2~-0.5V的VCO输入,同时通过一个电压跟随器引出DAC输出,可以用作VCO的非线性修正。通过收发机控制部分发送锯齿波的数字化波形数据,将经过DAC转换成VCO电压即可。波形产生结果如图6所示。
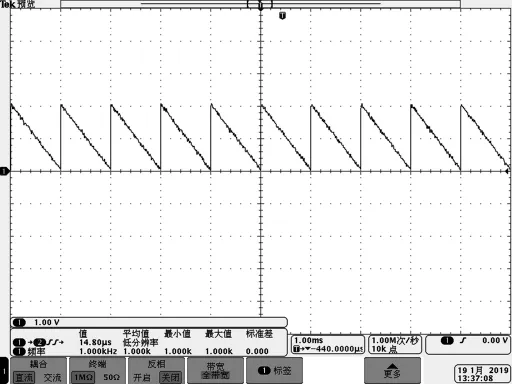
图6 调制信号波形
4 信号采集及测试
4.1 FPGA采集部分设计
为验证设计方案的性能和正确性,采用FPGA开发板来实现波形产生及信号的采集与发送部分,与前端中频电路一起组成一个完整的收发系统。其工作流程和结构如图7所示。采用ALXIN黑金开发板,是一款基于Xilinx公司Sparten-6系列的FPGA。FPGA产生DAC的输入数字序列,最终产生发射波形。回波采集部分是搭建一个数据通路,将ADC采样到的数据发送到PC。
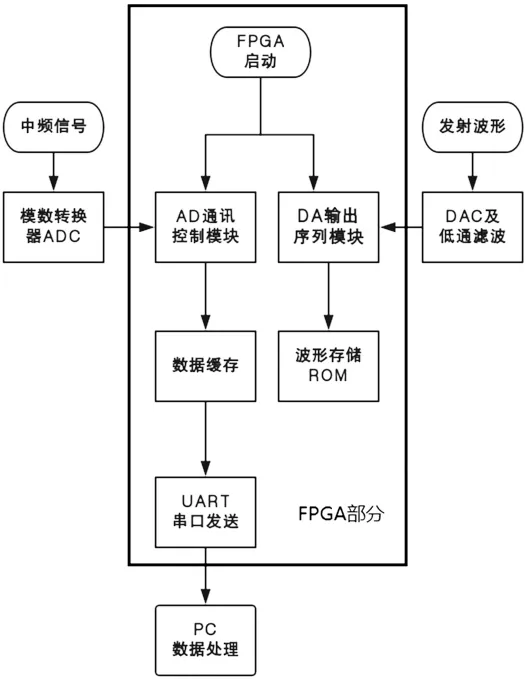
图7 FPGA部分工作流程和结构
FPGA的工作流程为:第一步,初始化各个模块;第二步,启动时钟和使能控制信号,同时启动发射和采集模块;第三步,当数据存入缓存后,使能串口发送模块,并在采样时钟上升沿到来时,每采集一个数据的同时发送模块从缓存中读出一个数据,以保证吞吐速率一致。
4.2 系统测试
将发射波形接入雷达收发机的VCO输入端,并给雷达模块供电。将雷达模块I路引脚接入中频电路板输入端,将中频电路输出接入ADC,在目标40cm处放置目标硬纸板,并启动FPGA采集回路。在PC端启动串口调试助手接收数据,如图8所示。
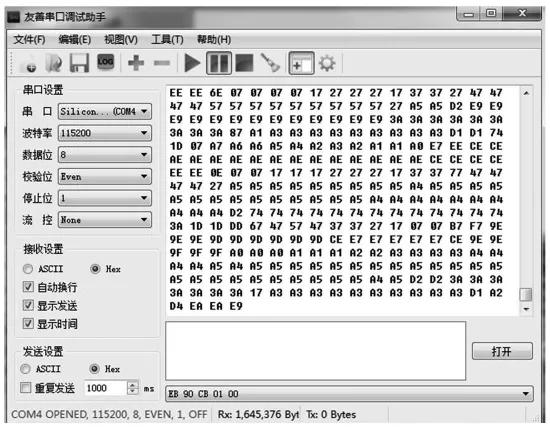
图8 PC串口接收数据
将串口接收到的数据作为原始数据送入PC中,用Origin 9软件处理后,取两个周期做快速傅里叶变换得到雷达回波的频谱图,如图9所示。可以看出能量分布最集中的频率点即是雷达的差频频率,根据差频和距离换算公式(1)即可得到目标的距离R。
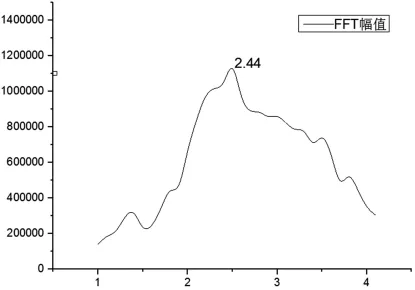
图9 PC处理后的差频频谱
另外取有效距离中其余不同距离的几个点再进行测试。最终测试结果如表1所示。
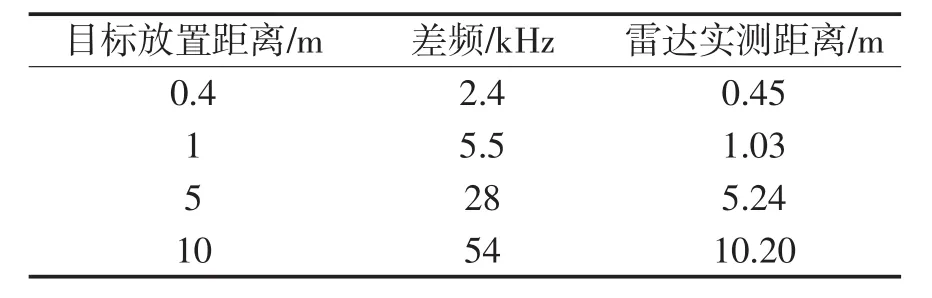
表1 测试结果
5 结束语
对FMCW雷达的测距原理进行分析,根据实际应用背景,介绍了中频电路关键参数的设计方法,实现了一种结构简单的低成本中频电路。在验证部分,使用FPGA采集信号并用PC进行信号处理,得到了目标的距离信息,结果表明此中频电路设计正确,测距精度良好,对行业相关设计有一定的参考意义。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
天天爱科学(2021年10期)2021-10-11 13:14:17
科学(2020年3期)2020-01-06 04:02:51
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
电子制作(2017年7期)2017-06-05 09:36:13
火控雷达技术(2016年3期)2016-02-06 02:30:26
精密制造与自动化(2015年4期)2015-11-27 03:37:28
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50