
新型全液压煤矿用巷道修复机研制与应用
2019-05-07 03:28:50李旭涛
煤矿安全 2019年4期
李旭涛
(中煤科工集团西安研究院有限公司,陕西 西安710077)
近年来,国外相关企业已经开展了巷道修复设备的技术研究,主要以德国哈泽玛格公司(HAZEMAG)和德国戴尔曼哈尼尔矿业系统有限公司(DH MINING SYETEMS)研制的巷道修复机或卧底机为典型代表。发达国家对于巷道修复治理设备进行了比较系统全面的研究,研制的巷道修复治理设备,在减小结构尺寸、提高生产能力的同时,使设备的功能更加完善和集成,工人劳动强度大大降低,具有良好的巷道修复效果。但是,国外煤矿埋藏深度小,地质条件简单,与我国煤矿巷道地质条件具有极大的差别,而且国外设备售价高、配件供应跟不上,导致无法大规模推广使用。针对这种情况,2013年,为适应我国煤矿巷道围岩修复治理的特殊要求,中煤科工集团西安研究院有限公司自筹资金科技创新项目“多功能煤矿巷道修复机研制”,开发出了WPZ-55/50L型煤矿用巷道修复机,主要用于煤矿井下低矮变形巷道围岩修复治理施工。
1 总体方案设计
1.1 施工方法的选择
煤矿巷道作为煤矿井下生产系统最基本单元,其安全可靠性是确保矿井正常生产的基础,但是随着我国煤炭开采强度和深度的不断增加,导致巷道应力集中出现并叠加,巷道围岩变形日益突出[1-2]。因此,可以看出,巷道修复治理施工过程中,主要涉及工作有:破碎、扒矸、运矸、装矸及锚固钻孔等,但是也有相关科研机构,利用铣挖头替代破碎锤,其优点是可以铣削平面和沟槽,但缺点是铣削施工效率极其低下,小范围内的巷道修复可以利用,但大面积的修复施工没有优势,而且铣削头成本较高[3-4]。对于扒矸常规方式是利用挖斗或扒爪进行,这2种方式没有太大的区别,主要根据整机布局而定。运矸和装矸可以通过带式运输机或刮板运输装置解决,带式运输机运行简单易设计易维修,但是在高速运矸时,施工效率较低,而且带式运输机最大的问题是不耐磨,抗冲击性能差。刮板输运输装置可靠性高、运矸稳定,但是机械结构复杂,制造成本较高。
1.2 结构布局的确定
在进一步了解掌握煤矿巷道围岩修复治理施工工艺基础上,再结合施工特点,修复机结构、布局宜采用以下方案:一种新型工作机构,将破碎锤集成在小臂上,小臂下方设计有挖斗,通过这种结构解决矸石的破碎和扒取,破碎锤和挖斗切换速度快,提高施工效率。采用刮板运输装置解决运矸和装矸,而且在刮板运输装置下方设计2组升降油缸,主要是为适应不同煤矿运矸车高度等问题。
在整机上,由于电机、电柜及电缆卷筒等安标受控部件影响,将修复机设计成非对称式三列布局,煤矿用巷道修复机整体外形结构如图1。另外,为解决修复机反复移动,导致电缆拖拽困难等问题,在修复机左侧设计安装电缆卷筒。为解决破碎锤在破碎施工中,产生灰尘和火花等危险因素,设计一款除尘水泵并配备雾化喷头,降尘抑爆。

图1 煤矿用巷道修复机整体外形结构
1.3 主要技术参数
修复机主要用于煤矿井下低矮变形巷道围岩修复治理施工作业,机身高度和宽度在结构尺寸允许的情况下尽可能小,而且施工地点较为特殊,故采用重型摩擦式履带,修复机挖装能力50 m3/h,扒取宽度3.45 m,扒取高度3.5 m,卸载高度1.4~1.8 m,电机功率55 kW,外形尺寸7.8 m×1.6 m×1.85 m。
2 关键技术
2.1 工作机构
煤矿用巷道修复机是一种集凿、挖、运、装于一体的巷道修复设备,其工作机构是解决修复机凿和挖2种功能最为重要的执行机构。因此,修复机工作能力的大小主要取决于工作机构,工作机构由偏转机构、偏转油缸、大臂油缸、小臂油缸、大臂、小臂、挖斗油缸、破碎锤伸缩油缸、破碎锤及挖斗组成[5],工作机构外形结构如图2。偏转机构通过销轴和螺栓与车体平台可靠连接,大臂在偏转油缸的推动下沿车体方向左右偏转,最大扒取宽度3.45 m,为保证工作机构可靠性和安全性,将2组缸径90 mm,杆径63 mm的大臂油缸和小臂油缸设计到大臂和小臂下方,防止油缸碰撞损坏。另外,在小臂上方设计有破碎机构,破碎锤在破碎锤伸缩油缸推动和收回的作用下沿导轨方向进行滑动,最大滑动距离250 mm。挖斗通过挖斗油缸和四连杆机构相连,在挖斗油缸的作用下实现扒矸施工作业[6],最小扒装能力50 m3/h。

图2 工作机构外形结构
2.2 刮板运输装置
刮板运输装置主要用于对矸石的装载和转运,而且刮板运输装置一般为设备上不可拆卸的最长结构件,直接影响整机的结构尺寸[7-8]。刮板运输装置主要由前运输槽、中运输槽、刮板链条、中后运输槽、后运输槽、后升降油缸、前升降油缸及连杆机构等部件组成,刮板运输装置外形结构如图3。
运输能力的确定:设计运输能力不小于50 m3/h,矸石堆积密度为1.5 g/cm3,所以要求刮板运输装置运输量不小于65 t/h[9-10]。刮板运输装置的输送量Q为:

式中:ρ为煤堆积密度;v为链速;A为断面面积。
当液压系统在额定工况下,运输装置连续工作时运输量可以达到229 t/h,满足设计要求。
可以看出,要满足一定的输送量,既可以选取较大的运煤断面和较低的链速,也可以选取较高的链速和较低的运煤断面,怎样选取更为合理,则要从整机结构和性能等方面综合考虑。链速低而运煤断面大,则会显得设备笨重;链速高而运煤断面小,则会加大磨损,缩短整机的使用寿命,并且速度太高,还会破坏煤层流动的稳定性,产生逆流悬浮,不但不能提高输送量,反而增加了能量损耗。

图3 刮板运输装置外形结构
刮板运输装置有4件运输槽,各运输槽之间通过M20高强度螺栓连接,并且在螺栓与螺母之间设计安装有NORDLOCK防松垫圈,防止各运输槽之间晃动,影响运矸施工效率。在刮板运输装置运料底面和侧面焊接BTW1耐磨钢板,提高运料接触面的耐磨性能,而且在刮板运输装置下方设计有后升降油缸、前升降油缸和连杆机构,其目的是刮板运输装置在装矸和运矸过程中,通过调整2组油缸的不同行程,达到卸料高度在1.4~1.8 m范围内任意可调,以适应各个煤矿不同运矸车车厢高度,保证运矸效率,提高巷道修复施工工作效率。
2.3 履带车体
履带车体是修复机的底盘,主要决定修复机的行走及上装结构的安装。履带车体主要由车体平台和行走履带组成。车体平台采用内凹式设计,履带侧装,在布局上采用非对称式三列布局,满足各加工件和外构件的安装空间。行走履带采用单边扭矩22 000 N·m的重型摩擦式履带,爬坡能力15°,接地比压0.07 MPa,行走速度2.7 km/h,其允许设备总重12 000 kg。
2.4 操作室
操作室是修复机的控制中心,修复机所有执行机构的动作都在操作室内完成。操作室由压力表、四方向先导手柄、先导手柄、脚踏先导阀、防护棚及安装架组成,操作室外形结构如图4。修复机压力表选用2个2.5 MPa和2个40 MPa,分别测量一泵、二泵回油压力和一泵、二泵压力。2组四方向先导手柄分别控制大臂举升、大臂降落、大臂左摆、大臂右摆和小臂举升、小臂降落、挖斗收回和挖斗打开。先导手柄分别控制刮板马达、刮板升降油缸、破碎锤及电缆卷筒等。脚踏先导阀分别控制2条履带的行走及后退。防护棚设计成可拆卸式,提高修复机在低矮变形巷道通过率。安装架主要用于修复机八联阀的安装。

图4 操作室外形结构
2.5 液压系统
修复机液压系统主要由泵站、各工作机构和辅助回路组成。泵站采用3泵串联结构,油泵Ⅰ和油泵Ⅱ为变量泵,油泵Ⅲ为定量泵,油泵Ⅰ主要控制大臂、小臂、斗杆、铲斗等工作机构,油泵Ⅱ主要控制刮板马达、电缆卷筒、刮板升降油缸等工作机构,油泵Ⅲ出油直接与风冷散热器马达相连。
液压系统的油泵Ⅰ和油泵Ⅱ采用LUDV(负载独立流量分配)控制系统,能实现对不同负载压力的多个执行元件同时进行快速与精确控制,各个元件互不干涉,操作性能好,执行起点和工作速度(流量)只与操纵手柄角度有关,与负载压力无关,任一执行元件都有可支配泵的全流量或需要的流量[11]。为防止系统过载,油泵Ⅰ工作压力由多路换向阀内设的安全溢流阀限定,调定压力为21 MPa,油泵Ⅱ工作压力调定压力为21 MPa,使用时不得超调。
通过后期测试表明,当变量泵流量饱和时,负载敏感多路阀的流量以变量泵最大流量为基础,仍按照比例分配正常工作,确保整机在工作中各工作机构回路相互独立,不会因为负载的变化导致整机工作的不协调。
3 现场应用
2016年7月,修复机工业性试验在淄矿集团亭南煤矿3#煤层305进风巷进行,底板修复施工示意图如图5。亭南煤矿305工作面进风巷底板多为灰黑色泥岩或粉砂质泥岩,在工作面超前支承压力和相邻工作面采空区等多重因素影响下,巷道底鼓严重。修复前巷道高度仅为2.3~2.7 m,按矿方要求将巷道高度修复至(3.5±0.2)m。底板修复施工总进尺约300 m,平均修复效率2.5 m/h,起底施工人员由8人降为3人[12-13],试验过程中,修复机运转良好,各部件动作连续流畅,且人工成本、人均方量等指标显著改善,保障了该矿305工作面回采工作的顺利进行。
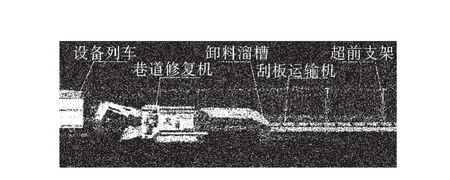
图5 亭南煤矿底板修复施工示意图
4 结语
1)研制的WPZ-55/50L型煤矿用巷道修复机参数设计合理,整机机身窄,解体性好,自动化程度高,便于井下搬迁运输,具备自动卷放电缆功能,配有降尘装置,降尘抑爆,施工安全性高,液压系统采用LUDV控制,操作灵活方便,可靠性高。
2)整机具备凿、挖、运、装为一体的功能,配合煤矿井下带式运输机或刮板运输机可以实现连续运输作业,提高巷道修复施工工作效率。随着后续研究的深入,并结合现场施工特点,修复机可以配备机载锚杆钻机,对于服务期较长的开拓巷道可采取巷道围岩注浆、高预应力锚杆(索)等技术重新加固施工。
3)现场工业性试验结果表明WPZ-55/50L型煤矿用巷道修复机各项技术指标满足设计要求,并且充分证明修复机结构及液压系统设计的合理性和可靠性,该设备的成功研制为煤矿井下低矮变形巷道围岩修复治理的快速可靠施工提供了装备保证。

猜你喜欢
包装与食品机械(2021年5期)2021-11-06 11:40:14
环境技术(2021年4期)2021-09-11 08:26:06
制造技术与机床(2019年12期)2020-01-06 03:17:44
组合机床与自动化加工技术(2019年5期)2019-05-24 03:48:50
水电站机电技术(2018年2期)2018-03-05 11:03:42
电线电缆(2017年1期)2017-05-17 03:52:06
载人航天(2016年4期)2016-12-01 06:56:21
广东技术师范大学学报(2016年5期)2016-08-22 09:07:26
综合智慧能源(2014年1期)2014-09-10 07:07:40
中国工程机械学报(2014年3期)2014-05-25 08:31:14
