
滑行艇静水性能试验研究
2019-04-30 06:30:16申云磊高霄鹏罗富强
武汉理工大学学报(交通科学与工程版) 2019年2期
申云磊 高霄鹏 罗富强
(海军工程大学舰船与海洋学院 武汉 430033)
0 引 言
滑行艇在高速航行时依靠水动升力支撑艇重,将艇体托出水面进入滑行状态,由于其外形简单,工业技术要求不高,因而得到了广泛的应用[1].随着无人技术拓展到海洋空间,水面无人艇作为一种智能舰艇受到人们的广泛关注,滑行艇因为其优越的水动力性能,成为无人艇应用最多的高性能船型[2].
滑行艇在航行过程中随着航速的提高,会出现纵向周期性的升沉和纵摇耦合运动即“海豚运动”,限制了滑行艇航速的进一步提升.重心过于靠后及相应的负荷过分集中在艉部是引起海豚运动的重要原因[3].因此对于艇型已经确定的滑行艇,提高其运动稳定性的方法一般是调节重心纵向位置,通过降低艇体的艉倾姿态降低高速滑行过程中的纵倾角,从而提高海豚运动的临界速度点,然而考虑到传统的滑行艇总体布置,重心的调节能力非常有限,.为改善滑行艇的性能,除了对艇体本身型线特征进行优化外,应用一些附体,如,阻流板、尾压浪板等,可以简单有效的降低滑行艇的阻力,并提高运动稳定性[4-5].
阻流板是一种垂直安装在艇尾封板处的具有很大长宽比的平板,可以在航行过程中改变艇底压力分布,影响到尾部的兴波情况,降低了鸡尾流的高度,减小了航行纵倾角,不仅能够改善滑行艇的阻力性能,还能改善高航速下的运动稳定性,是一种简单高效的附体设备[6-8].在实际运用中,阻流板的作用长度是影响其效能的关键,过短的阻流板无法有效的调整滑行艇航行姿态,过深的阻流板则会产生过大的埋首力矩,发生埋首现象,考虑到实际安装的需要,阻流板的安装位置也会产生不同的效果[9-10].鉴于理论计算的及数值方法仍不能精确的计算滑行艇性能,模型试验仍是必不可少的手段[11-12].本文通过模型试验对加装阻流板的滑行艇模型进行研究,考察不同长度、不同安装位置以及不同重心位置对滑行艇静水阻力和纵向运动稳定性的影响效果,对阻流板的作用机制和对滑行艇水动力性能的影响进行分析.
1 模型试验
1.1 模型主尺度
为保证船模在高航速下能够有较好的强度,船模使用木质结构经打磨、喷漆、防漏等一系列加工而成,无因次主尺度见表1.滑行艇排水量与阻力的无因次化见表2.

表1 模型无因次化尺度
注:B-模型宽度,m;L-模型长度,m;H-型深,m;d-模型吃水,m;Xg-重心距尾封板距离,m.
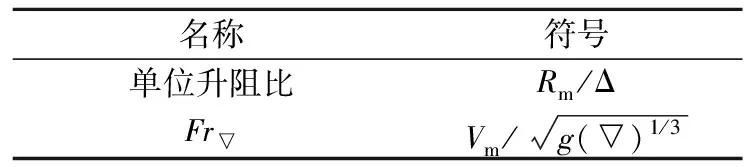
表2 拖曳模量纲-的纲化主要参数
注:Rm-阻力,N;Δ-排水量,kg;▽-排水体积,m3;Vm-模型拖曳速度,m/s.
1.2 试验内容
模型试验在中国特种飞行器研究所高速拖曳水池进行,试验水池长510 m、宽6.5 m、水深5 m,车速度最高可达22 m/s.阻力的测量采用BLR-1型拉力传感器,量程为0 ~40 kg,精度为0.2%.纵倾测量采用倾角传感器,精度为0.1°.升沉采用拉线式方法测量,误差小于1%.模型见图1,阻流板的安装见图2.阻流板的作用部分是指超出艇体表面的突出部分,见图3.
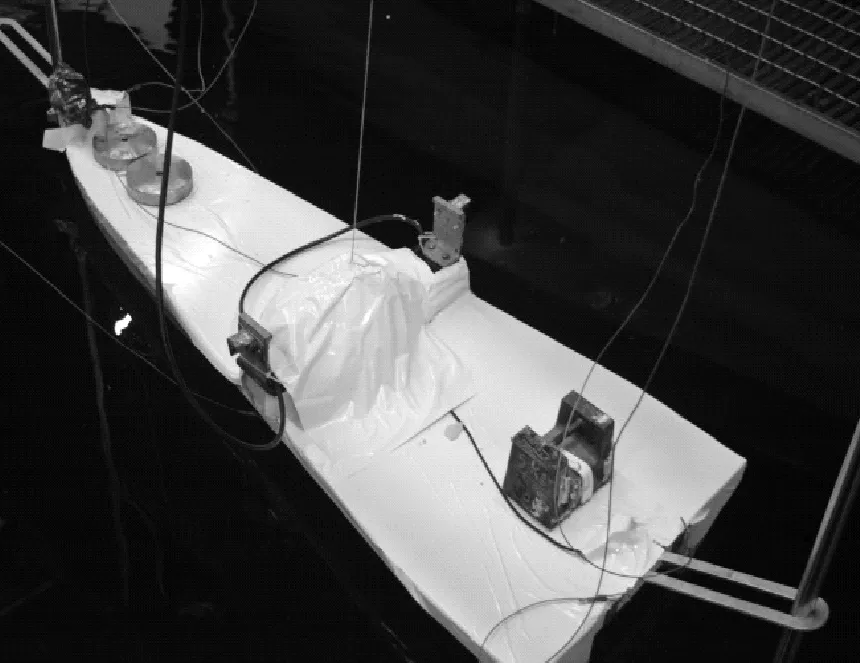
图1 试验模型

图2 阻流板安装

图3 阻流板作用示意图
试验过程中采用的两种阻流板的安装位置,分别是尾封板基线处和尾封板舭部,共设计六种试验工况见表3.
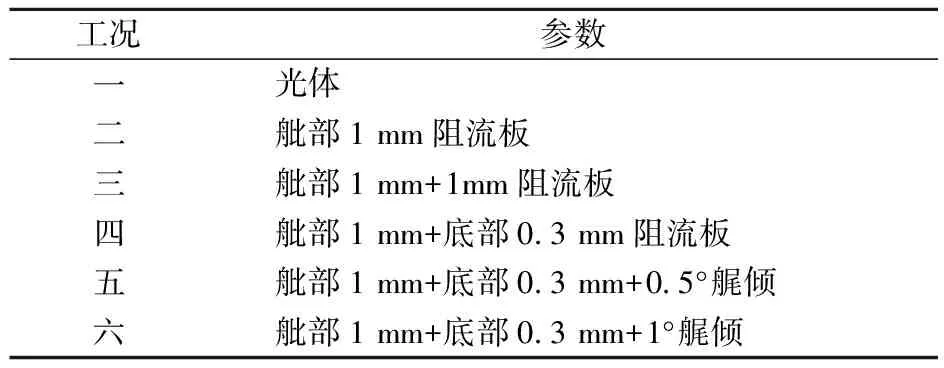
表3 试验工况对应参数
试验过程中,对带阻流板工况测试时,先进行光体最高航速下的试验,若可以稳定运行,则从低速到高速分别进行拖曳,监测滑行艇的阻力、倾角、升沉,并对鸡尾流和飞溅进行观察.发生海豚运动或者横向失稳则停止试验,调整模型,继续下一工况的试验.其中工况三在Fr▽5.64的速度下发生了失稳,原因是阻流板的所产生的埋首力矩过大,属于危险工况,且没有进行中低速的拖曳.
2 结果与分析
2.1 单位升阻比对比
通过调整模型的阻流板状态和重心位置得到不同工况下的滑行艇单位升阻比变化,图4为阻力性能的变化规律.
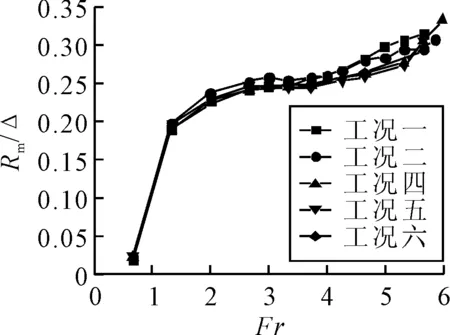
图4 不同工况下的模型无因次阻力对比
工况一到六的最高航速对应体积弗劳德数依次为Fr▽=5.64、5.84、5.97、5.64、5.64.最高速度即在试验中再想进一步提速时,模型纵向失稳,发生了海豚运动,导致停车.由图4可知,加装阻流板舭部1 mm与底部0.3 mm下的滑行艇性能最优,不论是舭部还是底部,加装阻流板后均可以延迟海豚运动的发生,提高模型的最高航速.重心位置的后移,理论上会提前海豚运动发生的临界点,试验中在加装阻流板的情况下,重心位置的后移并没有改变模型的最高航速(与光体对比),也进一步说明阻流板对于抑制海豚运动的发生有积极作用.
图4中阻力曲线整体的呈阶梯状分布,在2.5
2.2 纵倾角对比
对比不同工况下的纵倾角见图5.
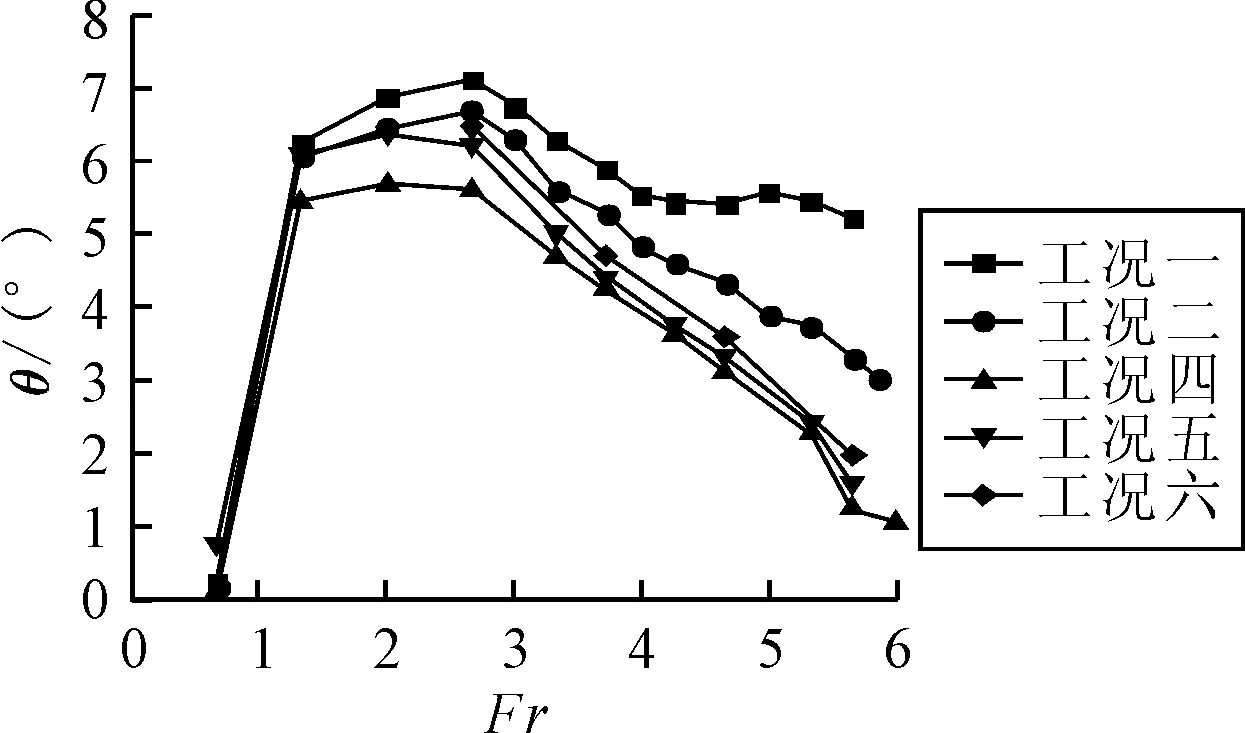
图5 不同工况下的模型纵倾角对比
根据图5可知在Fr▽=2.6时,纵倾角达到最大值,然后迅速降低,存在着明显的越峰现象,符合滑行艇的纵倾角变化规律.阻流板可以明显降低整个航行过程中的纵倾角,在Fr▽>4的范围内这种作用更加明显,最大降低幅度达到5°.不同的安装位置均能起到相似的效果,并且重心位置的移动不影响阻流板对倾角的抑制作用.
纵倾角是影响滑行艇静水性能的重要因素,在航行过程中,降低航行纵倾角,有利于纵向运动稳定性,并降低航行阻力.考虑到实际总体上的诸多限制,除了改变艇体本身型线特征以外,通过安装不同位置以及不同深度的阻流板,可以有效的调节航行姿态,获得最优的滑行艇阻力性能.
2.3 升沉值对比
对比不同工况下的升沉值见图6.随着航速的提高,艇体抬升,动升力逐渐代替静浮力成为艇体的支撑力.在Fr▽<4.6之前,不同工况下的升沉值没有明显差别.在Fr▽>4.6以后,阻流板对升沉的影响比较明显,最大变化幅值为15 mm,艉倾状态对阻流板的作用影响较小.
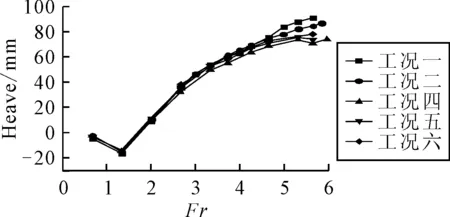
图6 不同工况下的模型升沉值对比
滑行艇的升沉值反映了其航行过程中湿表面积的大小进而影响摩擦阻力值.从试验结果可以看出,阻流板会降低升沉值,导致湿表面积增加.实际上滑行艇的阻力与倾角和升沉密切相关,结合总阻力、倾角与升沉的变化规律,倾角对阻力的影响更为明显,应该重点关注.
3 结 论
1) 长度合适的阻流板可以提高滑行艇水动力性能,降低静水阻力和提高滑行艇的海豚运动临界速度点,在4.5 2) 阻流板在尾封板舭部与底部安装均能起到提升滑行艇性能的效果,在实际工程运用中可以考虑总体布置,选择不同的位置进行安装.重心位置的改变导致艇体小于1°内的艉倾姿态不会对阻流板的作用效果产生明显影响. 3) 阻流板对于改善滑行艇中高速航行性能有积极的作用,随着控制技术的发展,根据艇体状态的实时监测数据判断最优的阻流板参数并进行控制,可以使得滑行艇在不丧失运动稳定性的情况下以最优攻角姿态航行,获得最优的快速性.根据加装阻流板的模型试验可以为阻流板参数的最优配置提供参考,有较大的实际意义. 4) 一般来说,滑行艇均是在风浪环境中运行,但静水阻力性能决定了其阻力性能的基本特点,对于整体性能的优化有一定的帮助.对于阻流板对滑行艇在波浪中的性能影响,以及航行过程中阻流板不对称配置下对横稳性和航向的影响有进一步的探索空间.
猜你喜欢
船舶与海洋工程(2022年6期)2023-01-12 07:54:02
舰船科学技术(2022年10期)2022-06-17 06:25:14
中国舰船研究(2022年2期)2022-04-26 07:51:20
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
汽车观察(2021年11期)2021-04-24 20:47:38
学生天地(2019年30期)2019-08-25 08:53:08
中学生英语(2017年6期)2017-07-31 21:28:55
青年歌声(2017年6期)2017-03-13 00:57:56
中国舰船研究(2016年6期)2016-12-12 02:35:26
幼儿时代·故事妈妈(2004年3期)2004-03-17 07:52:00
