
基于VSIMM-CKF的机场场面运动目标跟踪*
2019-04-30 05:40:34孙寿宇宫淑丽
武汉理工大学学报(交通科学与工程版) 2019年2期
孙寿宇 宫淑丽
(南京航空航天大学民航学院 南京 210016)
0 引 言
机场场面管理需要对场面活动区进行有效的交通管理,国际民航组织于2004年提出在机场部署“先进场面运动引导控制系统”(advanced surface movement guidance and control system, A-SMGCS)的概念[1],A-SMGCS概念提出基于保障机场安全和增大机场容量两大因素,实现监视、路径选择、引导和控制功能[2],其中监视功能是整个系统功能的基础[3].目前我国大型国际枢纽机场均安装有场面监视雷达(surface movement radar, SMR),配合目视监视、语音通信等实现对机场场面活动区域的运动目标的监视与引导[4].由于SMR测量数据含有噪声,需要对SMR得到的航迹数据进行滤波处理.常用的非线性估计方法是基于传统的Taylor级数展开的扩展卡尔曼滤波(extended kalman filter, EKF)算法.EKF思想是将非线性系统一阶线性化,但是线性化过程会带来近似误差.Julier[5]提出的无迹Kalman滤波(unscented Kalman filter, UKF)以无迹变换(unscented transformation, UT)为基础,摒弃了对非线性函数线性化的传统做法,因而计算精度较高.UKF虽然不需要计算Jacobin矩阵,但只有选择合适的参数才能保证其收敛性.Arasaratnam等[6]提出的容积卡尔曼滤波(cubature Kalman filter,CKF)基于球面径向积分准则,利用2n个具有相同权重的容积点对状态的概率密度分布函数进行逼近,避免复杂的雅克比矩阵的运算,提高了滤波的精度和稳定性.许多学者基于CKF做了大量研究,如文献[7],针对容积卡尔曼滤波器在递推过程中,计算量大、数值不稳定等问题,提出平方根容积卡尔曼滤波.文献[8]将牛顿高斯迭代法引入了平方根容积卡尔曼滤波提出改进迭代平方根容积卡尔曼滤波,文献[9]基于采样点正交变换改进CKF提出了TCKF.
交互式多模算法(interacting multiple model, IMM)通过马尔可夫链可实现各个模型之间的软切换,增加了模型之间的交互功能.文献[10]将IMM算法和CKF相结合对弹道再入目标跟踪研究,文献[11]将IMM算法和EKF相结合对中段弹头跟踪研究,文献[12]将IMM算法和UKF相结合对机场场面目标跟踪研究.IMM是一种固定结构的多模型算法,Li[13]创立了使用时变模型集的变结构交互式多模型算法(variable structure interacting multiple model, VS-IMM).该算法可以优化模型集,减少系统的计算量,提高跟踪的精度.文献[14]采用自适应网格对模型集进行调整,结合基于S修正RBUKF滤波算法,文献[15]提出基于球面径向容积规则的平滑变结构滤波算法.本文将VSIMM算法与CKF相结合,采用VSIMM-CKF算法,应用于机场场面监视.
1 场面运动目标运动模型建立
1.1 上海虹桥机场地形信息
上海虹桥国际机场采用双跑道、双航站楼运行管理的模式.滑行道系统为进、出港飞机提供跑道和机坪之间的联系通道,滑行道系统关系着机场的运行效率和运行安全水平[16],见图1.为了能够统一时间实现多架飞机的穿越需求,提高飞机运行效率,飞行的跑道穿越滑行是不可避免的,保障飞机安全穿越跑道滑行对此进行场面监视至关重要.

图1 虹桥机场北流向机场地形信息图
1.2 飞机运动模型
飞机的运动包含三种运动:在跑道上加速运动,在跑道与滑行道或滑行道与滑行道连接处的匀速转弯运动,在滑行道上匀速直线运动.
X(k)=FCV(k-1)X(k-1)+GCV(k-1)W(k-1)
(1)
式中:FCV为CV模型的运动转移矩阵.
(2)

X(k)=FCA(k-1)X(k-1)+
GCA(k-1)W(k-1)
(3)
式中:FCA为CA模型的运动转移矩阵.
(4)

X(k)=FCT(k-1)X(k-1)+
GCT(k-1)W(k-1)
(5)
式中:FCT为CT的运动转移矩阵.
(6)
2 容积卡尔曼滤波
为了解决求解多变量非线性函数与高斯密度函数乘积的积分,Arasaratnam提出容积卡尔曼滤波,即通过三阶容积积分法则,利用2n个容积点加权求和近似计算加权高斯积分,对于函数f(x)的加权高斯积分:
(7)
式中:N(x;μ,P)为x服从均值μ和协方差阵P的正态分布;S满足S·(S)T=P,具有2n个元素的容积点集{ξi}具有如下形式.
CKF算法流程见图2.
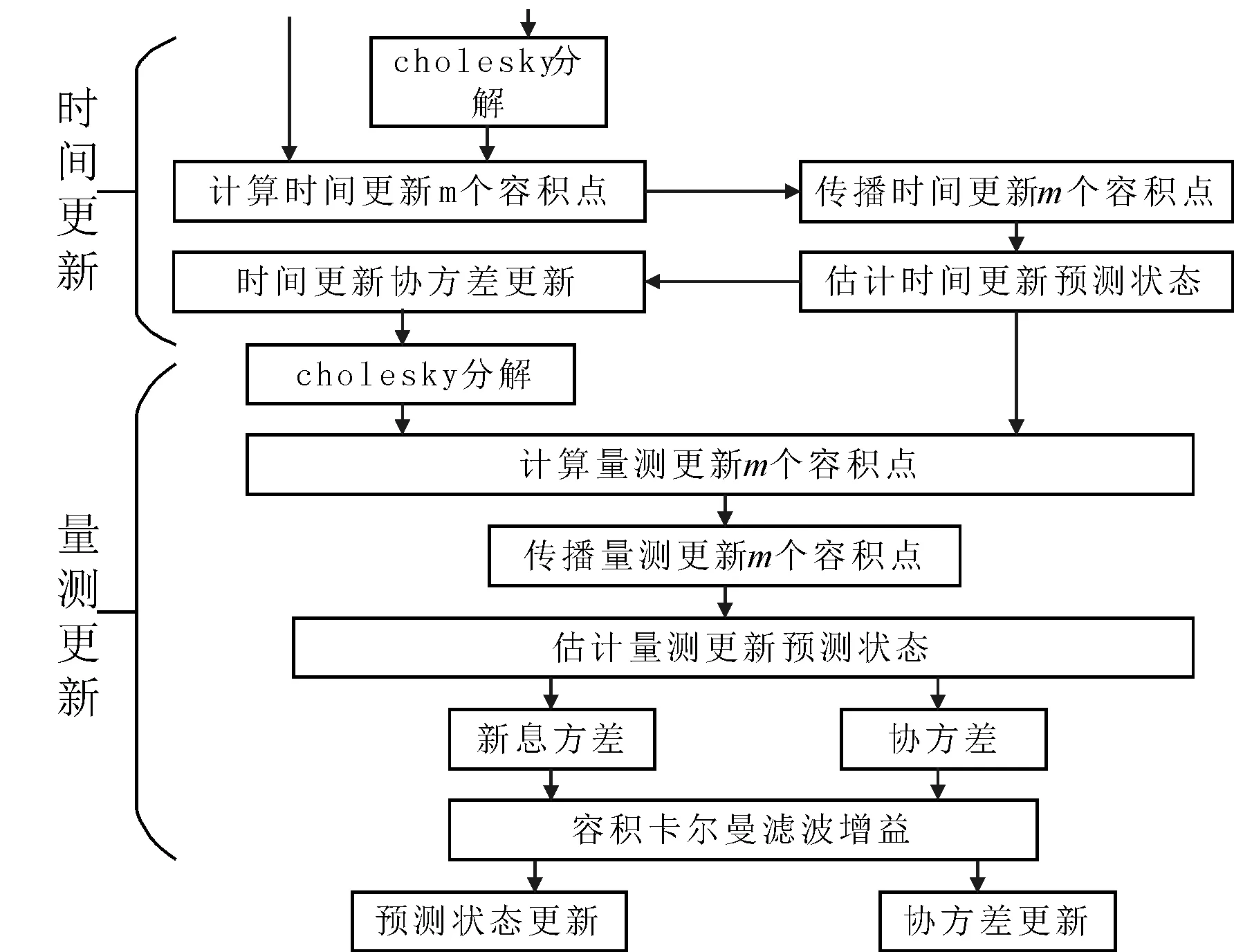
图2 CKF算法流程图
具体流程如下:
1) 时间更新
①假设在第k时刻后验密度函数
p(Xk-1|Dk-1)=N(xk-1|k-1,Pk-1|k-1)已知,Pk-1|k-1可以分解为
(8)
②计算容积点(i=1,2,…,m)
Xi,k-1|k-1=Sk-1|k-1ξi+xk-1|k-1
(9)
这里m=2n.
③传播容积点(i=1,2,…,m)
(10)
④估计预测状态
(11)
⑤协方差更新
(12)
2) 量测更新
①Pk|k-1分解
(13)
②计算容积点
Xi,k|k-1=Sk|k-1ξi+xkξk-1
(14)
③传播容积点
Zi,k|k-1=h(Xi,k|k-1,uk)
(15)
④计算量测预测值
(16)
⑤计算新息方差
(17)
⑥计算协方差矩阵
(18)
⑦计算容积卡尔曼滤波增益
(19)
⑧预测状态更新
xk|k=xk|k-1+Wk(Zk-zk|k-1)
(20)
⑨协方差更新
(21)
3 基于VSIMM-CKF算法
运动目标的跟踪研究主要取决两个方面,首先,模型集的正确建立可以准确反应机动目标的运行状态;其次,合适滤波算法可以有效滤除量测原因带来的误差.VSIMM算法模型集和概率转移矩阵可根据目标的运动情况和地图及其他因素等可变,在不同条件下使用不同的模型集,不仅能减少系统的计算量,而且能够保证所选模型与系统运动相匹配,使MM估计器达到最优,提高跟踪的精度.而对于非线性滤波问题,CKF算法比UKF算法更加严谨,可避免参数选取不当而造成滤波器性能下降.VSIMM-CKF算法利用VSIMM算法对模型集优化,同时在滤波方面采用更为严谨的CKF算法.
3.1 VSIMM算法

3.2 VSIMM-CKF算法
结合CKF的变结构多模算法流程见图3.
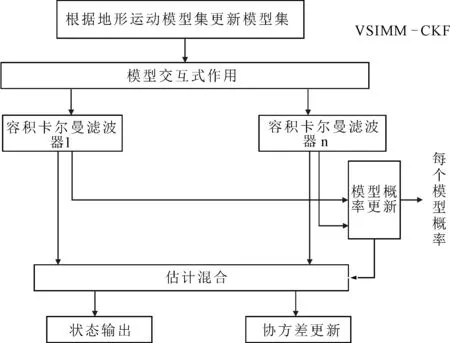
图3 VSIMM-CKF算法流程图


(22)
模型s的预测概率为
(23)
模型的混合概率为
(24)
(25)
(26)
3) CKF滤波见第2节
4) 模型概率更新 模型概率
(27)
(28)
5) 估计融合
(29)
(30)
4 仿真及结果分析
4.1 仿真场景设置
假设飞机在所在初始位置为(200 m,200 m),沿着跑道方向以初始速度为50 m/s,加速度为-2 m/s2直线运动20 s,然后以1 (°)/s的转弯速率运动到B3,在40~60 s时沿着B3做匀速直线运动,然后以10 (°)/s的转弯速度运动10 s运动至H3,最后在70~80s沿着H3做匀速直线运动.根据机场地形条件建立模型集,模型1为匀速直线运动;模型2为加速直线运动;模型3为转弯率为1 (°)/s的左转弯运动;模型4为转弯率为5 (°)/s的右转弯运动;模型5为转弯率10 (°)/s的右转弯运动.雷达采样周期为1 s,考虑到SMR精度,距离方差19,方位角方差0.5.分别对IMM-EKF,VSIMM-UKF,VSIMM-CKF进行50次蒙特卡洛仿真实验.
4.2 仿真结果分析
图4为仿真过程中VSIMM-CKF每个模型的概率.
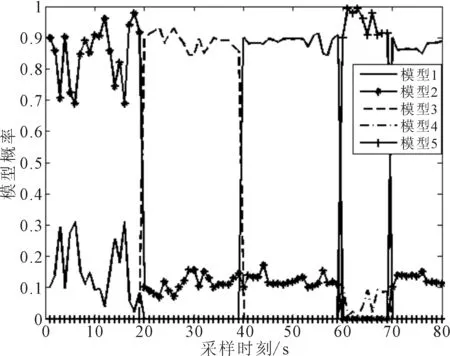
图4 VSIMM-CKF每个模型算法概率
由图4可知,VSIMM-CKF在每个时刻删除了不必要的模型,从总模型集中选取了能反映目标真实运动状态的2种运动模型进行了融合估计.
图5为X,Y方向的位置RMSE曲线,图6为X,Y方向的速度RMSE曲线.
由图5可知,在初始时刻由于滤波器没有跟踪上,所以误差X,Y位置误差都较大.图5a)中VSIMM-CKF在模型转换时刻20 s左右、40 s左右等模型转换时刻,即飞机做机动运动时误差较大.而在非模型转换时刻误差基本维持在5 m以下,在模型转换时刻峰值RMSE值大概16 m.IMM-EKF在模型转换时刻峰值约为48 m,VSIMM-UKF在模型转换时刻峰值约为28 m.图6中一开始飞机沿着X轴平行运动不存在Y轴方向位移,所以误差较低,在20 s左右飞机做机动运动时,误差会增加.VSIMM-CKF峰值RMSE值为18 m,IMM-EKF峰值RMSE值为58 m,VSIMM-CKF峰值RMSE值约为28 m.由图6可知,VSIMM-CKF误差明显要小于IMM-EKF和VSIMM-UKF.
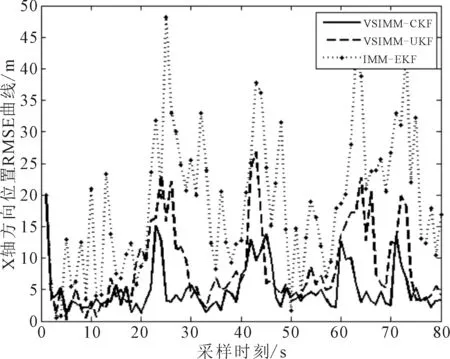
a) X方向
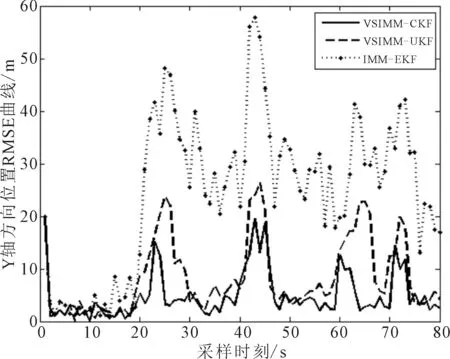
b)Y方向
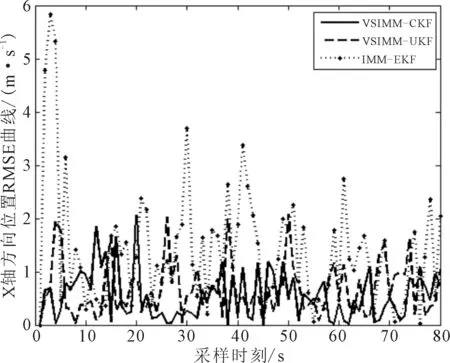
a) X方向
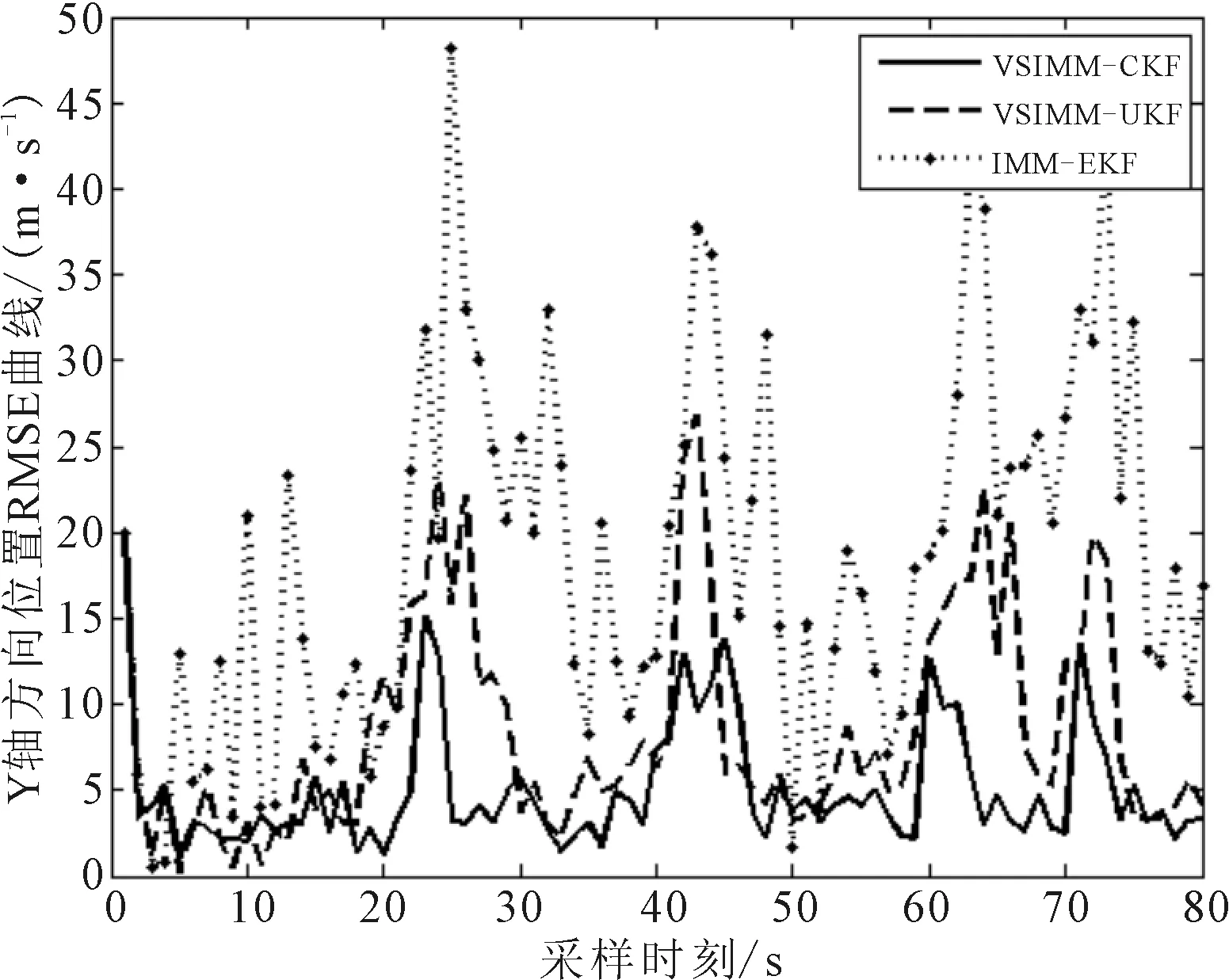
b)Y方向
表1为三种算法均方根误差均值和运行时间.表中IMM误差明显高于VSIMM,主要是由于IMM算法中每个时刻需要计算所有模型的概率,对于模型较多时会增加计算的复杂度,导致精度下降.由于VSIMM-UKF需要进行频繁的UT变换,也增加了计算的复杂度,而且,UKF可能会由于 点选取不当而导致精度下降.
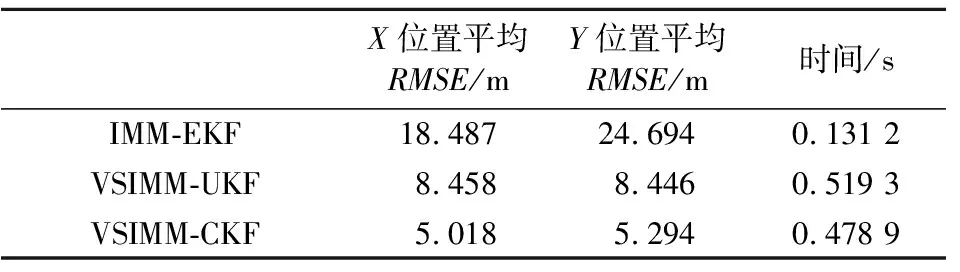
表1 三种算法均方根误差均值和运行时间对比
5 结 束 语
针对机场场面上飞机的运动为例,结合上海虹桥机场地形信息,研究了基于SMR的机场场面单目标飞机运动监视.根据飞机的实际运动和机场地形信息,建立了五个运动模型.VSIMM算法使用时变的模型集,可避免IMM算法中模型之间不必要的竞争,减少计算量.CKF作为一种非线性滤波方法,以其对随机变量非线性变换后概率分布具有良好的逼近精度的优势得以发展.本文提出将CKF应用于VSIMM中,将VSIMM-CKF应用于机场场面飞机的监视中.并将VSIMM-CKF与IMM-UKF,VSIMM-UKF进行了仿真对比,仿真结果表明,VSIMM算法跟踪精度明显优于IMM算法,而且VSIMM-CKF计算时间要优于VSIMM-UKF,因此,将VSIMM-CKF应用于机场场面移动目标监视中能很好地完成单目标跟踪,精确实时的单目标跟踪算法也可以解决机场多目标跟踪问题.
猜你喜欢
小学生学习指导(高年级)(2022年4期)2022-04-26 06:17:20
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
读写算·高年级(2017年6期)2017-06-27 08:16:27
系统工程与电子技术(2016年2期)2016-04-16 05:17:02
癌症进展(2016年10期)2016-03-20 13:15:42
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2015年1期)2015-08-22 11:16:28
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
电子设计工程(2014年20期)2014-02-27 12:01:00
