
提高能效的自主供电系统智能控制算法模型建立与仿真
2019-04-28 12:24李红斌王嘉伟张晶晶王蕊窦晨
现代电子技术 2019年24期
关键词:太阳能电池
李红斌 王嘉伟 张晶晶 王蕊 窦晨

摘要:为解决太阳能电池为机器人系统提供能量效率低下的问题,文中设计开发一种提高能效的自主供电系统。其采用基于模糊逻辑扰动观测算法的智能MPPT充电控制器,该算法通过使用足够精确的预测和自适应算法克服了在功率波动与最大功率点跟踪时间固定等方面的缺点,提高了太阳能电池的效率。为了研究模糊逻辑器件在MPPT算法中的实现,文中在Matlab/Simulink环境下开发了该系统的仿真模型,包括太阳能电池、MPPT控制器、蓄电池和负载。仿真结果表明,MPPT技术的应用使太阳能系统能量产生量提高了23%;将模糊逻辑算法引入MPPT控制器大幅提升了最大功率点跟踪的速度,且抵消了电压波动,从而使功率不足减少了2%。
关键词:太阳能电池;自主供电系统;充电控制器:算法模型;智能控制算法;仿真模型开发
中图分类号:TN876-34:TP393
文献标识码:A
文章编号:1004-373X( 2019) 24-0183-04
0 引 言
电源是智能产业面临的主要问题之一,目前主要是通过提供太阳能电池来解决电源问题。然而由于太阳能电池能效较低,因此该方法存在诸多缺点。人们采取了一些方法来提高太阳能电池的能效,这些方法中包括使用MPPT电荷控制器[1-4]。最大功率点跟踪(MPPT)是通过获取光伏组件和风力发电机组最大可能的功率输出来提高能效的方法。MPPT是利用数字器件对电流电压曲线(CVV)进行分析,以确定最佳电压一电流对,从而提供最大的输出功率。
最常见的MPPT算法是扰动观测算法。在该方法中,MPPT装置通过微量改变太阳能装置的输入电阻,从而改变太阳能装置的电压,并测量功率;若功率增加,控制器将继续改变相同方向的电压,直到功率停止增加,如图1所示。
扰动观测算法的缺点是功率波动和固定的“爬升”(最大功率点跟踪)时间[5],“爬升”时间越短,波动幅度越大,功率越低。而波动幅度功率的减小导致最大功率点跟踪时间的增加,但这些问题可以通过使用足够精确的预测和自适应算法来解决[6-7]。
1 自主供电系统
具有太阳能发电系统的智能设备一般由质量轻、强度高的材料和耗电量小的电子电路组成,较低的能耗与结构重量使太阳能电池的应用更具潜力。设计太阳能发电系统有多种选择[8],本文主要考虑太阳能电池联合发电系统。如前所述,使用MPPT电荷控制器可以提高太阳能供电系统的能效,而MPPT电荷控制器可通过单板微控制器(Arduino,MBED等)来实现。
基于单板微控制器的光伏发电充电器的设计思想是:以单片机控制的巴克变换器为充电器,当光伏组件的电压/电流增加时,PWM发生器增加脉冲频率,从而增加输出电流。
2 系统仿真建模
模糊逻辑控制是一种人工智能的控制方式,其能够使系统按照类似人的思维方式去考虑推理一些类似于“远”“近”“快”“慢”等具有模糊概念的问题。通过模糊控制系统对充电系统的电压、电流进行采样并计算功率,判断出工作点与最大功率点的位置关系,进而使系统能够自动调节最佳输出电压,使系统稳定在最大功率点工作。
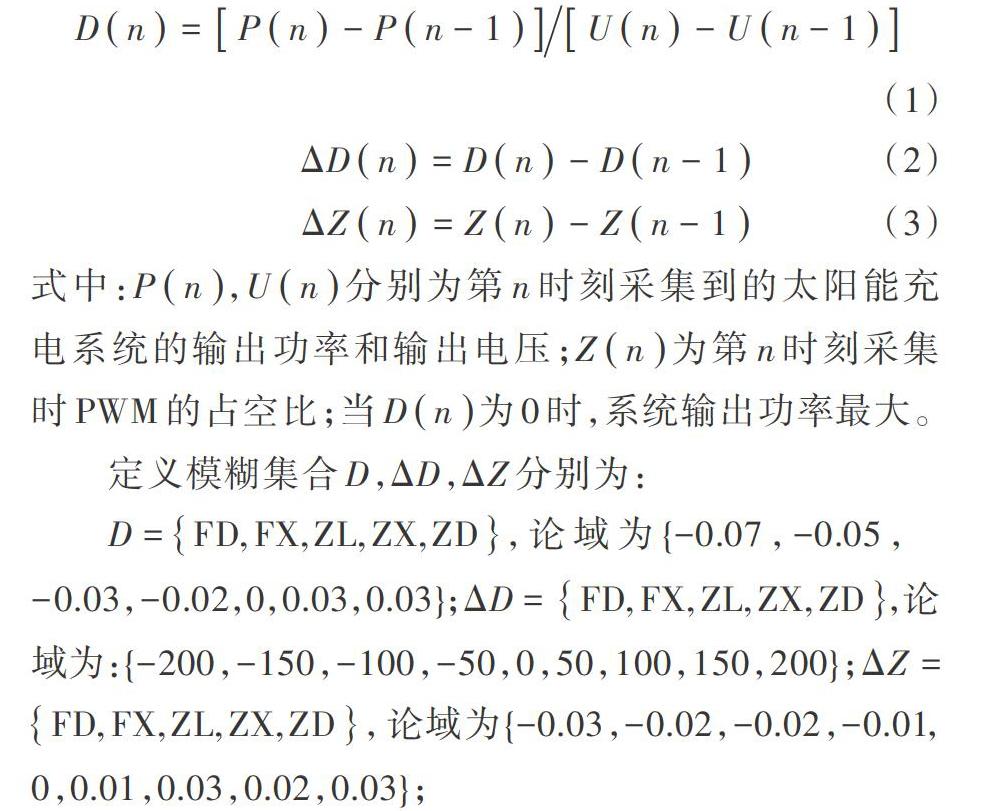
实现模糊控制主要有3个步骤,分别为模糊化、确定模糊规则和模糊判决。模糊化是指将精确的输入量转化为模糊量。在太阳能发电系统中,当dP/dU=0时,所对应的工作点即为最大功率点。通过对太阳能发电系统的输出电压和功率进行实时采样,并用n和n一1来表示当刻和前一刻的采样数据。采用误差D(n)和误差变化量AD(n)作为模糊逻辑控制器的输入,以PWM占空比Z的变化量AZ(n)为输出。定义:
D(n)=[P(n)一P(n-1)]/[U(n) -U(n一1)]
(1)
△D(n) =D(n) -D(n-l)
(2)
△Z(n) =Z(n)-Z(n一1)
(3)式中:P(n),U(n)分別为第n时刻采集到的太阳能充电系统的输出功率和输出电压;Z(n)为第n时刻采集时PWM的占空比;当D(n)为0时,系统输出功率最大。
定义模糊集合D,AD,AZ分别为:
D={FD,FX,ZL,ZX,ZD},论域为{-0.07,-0.05,-0.03,-0.02.0. 0.03, 0.03}; AD={FD, FX, ZL, ZX, ZD},论域为:{-200,-150,-100,-50,0,50,100,150,200};AZ={ FD,FX,ZL,ZX,ZD}.论域为{-0.03,-0.02,-0.02,-0.01,0, 0.01. 0.03, 0.02, 0.031;
其中,FD,FX,ZL,ZX,ZD分别表示负大、负小、正零、正小、正大。
确定模糊规则即确定系统最佳工作点的规则。从前文可知,当D恒为0时系统处于最佳工作点,模糊判决则是将模糊集转化为精确值的过程。
本文在Matlab/Simulink环境下创建了一个自主电力系统模型。为了评估MPPT算法与基于模糊逻辑的MPPT算法的有效性,除了控制器本身,本文还设计了光伏系统,包括太阳能电池、充电控制器、蓄电池和负载,如图2所示[9-10]。
在控制器单元中实现了扰动观测MPPT算法,模型如图3所示。MPPT控制器的使用增加了太阳能电池的能量生产,并提高了电池充电率。图4显示了电池充电率(无负载)的对比图。
从图4中可以看出,使用MPPT控制器的电池充电率显著,能量产生量提高了约23%。图5为所开发模型的最大功率点跟踪模式。
图5表明,在算法实现过程中电压和功率有所波动,导致太阳能电池产生的能量利用不足,而利用基于模糊逻辑的自适应算法可以解决这一问题。图6显示了带模糊调节器的MPPT控制器的模型。
模糊控制器的输入语言变量,本文使用太阳能发电系统MPPT算法比例因子E与其步进大小dE来描述系统的变化情况:
模糊逻辑单元的输出变量,由步进大小和MPPT算法比例因子的变化情况综合控制。输出变量值对输入变量依赖性的规则集定义,如表1所示。
3 模糊逻辑单元对MPPT控制器的影响
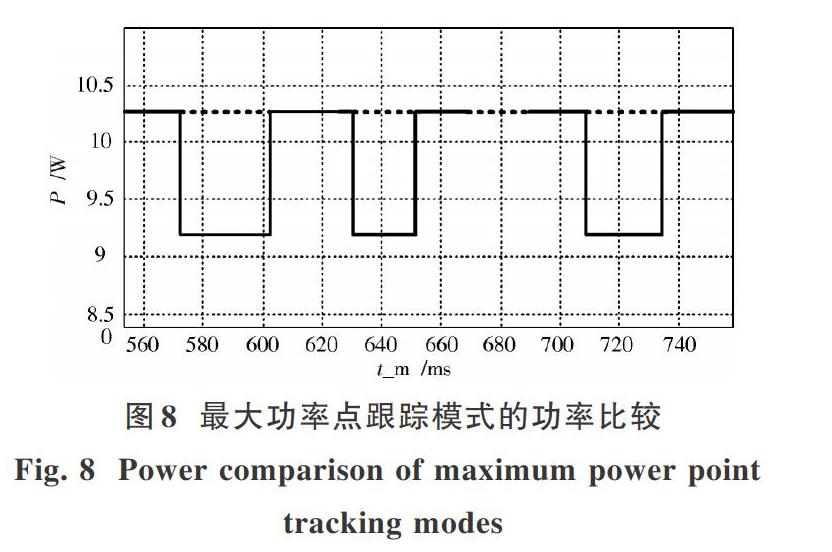
为了研究模糊逻辑单元对太阳能光伏发电的影响,设置模型的初始参数:温度25℃,太阳曝晒水平W=1 000 kW.h.m-2,入射角a=900,用户负载关闭。图7和图8为仿真结果。
图7中粗线为正常MPPT算法,细线为基于模糊逻辑的算法。图8中实线为正常MPPT算法,虚线为基于模糊逻辑的算法。图7表明,在MPPT控制器中使用模糊逻辑单元可大幅提高最大功率点跟踪的速度,并降低电压波动,从而抵消了功率波动,使功率产生不足的程度降低约2%。
4 结论
本文改进了智能设备的太阳能供电系统设计,采用基于模糊逻辑的自适应算法,将MPPT电荷控制器应用于实际系统,提高了系统性能。通过仿真建模,研究了带自适应的扰动观测MPPT算法的有效性。证明了模型的正确性,验证模糊控制器的作用。开发的模糊控制系统提高了最大功率点跟踪速度,抑制了功率波动。仿真测试结果表明,MPPT技术的应用使能量产生量提高约23%。在MPPT控制器中引入了基于模糊逻辑的算法,提升了最大功率点跟踪的速度,并抵消了电压波动,使功率产生不足的程度降低了2%。
参考文献
[1]SHEN K, PROLETARSKY A V. NEUSYPIN K A.Algorithmsof constructing models for compensating navigation systems ofunmanned aerial vehicles[C]//International Conference on Ro-botics&Automation Engineering. Jeju: IEEE. 2016: 104 - 108.
[2] SHEN C,YU S,LU J,et al.A systematic methodology forconstructing hyperchaotic systems with multiple positive lyapu-nov exponents and circuit implementationJ]. IEEE transac-tions on circuits&systems, 2017, 61(3):854-864.
[3]刘艳莉,周航,程泽.基于粒子群优化的光伏系统MPPT控制方法[J].计算机T程,2010,36( 15):265-267.
LIU Yanli. ZHOU Hang, CHENG Ze. MPPT control methodof PV system based on PSO [J]. Computer engineering, 2010,36(15):265-267.
[4]胡文淵.光伏发电系统MPPT控制算法的优化研究[D].北京:中国地质大学,2016.
HU Wenvuan. Study on optimization of MPPT control algorithm for photovoltaic power generation system[Dl. Beijing: ChinaUniversitv of Geosciences. 2016.
[5] ZHOU S.Random exponential attractor for cocycle and applica-tion to non-autonomous stochastic lattice svstems with multipli-cative white noise [J]. Journal of differential equations, 2017,263(4):2247-2279.
[6]陈艳,周林,刘强,等.基于遗传编码的光伏MPPT模式搜索跟踪控制[J].沈阳工业大学学报,2011.33(3):331-337.
CHEN Yan, ZHOU Lin, LIU Qiang, et al.MPPT patternsearch tracking control of photovoltaic system based on geneticencoding [J]. Journal of Shenyang University of Technology,2011, 33(3):331-337.
[7]吕晨旭.基于神经网络的光伏系统MPPT控制算法设计[J]现代电子技术,2018 ,41(3):132-135.
LU Chenxu. Design of neural network based MPPT control algo-rithm for photovoltaic system [J1. Modern electronics tech-nique, 2018, 41(3): 132-135.
[8] 11 X, QIU H, CHEN Z,et al.A local Kriging approximationmethod using MPPT for reliability - based design optimization[J1. Computers&structures. 2016. 162: 102-115.
[9] BRAKENSIEK J,GURUSWAMI V, ZBARSKY S. Efficient low-redundancv codes for correcting multiple deletions[J1.IEEEtransactions on information theorY, 2018. 64(5): 3403-3410.
[10] YANG X, LI X.Finite-time stahilitv of linear non-autonomoussvstems with time-varying delays rJ]. Advances in differenceequations, 2018(1):101-107.
作者简介:李红斌(1966-),男,山西长治人,硕士,副教授,研究方向为机电控制及自动化。
猜你喜欢
科技资讯(2016年34期)2017-04-21
中国绿色画报(2016年12期)2017-03-28
山东工业技术(2016年24期)2017-01-12
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年12期)2016-05-25
科技视界(2016年3期)2016-02-26
科技与创新(2016年2期)2016-01-19
科技与创新(2015年13期)2015-07-03
企业导报(2015年8期)2015-05-29
电子技术与软件工程(2016年22期)2007-12-26
