
城市园林景观交错带空间格局三维重建系统设计
2019-04-28 12:24丁志军
现代电子技术 2019年24期

摘要:三维重建系统可重现城市园林景观交错带空间格局,为城市生态环境规划、城市空间布局提供有效的设计方式。城市园林景观交错带空间格局三维重建系统基于双目立体视觉原理采集园林景观格局的二维图像,根据两幅二维图像特征点得到对象的三维坐标点,构建三维点云模型;基于视口转换矩阵和屏幕坐标转换值世界坐标系中,采用三角网生长算法构建城市园林景观交错带空间格局Delaunay三角网格模型,经外观渲染与纹理映射后,完成城市园林景观交错带格局三维重建。系统测试表明,重建的三维城市园林景观交错带空间格局布局合理、外观逼真,体现了景观交错带的主要特征。
关键词:三维重建;城市园林景观;交错带;空间格局;生长算法;系统测试
中图分类号:TN911.73-34:TU986
文献标识码:A
文章编号:1004-373X( 2019) 24-0154-04
城市园林景观交错带空间格局是园林景观设计的主要部分,是园林景观脉络、空间布局的主要体现“,。城市发展过程中需要不断规划城市园林景观布局、优化园林景观交错带分布,以调节城市生态环境、节约城市规划空间[2]。计算机技术高速发展,城市园林景观交错带空间格局三维重建技术能够高度还原城市园林布局[3],将庞大规模的空间格局缩小在图形软件中,为逆向工程设计提供快速、有效的表达方式[4]。本文设计城市园林景观交错带空间格局三维重建系统,目标是重现准确、逼真、可视化的城市园林景观交错带空间格局,为再现城市园林景观交错带、优化城市园林景观合理布局提供有效方式。
1 三维重建系统设计
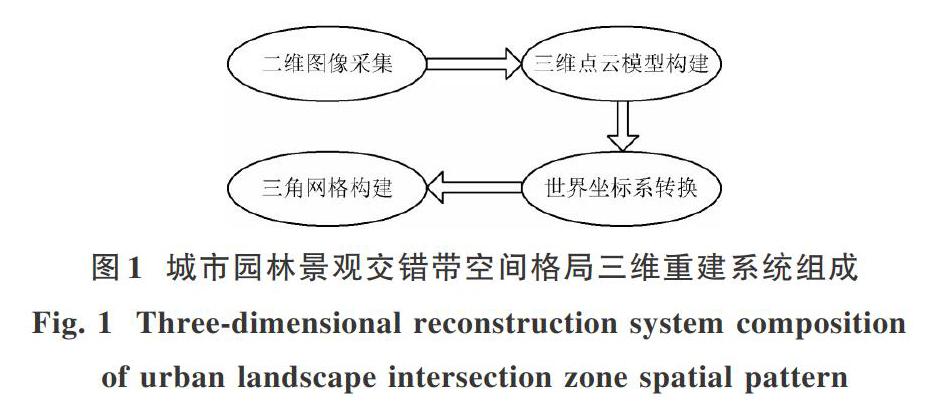
城市园林景观交错带空间格局三维重建总体思路如下:
1)基于双目立体视觉原理获取园林空间格局三维坐标,即采用相机拍摄得到同一场景、不同角度的两幅图像[5],基于两幅二维图像得到物体各点三维坐标,利用各点构建的三维模型是点的集合,即点云[6];
2)恢复三维点云屏幕坐标至世界坐标系中;
3)利用离散的点云数据构建三角网格模型[7],实现城市园林景观交错带空间格局三维重建。系统组成如图1所示。
1.1 三维点云模型构建
摄像机基于双目立体视觉原理获取园林交错带空间格局的三维坐标,无干扰情况下双目立体视觉原理如图2所示。
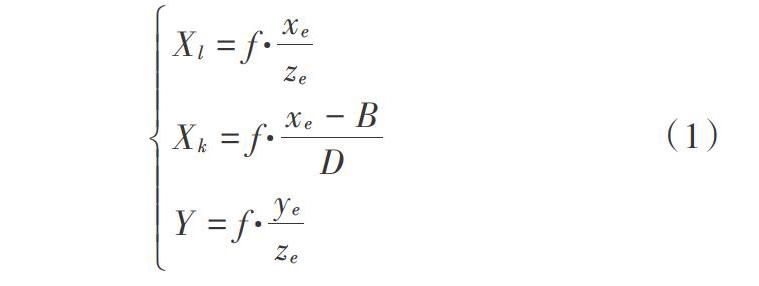
基于双目立体视觉原理,两个摄像机内外参数相同情况下,任意摄像机像平面中存在与另一台摄像机对应的特征匹配点时,基于式(1)可得到此点三维坐标[7]。
物体表面海量三维坐标点9成为点云,点云组成物体三维点云模型,基于三维点云模型构建三角网格模型完成园林三维重建,在此之前应将三维点云屏幕坐标转换至世界坐标中。
1.2 三维模型屏幕坐标向世界坐标的转换
屏幕坐标点向世界坐标系的转换基于视口转换矩阵实现,视口转换矩阵为:
1.3 Delaunay三角网格构建
三维模型坐标转换至世界坐标系后,开始构建三维网格模型,完成城市園林景观交错带空间格局三维重建。收缩生长算法、扩张生长算法是三角网格生长算法的两个方向[9],系统采用三角网生长算法中的扩张生长算法构建城市园林景观交错带空间格局模型三维网格。算法构建三维网格思路如下:连接点集中距离最小的两点形成一条边,基于Delaunay构网原则获取第三个点,三点连接得到三角形[10];沿着基线扩展连接距离较近的点(初始三角形的三边为基线)得到多个三角形,全部离散点涵盖在三角网中后,完成三角网格构建。
基于上述过程实现城市园林景观交错带空间格局三维重建,为提升模型美观效果,最后对三角网格模型展开纹理映射,渲染模型外观,得到逼真、可视化的城市园林景观交错带空间格局三维模型。
2 系统测试
以某城市局部园林景观交错带为实例展开仿真系统测试,评估本文的城市园林景观交错带空间格局三维重建系统性能与效果。该园林景观占地约1.12公顷,其中景观交错带占地约0.89公顷,景观交错带在园林景观格局中的平面布局如图3所示。该园林景观包含现代园林、中国古典园林、乡村庭院式园林以及自然风景园林四种园林风格。
2.1 系统三维重建结果展示
本文系统以城市园林景观为实例构建交错带空间格局模型,构建的地形Delaunay三角网格模型如图4所示。
图4中,全部点均包含在三角网格中,说明构建De-launav三角网格模型效果较好,不存在遗漏坐标点的情况,可准确还原地形起伏程度。
本文系统重建的现代风格的园林景观交错带三维效果图如图5所示。
本文构建的三维景观交错带空间格局模型布局合理、外观逼真,体现了景观交错带的主要特征,用户观看三维重构模型即可整体把握城市园林景观空间格局的风格、布局等情况。
2.2 系统平均重建误差分析
通过定量的方式评估本文系统重建城市园林景观交错带空间格局的效果,采用平均重建误差评估本文系统三维重建结果,平均重建误差计算方法为:
基于平均重建误差分析本文系统重建三维模型的效果,选取4条不同类型的景观空间交错带作为三维重建对象,每个交错带取8个重建视角,基于式(4)计算本文系统重建城市园林景观交错带空间格局的平均重建误差,结果如表1所示。
表1中,本文系统重建城市园林景观交错带空间格局的误差有所不同,重建现代园林交错带格局、自然风景园林交错带格局的平均误差在0.012 - 0.013之间,重建中国古典园林、乡村庭院式园林交错带空间格局的误差区间分别为0.010 - 0.012,0.015 - 0.016。由于不同类型的园林景观构造不同,导致本文系统重建景观交错带空间格局误差存在差异,但是总体误差均低于0.1,符合精准重建标准,因此,本文系统是一种可靠的城市园林景观交错带空间格局三维重构系统。
3 结论
本文系统重建城市园林景观交错带空间格局的效果逼真、布局合理,体现了景观交错带的主要特征。文中首先采集园林空间格局的二维图像后得到物体各点的三维坐标,构建三维点云模型;将屏幕坐标转换至世界坐标系后,利用离散的点云数据构建三角网格模型完成城市园林景观交错带空间格局三维重建。三维重建过程中,提取两幅二维图像的特征点十分关键,决定构建的三维模型是否精准,因此,可从精准提取二维图像特征点角度提升三维重建系统的建模准确度。
参考文献
[1]谢启姣,段吕晗,汪正祥,夏季城市景观格局对热场空间分布的影响:以武汉为例[J].长江流域资源与环境,2018,27(8):84-93.
XIE Qijiao. DUAN Luhan. WANG Zhengxiang. Impact of ur-ban landscape pattern on spatial distribution of thermal field insummer: a case study of Wuhan [J]. Chinese journal of me-chanical engineering, 2018, 27(8):84-93.
[2]邓羽.城市空间扩展的白组织特征与规划管控效应评估:以北京市为例[J].地理研究,2016,35(2):353-362.
DENG Yu. Self-organization characteristics of urban extensionand the planning effect evaluation:a case study of Beijing [J].Geographical research, 2016. 35(2): 353-362.
[3]成实,成玉宁.从园林城市到公园城市设计:城市生态与形态辨证[J].中国园林,2018,34( 12):47-51.
CHENG Shi. CHENG Yuning. Form garden city to park citydesign: the dialectic relationship between urban ecology andmorphology [J]. Chinese landscape architecture. 2018. 34( 12):47-51.
[4]马东岭,王晓坤,李广云,利用图割算法进行城市密集点云表面模型重建[J]测绘通报,2019(2):45-48.
MA Dongling, WANG Xiaokun. LI Guangyun. Reconstructionof urban dense point cloud surface model using graph-cuts algo-rithm [J]. Bulletin of surveying and mapping, 2019(2):45-48.
[5]李莹,林宗坚,苏国中.多视影像的城市实景三维生产关键技术[J]遥感信息,2017. 32(1):35-39.
LI Ying, LIN Zongjian. SU Guozhong. Key technology of pro-duction of city real 3D images [J]. Remote sensing information,2017. 32(1):35-39.
[6]李肖,葛宝臻,罗其俊,等.自由双目立体视觉摄像机动态外参数的获取[J].计算机应用,2017,37(10):2888-2894.
LI Xiao. GE Baozhen, LUO Qijun,et al.Acquisition of cam-era dynamic extrinsic parameters in free binocular stereo visionsystem [J]. Journal of computer applications, 2017, 37 (10):2888-2894.
[7]王泽吴,黄常标,林忠威,三角网格模型的最小值边界分割[J].计算机辅助设计与图形学学报,2017,29(1):71.
WANG Zehao. HUANG Changbiao. LIN Zhongwei. Trianglemesh shape segmentation based on detection of minima ruleboundaries [J]. Journal of computer-aided design&computergraphics, 2017. 29(1): 71.
[8]熊风光,蔡晋茹,况立群,等.三维点云模型中特征点描述子及其匹配算法研究[J]小型微型计算机系统,2017. 38(3):640- 644.
XIONG Fengguang, CAI Jinru. KUANG Liqun, et al.Studyon descriptor and matching algorithm of feature point in 3Dpoint cloud [J]. Journal of Chinese computer systems. 2017, 38(3):640-644.
[9]丁莹,范静涛,宋天喻.双目立体视觉检测系统正向最优化设计方法研究[J]仪器仪表学报,2016.37(3):650-657.
DING Ying, FAN Jingtao, SONG Tianyu. Optimal forward de-sign method for the binocular stereo vision inspection system[J]. Chinese journal of scientific instrument, 2016. 37(3): 650- 657.
[10]楊景豪,刘巍,刘阳,等.双目立体视觉测量系统的标定[J]光学精密工程.2016.24(2):300-308.
YANG Jinghao, LIU Wei, LIU Yang. et al.Calibration ofhinocular vision measurement system [J]. Optics and precisionengineering, 2016, 24(2): 300-308.
作者简介:丁志军(1972-),男,山东潍坊人,硕士,高级工程师,研究方向为电子规划设计。
猜你喜欢
软件(2020年3期)2020-04-20
珠江水运(2017年17期)2017-10-10
南水北调与水利科技(2016年6期)2017-01-06
光学精密工程(2016年6期)2016-11-07
现代经济信息(2016年22期)2016-10-26
腹腔镜外科杂志(2016年12期)2016-06-01
现代经济信息(2016年6期)2016-05-31
现代经济信息(2016年1期)2016-01-25
中国医疗美容(2015年1期)2015-07-12
中央民族大学学报(自然科学版)(2015年4期)2015-06-11
