工业机器人在冲压应用中的效率优化
2019-04-26 02:39刘永安
中国设备工程 2019年6期
刘永安
(广州数控设备有限公司,广东 广州 510530)
在冲压领域,目前我国仍然是高密集的人力劳动,自动化程度低,工作环境恶劣。由于在冲压生产中,高噪音的工作环境、高度重复单调的工序以及高节拍要求三个因素,易使工作人员疲劳进而经常导致工伤事故发生。推进工业机器人在冲压生产的应用,不仅把劳动人员从危险恶劣、单调重复地工作环境中解放出来,同时大大提高冲压产品的产量、稳定性及一致性,进一步提高工业自动化水平的重要一环。目前,在冲压应用中对于大负载、拉深等应用,对节拍要求不高的场合已大范围应用工业机器人实现机器换人。为了进一步攻克冲压作业中节拍效率要求高的问题,更全面地把人从危险低附加值的工作中解放出来,从各环节提高工业机器人的作业效率,显得异常重要。。
1 冲压应用中工业机器人的种类选择对作业效率的影响
在整条冲压自动化线中,冲压各环节所使用的工业机器人,应该有针对性地做出选择,因为这将直接影响冲压作业的效率,下面就几种典型结构的工业机器人在冲压上的应用作简单的介绍。并联机器人比较适合高精度、高刚度以及大的载荷同时要求的工作空间并不大的场合。在冲压上应用,可以使用在物料的分拣等来料上料环节。冲压中一般有多工序组成,不同工序间压力机紧密配合。在移载环节,可选择的工业机器人包括6 轴关节式搬运机器人,4 轴关节式搬运机器人以及摆臂机械人。假如对自由度要求高,例如工序中有对工件作翻转再进行作业的要求,或者当工件因为翻转,相对地面需要倾斜,应选择6 轴关节式搬运机器人;而对刚性要求低、冲压工件部署单调重复、不经常更换工件的小件冲压应用,可以选择低成本的摆臂机器人;目前在移载工序中,由于兼具高刚性、高速度以及关节又不失灵活的特点,应用最多的是4 轴关节式搬运机器人。在冲压自动线的末端,下料堆垛等可选择使用码垛机器人,效率高,成本又比多自由度的机器人较低。
下面就冲压应用中使用最广的4 轴关节式机器人作较细化的介绍。机构上,4 轴关节式机器人有与码垛机器人相通之处,有两副平行四杆机构,用以保证机器人末端与地面水平,节省传统机器人的两个轴联动才实现末端水平。这种机器人在设计之初,就为了大概率适应冲压应用,故其1 轴旋转速度与4 轴旋转速度很高;同时,由于关节采用了RV 结构减速机,保证了高刚性及易于装配。在冲压自动化生产线的各环节,选择正确合适的工业机器人种类,将大大节省成本,提高冲压作业效率。
2 冲压应用中工业机器人的方案布局对作业效率的影响
影响冲压作业的效率的又一大因素,是工业机器人的方案布局。图1 为典型的工业机器人冲压应用方案布局示意图,方案中机器人作业区域有安全围栏,使用多台工业机器人协作完成冲压自动化。在选择正确的工业机器人种类后,接下来重要的就是如何布置工业机器人之间的相对位置。应按以下原则来安排。
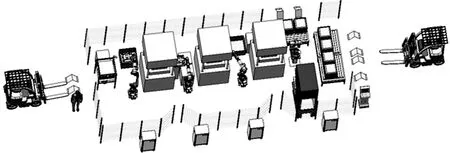
图1 典型工业机器人冲压应用布局方案
首先,在安装固定机器人到地面时,设置机器人与地面的高度,应结合工业机器人的工作范围、臂展等考虑,在满足工况的前提下,让机器人在“舒服”的位置工作,减少不必要的考验机器人串联结构刚性的机会,这也将大大地节能及增长机器人的使用寿命。其次,整个冲压方案中,尽可能在各环节中,让单台工业机器人应付多台压力机或多个工序操作。这样的好处是,可以提高工业机器人的在线使用率,同时减少了不必要的机器人等待时间。然后,在多台工业机器人协作的方案中,应充分考虑合理布置机器人与机器人之间的间隙,或者机器人与压力机之间的距离,以免增加机器人多余的避让动作轨迹,以提高冲压作业效率。最后,工业机器人的方案布局,针对压力机要常更换模具的应用场合,应留够更换操作空间或设置相应的机器人移动机构,减少更换模具时间以提高作业效率。
3 冲压应用中工业机器人的工装夹具对作业效率的影响
和人类的手操作不同的是,联系工业机器人与工件的桥梁,就是工装夹具。在上料、移载、下料等环节,合理设计工装夹具,将大大提高工业机器人的作业效率。没有与工业机器人直连的有上料料盘、分拣输运、工件翻转、工件检测等工装。安装在机器人末端的是夹具,在常用的冲压应用中,有吸盘类夹具以及抓手类夹具。由于两者使用大量气动元器件如真空发生器、气缸等,工厂应保证气源供应的稳定。同时,应根据工件及工序的特点设计合适的工装,以避免发生低效率的机器人取放工件,导致节拍时间变长。再者,实现同样功能的工装夹具,应优化其机构的设计,用优化的机械结构来达到减少执行器气缸个数,或气缸动作的次数,这将节省时间和能源,提高冲压的作业效率。对于不同工序间,有工件翻转要求的场合,应仿真衡量设置单独的翻转工装,还是直接选用多轴机器人直接实现翻转。以较经济的方式做设计,并以提高效率为目标。
4 冲压应用中工业机器人的电气控制对作业效率的影响
工业机器人的控制系统在整个冲压应用中尤为重要,它主导着工业机器人的任务分配和程序执行,同时接收各环节各种传感器反馈信号。关于电气控制中需注意的事项有以下几点。第一,选择兼容的通讯方式,根据各类信号,设计以安全为前提的动作逻辑,尽量让机器人不作多余的等待,可以显著提高效率节拍。第二,根据工业机器人的工位以及取放点,应设计优化的工业机器人动作轨迹路线,避免多余的避障点或路线增加机器人的动作时间。第三,应尽量选用有内置PLC 功能的工业机器人供应商,内置PLC 功能将允许机器人多线程同步处理各类信号,无需增加与外置PLC 通讯的时间,大大提高程序执行效率。第四,应选用有友好人机界面的工业机器人供应商,由于冲压工人需经过培训才能顺利使用工业机器人进行示教应用,所以越简洁易操作的人机界面,设计出来的程序越能反映出冲压工人优化的工艺思想。第五,整个方案应设置安全栅栏及应急预案,以便在发生工业机器人故障时,维修人员操作的时间不影响正常的冲压生产。
5 结语
本文从工业机器人种类选择、方案布局、工装夹具以及电气控制多方面,阐述了冲压应用中,影响工业机器人效率及节拍的多种原因,并提出了众多可操作或参考的技术细节。随着工业机器人在冲压领域的应用不断深入,将大大缓解冲压生产中工伤的问题,加速工业自动化的进程。
猜你喜欢
汽车工艺师(2021年7期)2021-07-30
哈尔滨轴承(2021年1期)2021-07-21
哈尔滨轴承(2021年4期)2021-03-08
哈尔滨轴承(2020年3期)2021-01-26
家庭影院技术(2020年4期)2020-05-21
模具制造(2019年10期)2020-01-06
模具制造(2019年4期)2019-06-24
模具制造(2019年3期)2019-06-06
北京航空航天大学学报(2017年2期)2017-11-24
环球市场信息导报(2015年35期)2015-12-26