
同步磁阻电动机改进高频注入位置估算算法研究
2019-04-25 03:07杜逸康
微特电机 2019年4期
杜逸康,廖 勇,李 福,林 豪
(重庆大学,重庆 400044)
0 引 言
同步磁阻电动机是一种转子无需永磁体和励磁绕组的无刷电机,它依靠转子的凸极性,产生磁阻转矩,结构简单,成本较低,调速性能好。对同步磁阻电动机采用矢量控制,需要获得较高精度的转子位置信号,传统控制系统通过安装位置传感器实现这一需求。而高精度位置传感器本身价格昂贵,稳定性差,并且需要额外的空间,在对成本控制要求高,对机械结构空间限制多的场合难以应用。为了解决这一难题,诸多学者针对同步磁阻电动机的无位置传感器控制进行研究,提出多种位置检测方法。
由于同步磁阻电动机的凸极性,电机的状态变量如电压、电流和磁链中均含有转子位置信息,通过合理的解算方法可提取出转子的转速或位置信号。例如利用在两相静止α,β坐标系中,定子反电动势是含有转子位置角项的量,对观测到的反电动势直接解算可获得转子角度[1]。这类方法运算简单,但在低速段,漏抗压降和电阻压降占比较大,反电动势较小,参数误差影响较大;在零速时,反电动势为零,无法进行解算。磁链观测法通过静止两相坐标系下的定子磁链,与d,q两相旋转坐标系中的定子磁链进行对比,建立磁链观测器,即可求得转子角位置[2-7]。文献[2]采用考虑交叉饱和影响的电机模型,提高磁链观测精度,同时在低速时引入信号注入法,校正磁链观测结果。文献[3]在文献[4]、文献[2]的基础上引入全维观测器,减小电机参数变化对定子磁链观测带来的影响。文献[5]在电流微分检测方法的基础上,分析起动和低速阶段的算法和控制方法的调整,并降低对电机参数准确性的要求。文献[6]重点考察各类损耗对磁链观测所带来的影响,并建立基于最大效率的控制模型。文献[7]基于文献[5],引入利用q轴电流的速度观测器和鲁棒控制器,优化控制效果。磁链观测器优点在于对负载变化和转速变化不敏感,但与反电动势解算法相似,对电机参数变化敏感;在零转速点无法运行,同时在低速段由于积分器零漂问题,计算得到的磁链具有积分效应,造成较大误差。
为解决零速点及低速段的位置观测问题,文献[8]基于文献[9],提出电流微分检测法,其基本思路是利用逆变器若干开关周期内的三相电感瞬时值计算转子角位置。该方法计算简单,无需电机参数,且每个开关状态可更新转子角位置,算法分辨率高,有利于实现高精度控制。但电流微分检测法需要测量开关过程中的电流纹波值,对电流传感器和电流测量环节的测量精度和采样速度都要求极高,且控制系统必须采用电流滞环控制,转矩脉动相比SPWM和SVPWM控制更大,当转速升高后该问题更为显著,因此该类方法的应用较为局限。
同样,为弥补磁链观测类方法在低速段及零速点的问题,利用电机的凸极性,采用高频注入法,可得到转子位置信息[10]。文献[11]提出在低速段使用高频电流注入法,在d轴方向上注入一个电流小信号,利用定子端反馈的高频电压信号跟踪转子位置角。文献[12]采用高频旋转电压注入,可在定子电流信号中检测二倍频的高频分量,注入信号与检测信号的相位差即为实际电角度。对比不同方法产生的估计误差,脉振信号注入法要优于旋转信号注入法,而在鲁棒性和瞬态响应速度上,旋转信号注入法要优于脉振信号注入法,总体来看,脉振注入法更优[13]。在脉振信号注入法的研究中,电压脉振信号相比电流脉振信号,在同样的注入频率和功率下,可以产生更大的参考轴系误差角以便于追踪转子位置,并产生更小的转矩和转速脉动[14]。
高频注入法目前已成为多类位置估算算法在低速段的主要方法。但现有的脉振电压注入法的反馈信号处理中,需要系统生成与反馈信号频率相同、相位相同的正弦信号,并将该信号与反馈电流信号相乘,才能将所需的误差量信号转为直流量,进而通过滤波处理得到输入PI环节的误差信号。当系统生成的正弦信号与反馈信号相位不同时,乘法计算后得到的结果中,有效信号占比会减小,最差的情况下,计算结果中包含真实误差信息的信号量大小为零,无法通过PI环节实现有效的位置跟踪。
基于上述现有的理论研究,本文研究一种采用脉振高频电压信号注入法的同步磁阻电动机低速段位置估算方法,其核心思路:在d轴上注入高频脉振电压信号后,在反馈电流d轴分量中也存在相同频率且包含参考坐标系与真实坐标系相对误差的信号,且该信号与q轴高频反馈信号经过相同的采样和A/D转换环节,相位滞后相同。因此在文献[15]的基础上,在反馈信号处理过程中,将d轴的电流信号与q轴电流信号相乘,从d,q轴电流信号的乘积中直接提取误差信号。不利用系统产生的高频参考信号,从而避免原方法解算过程中系统产生的高频参考信号需要进行相移补偿的缺点。
1 同步磁阻电动机数学模型
1.1 同步磁阻电动机基波模型
忽略同步磁阻电动机的铁心损耗、饱和及交叉耦合效应,在d,q同步旋转坐标轴系中,理想同步磁阻电动机的电压方程如下:
(1)
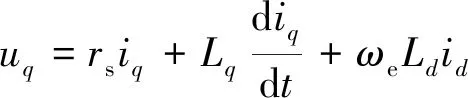
式中:ud,uq为定子电压d,q轴分量;id,iq为定子电流d,q轴分量;rs为定子电阻;Ld,Lq为d,q轴电感;ωe为转子电角速度。同步磁阻电动机的转矩表达式:
(3)
式中:p为电机转子极对数。
1.2 高频激励信号下的电机模型
对高频注入信号激励下的电机模型而言,由于注入的电压信号幅值较小,反馈电流较小,故电阻压降项相较电感压降项可忽略不计;在低转速至零转速段,运动电势项由于转速较低也可忽略。因此,式(1),式(2)简化为频域表达式后,将复频域算子s用jωh替换,得到[16]:
(4)
式中:各符号的上标f表明此式中的变量为在高频注入下的d,q轴定子电压、电流;lq,ld为d,q轴高频电感;ωh为对应高频的电角速度。
2 高频脉振电压信号注入法及其改进
2.1 传统高频注入法及存在的问题
在低转速区间,向电机d轴的电压分量注入高频小幅值的脉振电压信号,从电机机端可检测到反馈的高频电流信号。当控制所用坐标轴系和同一时刻真实的旋转轴系有偏移,如图1所示,可得参考坐标轴系与真实坐标轴系下的变量转换关系:
(5)


图1 参考坐标系与真实坐标系对应关系
在参考坐标轴系上注入如下的高频电压脉振信号:
(6)
式中:A为注入信号的幅值,通常在5~10 V之间。利用式(5),可以得到在真实坐标轴系下的注入信号:
由于参考坐标系和真实坐标轴系的电流间也具有式(5)的变换关系,我们将式(7)代入式(4)的高频同步磁阻电动机模型中,可以得到参考坐标系下的高频电流反馈:
(8)

其中:
(10)


图2 iq高频信号处理环节图
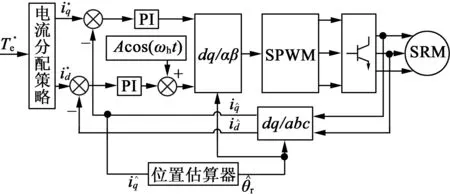
图3 同步磁阻电动机无位置传感器控制框图
在基本的高频脉振注入法中,对q轴电流高频信号的解析过程较为复杂。提升带通滤波器(以下简称BPF)的滤波效果,需要更高的阶数,这会增大算法的运算量。对上述问题,文献[15]将反馈的q轴电流直接与高频信号相乘,相当于对q轴电流信号在频域上做整体位移,将对应频率点高频信号转为直流信号,将基波信号转为高频信号,处理过程如图4所示。相比采用BPF的原方法,本方法减少运算量,提高了观测系统可靠性。
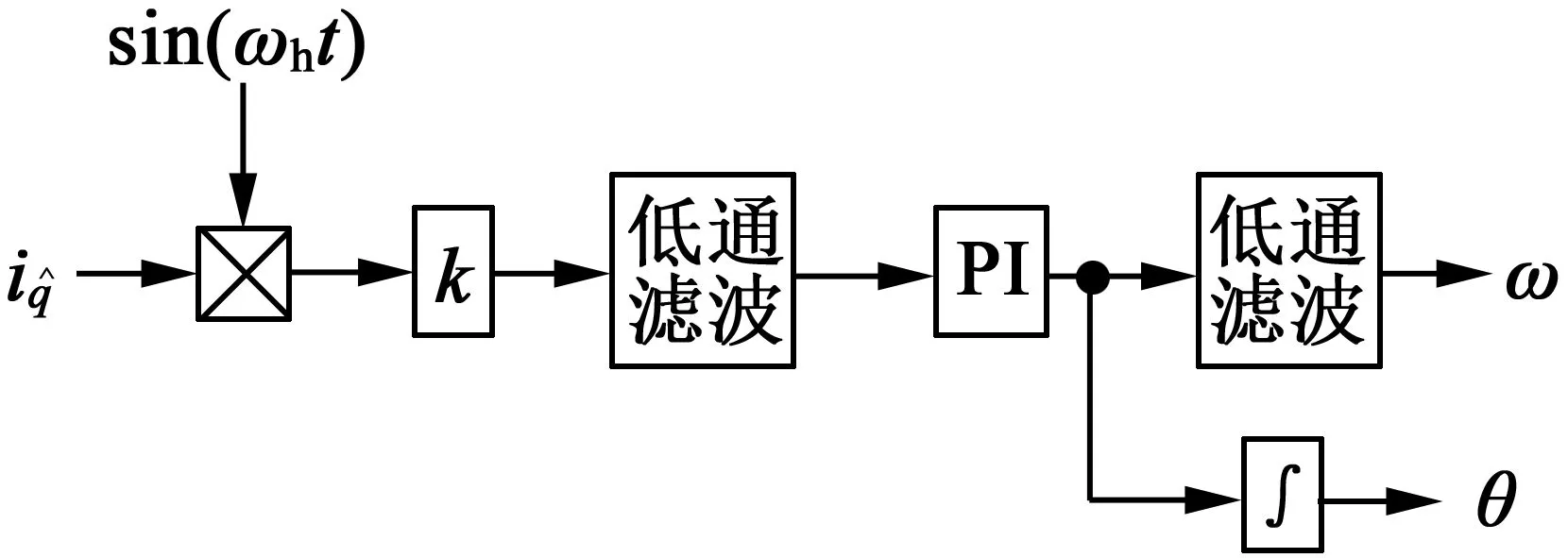
图4 文献[15]改进后的iq处理环节
而在系统运行过程中,为得到q轴电流值,需要通过传感器获取电流信息,并经过A/D信号的采样电路,输入控制系统,控制系统按照固定的频率计算并输出控制值,这些环节均会引入一定的相位滞后。因此,为能正确取样q轴目标频率的信号,我们需要对第一步处理中的高频信号相位做相应补偿,但上述滞后的具体值很难确定,在文献[15]、文献[17]中也未提到如何处理这一问题。
为更好地阐述该问题,可分析反馈信号与不同相位同频率高频信号相乘后的结果。假设q轴电流中的高频分量表达式:
(11)

理想状态下,ρ为零,处理后的结果:
(13)
相位滞后ρ的出现会造成直流分量相对于整体高频信号的成分减小,这对信号的提取非常不利。为了弥补直流分量减小而设置过大的增益系数k又可能会造成PI环节的振荡。
如果能够测得ρ值,或者通过理论推算得到,就能够抵消这一误差。推算ρ值需要考虑传感器、采样电路、滤波算法等多方面因素,较为复杂。而对目标高频信号直接跟踪相位差,需要BPF直接滤波得到对应频率点的信号,这与文献[15]中不使用BPF从而减小运算量的目标相悖。
2.2 改进的高频信号注入法


图5 改进后的高频信号处理环节


(15)
其中:
(16)


3 实验验证
本文所述高频注入法已通过实验论证。实验平台为基于DSpace 1103的电机控制系统,实验电机为一台同步磁阻电动机,基本参数如表1所示。

表1 同步磁阻电动机参数表
电机转速在45 r/min时,空载状态下的观测实验波形如图6~图8所示。图6为本文改进的高频注入法观测得到的转子位置电角度,与光码传感器测得的转子实际位置电角度对比,图7为二者计算得到的误差值,图8为空载状态下的三相电流波形。
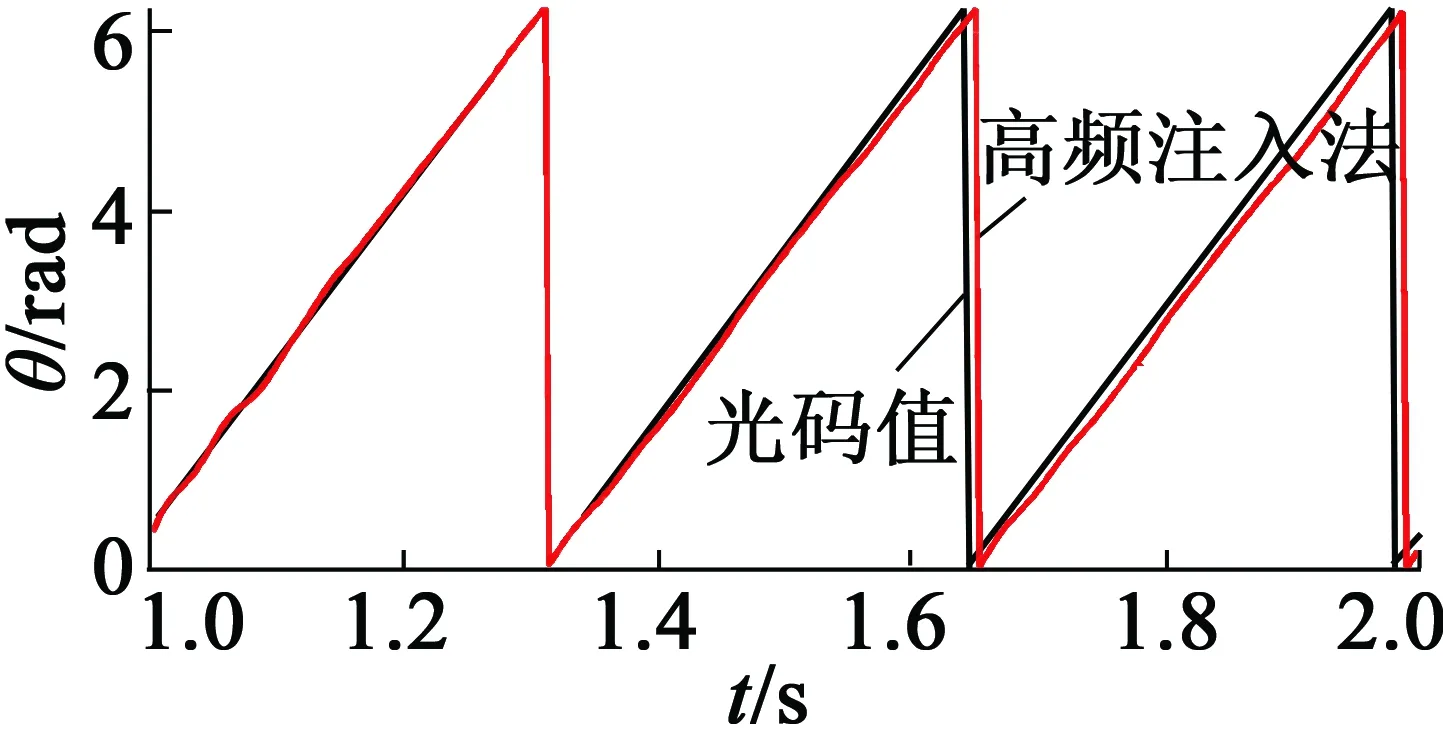
图6 高频注入法转子位置电角度观测值与传感器读取值
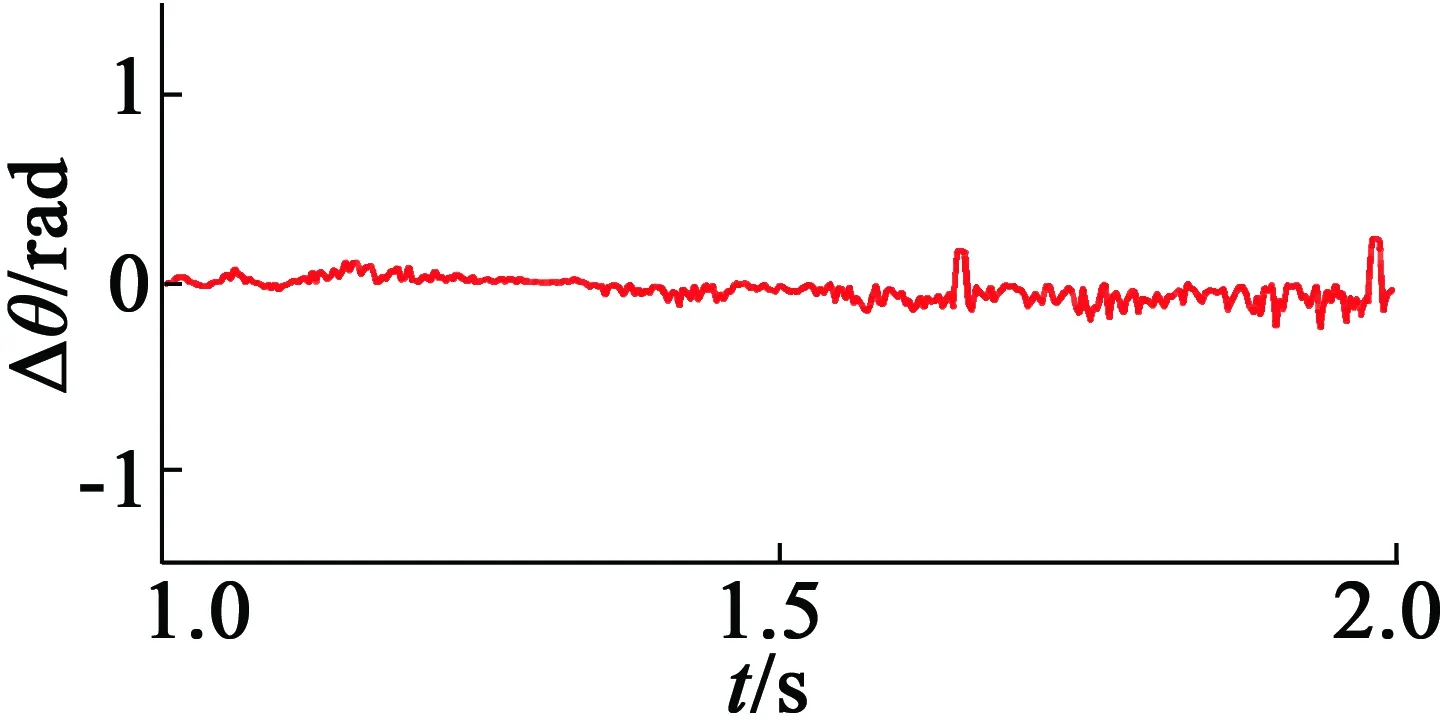
图7 高频注入法观测值误差

图8 三相电流波形(45 r/min,空载)
由图6可见,在低转速下,改进的信号注入法可以有效地跟踪转子位置角信息,并由图7可证,在未进行补偿的情况下拥有较少的相位滞后和较小的角度观测误差(0.1 rad约合5.7°),能够实现较好的跟踪效果。
图9、图10为45 r/min下,文献[15]的原始方法与本文改进后的方法在同一控制系统下的转子位置角估计值比较。
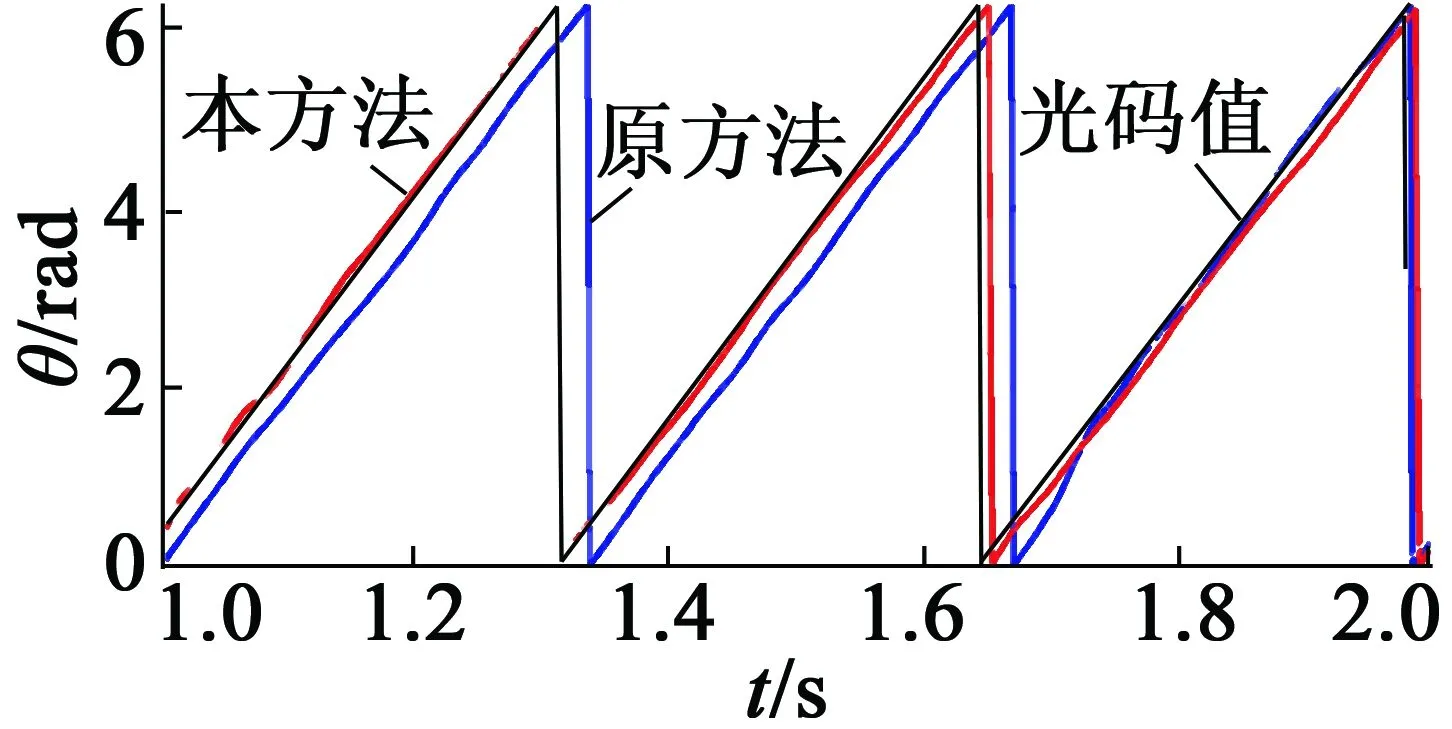
图9 改进方法与原方法对比
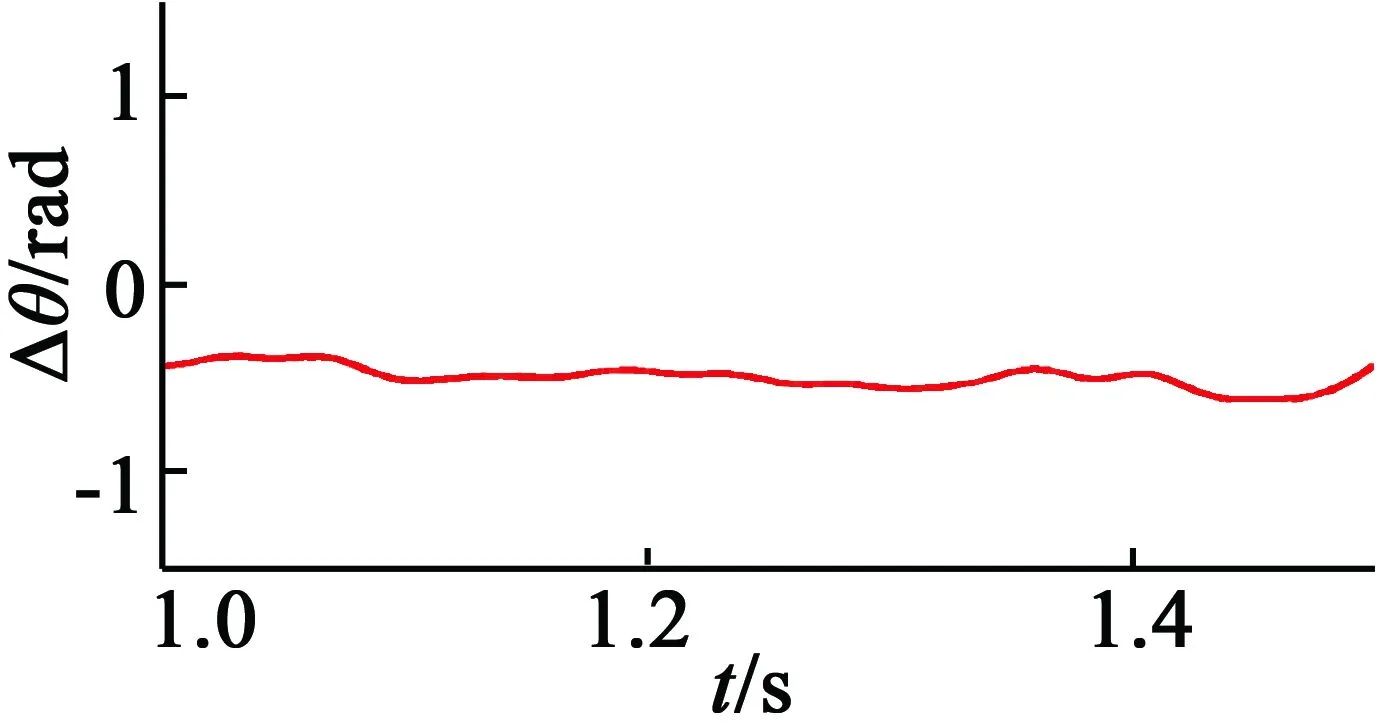
图10 原方法观测值误差
由图9可见,在改进方法已经稳定跟踪后,原方法在观测中具有更大的相差和振荡(1.7 s前后具有明显抖动),实际反映了在该注入信号下,原始方法已经不能准确地跟踪转子位置角。同时,图10也反映在实验中,原方法观测角度误差较大,跟真实位置角之间具有20°左右的角度观测误差。而对比图7,本文改进后的方法采用同样的信号注入频率和幅值大小(10 V,100 Hz),在两者均不进行观测角度补偿的条件下,仍然能够得到一个较稳定、且相位滞后更小的原始结果,这充分说明改进后的方法具有更好的系统稳定性和观测效果。
4 结 语
本文对同步磁阻电动机位置估测算法中脉振电压信号注入法进行了分析,探讨了现有方法反馈信号处理过程中需要进行相位补偿的问题。利用d轴高频信号与q轴高频信号相位滞后保持一致的特点,使用d,q轴电流的乘积及低通滤波器,将d,q轴电流高频信号乘积作为供PI环节跟踪的误差信号,实现角位置的跟踪。相较于原方法,本方法不需要进行反馈高频信号的相位跟踪及参考正弦信号的滞后相位补偿。在不增加系统运算量的前提下减小了角位置估测算法的误差,提高了算法的稳定性。通过电机实验,对比本文改进方法和原方法的角位置跟踪效果,在转速45 r/min下观察到本方法相较原方法,具有跟踪误差更小,稳定性更好的实验结果,论证了本方法的有效性和优点。
猜你喜欢
大电机技术(2022年5期)2022-11-17
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
防爆电机(2021年4期)2021-07-28
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
时代人物(2019年29期)2019-11-25
电子制作(2018年19期)2018-11-14
智能建筑电气技术(2015年5期)2015-12-10
