
基于PR控制器的航空PMSM发电弱磁稳压方法
2019-04-25 02:45史世友夏加宽王婧妍李天元龙宇航
微特电机 2019年4期
史世友,夏加宽,王婧妍,李天元,龙宇航
(沈阳工业大学,沈阳 110870)
0 引 言
近年来,针对航空起动/发电技术的研究,270 V直流高压成为我国学者最新研究的热点[1]。永磁同步电机(以下简称PMSM)是整个系统电能转换与传递的重点,而由于其具有可靠性高、结构简单、功率大和功率体积之比大等优点,使PMSM成为国内外学者研究的热点。PMSM因为具有可逆运行原理,可分为电动和发电两种运行状态,在这两种状态下设计起动和发电两种系统:在航空发动机没有点火起动时,电机处于电动状态,拖动航空发动机;当航空发动机点火成功以后,发动机反过来带动电机发电,电机处于发电状态,为机上设备提供电源。因此,起动/发电机的电流和电压质量成为重点。
航空发动机拖动PMSM处于发电状态时,由于发动机速度时刻变化,导致发电机输出电压频率和幅值也时刻变化。因此,PMSM发电系统整流与稳压控制策略维持着整个系统输出恒定的直流母线电压[2]。文献[3]采用二极管不控整流电路后接Buck斩波电路实现稳压,但是在高转速时,对DC-DC电路中功率器件的耐压或耐流选型造成困难而且谐波含量较大。文献[4-5]采用基于单电流弱磁稳压控制和基于d轴电压弱磁稳压控制策略实现稳压,矢量控制中通常采用PI直流调节器控制电流环,对d,q轴电流id,iq进行控制时,需要将发电机的三相电流进行2/3变换,转化到静止坐标系下,再将PI控制器的输出信号与反馈信号在静止坐标系下执行,得到静止坐标系下的d,q轴电压,最后再次经过2s/2r变换,转化为同步旋转坐标轴下电压,坐标的多次旋转变换,增加了控制算法的实现难度[6],在电机上升到高速时,d,q轴电流就会有耦合现象。为实现电流解耦控制,获得系统良好的动态性能,控制系统中需要引入相关电机参数,影响系统的抗干扰性;此外,为降低PMSM损耗和温升,同时提高航空电源质量,需要对整个系统的低次谐波进行抑制,基于PI控制器的系统需要经过多次复杂的高低通滤波和坐标变换,增大了系统的控制算法实现难度[7]。
本文利用比例谐振(以下简称PR)控制器实现在d,q轴坐标系下对交流电流信号进行无差调节,不需要多次坐标变换,省去电流之间耦合项,而且容易实现多次谐波的抑制补偿。将其引入到基于电压反馈弱磁的航空永磁起动/发电系统电流调节之中,可以在系统中同时兼顾电机宽转速范围下的稳压和电流谐波的抑制,提高航空起动/发电系统的鲁棒性和航空电源质量。
1 PMSM数学模型
在d,q轴坐标下,PMSM的电压方程:
(1)
PMSM的输出电磁转矩:
(2)
式中:ud为d轴电压;id为d轴电流;uq为q轴电压;iq为q轴电流;Rs为电机内阻;Ld为电机等效d轴电感;Lq为电机等效q轴电感;Ψf为电机永磁体磁链;p为电机极对数[8]。
2 PMSM发电弱磁控制原理
由PMSM数学模型可以看出,励磁电流id和转矩电流iq决定了电机的工作状态。当iq,id都小于0时,PMSM处于发电运行状态。多组id,iq值组成了PMSM运行的电流轨迹。但在实际发电运行过程中,id和iq不能无限制取值,需要考虑PWM整流器中开关管耐电流值和电机温度等条件,需要对电流进行限幅,设ismax为电流最大值[9]。
由于id和iq取值有范围限制,因此ud和uq也有取值范围;同时因为整流器直流母线电压是恒值,使得电机端电压幅值受限,设其最大值为usmax。直流母线电压udc决定调制电压最大值usmax,在SVPWM控制策略方式下,最大值可表示:
(3)
电机在发电运行状态满足以下方程[10]:
(4)
将式(1)代入式(4),则对电压的限制也可以转化为对电流的限制:
(5)
由式(4)、式(5)可以得到以id,iq值为变量下,基于id,iq坐标系的PMSM运行轨迹图,如图1所示。PMSM工作在第三象限时,处于发电状态,由式(4)可得到电机运行时id,iq值形成的电流极限圆;由式(5)可得到不同转速下电机运行时的电压限幅值曲线,也叫电压极限椭圆[11]。图1中,最大转矩电流比(以下简称MTPA)控制策略下,A点是三线交叉重合点。随着原动机拖着PMSM转速升高,根据发电MTPA控制策略,电机按照图1的曲线AB-BC运行,保证电压和电流都在控制系统的限值范围以内。
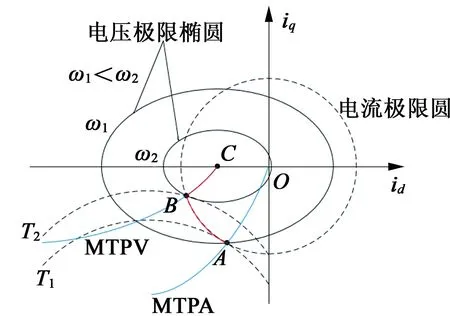
图1定子电流矢量轨迹
当航空发动机以较低转速拖动PMSM处于发电状态时,控制系统采用发电MTPA的控制策略。可以看出,此时电流工作点位于图1中A点,PMSM以最小定子电流被拖动起动[13]。随着航空发动机转速的上升,PWM整流器的直流母线电压udc维持恒定,电压极限椭圆慢慢变小,PMSM的反电动势越来越大,将受到电压极限椭圆的限制,此时就要增加负向的id电流,起去磁作用,降低电机反电动势,维持直流母线电压不变。基于发电MTPA控制与电压弱磁反馈法的框图如图2所示。

图2基于发电MTPA控制与电压弱磁反馈法控制框图
3 PR控制器
3.1 PR控制器模型
PR控制器由比例环节和二阶积分环节构成,其传递函数[15]:
(6)
式中:Kp为比例常数,Ki为控制器的积分常数;ω0为控制器设定的谐振频率。PR控制器与PI控制器的根本区别在于它的积分环节为二阶。 将谐振频率ω0=400 rad/s和Ki=100代入式(6)中,波特图如图3所示。

图3PR控制器波特图
由图3中可以看出,在谐振频率ω0附近的较小带宽内,增益远远大于其他频率的增益。因此,当输入的交流信号频率为ω0时,s=jω0,由式(6)可知,此时传递函数的增益变得很大,可以实现输入交流信号的无静差跟踪。在航空永磁同步电机发电系统控制中,将发电矢量控制中电流环的励磁电流id,转矩电流iq经过2s/2r变换,转换为同步旋转坐标轴下的交流量iα和iβ,输入到PR控制器中进行调节,只需设置转速的角频率为ω0,即可对PWM变换器电流进行控制,实现电机电流环中PR控制器的自适应调节。
3.2 改进型PR控制器
由图3中可以看出,只有频率在谐振点ω0处时,此传递函数有较高的增益,而在其他频率点处,传递函数增益非常小,因此存在高增益、带宽过小的不足,这就会导致系统对于输入信号的频率选择性很低,在实际应用中容易引起系统波动。为了加大传递函数的带宽,提高系统的稳定性,采用改进型PR控制器模型[16]:
(7)
式中:ωc为系统截止频率。当谐振频率一定时,取ωc=2 rad/s和ωc=20 rad/s,得到如图4所示的波特曲线。

图4改进后PR控制器波特图
由图4可见,ωc的引入,虽然改善了控制器频率特性,但没有改变传递函数在谐振频率点ω0处具有最大增益的特性。当ωc变小后,传递函数的选频特性也越好,因此,需要根据实际应用来选择ωc的取值。
3.3 改进型PR控制系统谐波补偿性能
在航空PMSM发电状态中,电机输出的三相电流除去开关频率附近的高次谐波外,主要含有5,7,11次等低次谐波电流。低次谐波会引起电机噪声大、电机转矩脉动和温升高等不良后果。因此,航空电源需要整个发电系统能够抑制这些低次谐波。图5为PI控制器5次谐波抑制结构图。

图5PI控制器5次谐波补偿结构图
从图5可以看出,对航空电源发电系统中的5次谐波进行抑制补偿时,需要进行多次复杂的高低通滤波和坐标变换。如果需要同时对7,11次等谐波进行补偿时,就需要多个这种复杂结构,系统复杂性大大增加。
将式(7)改进PR控制器传递函数中的ω0变为kω0(k=5,7,11,…),可以得到发电系统中多次谐波补偿项:
(8)
式(8)的传递函数只针对频率kω0具有高增益,因此,可在PR控制器的传递函数中并联多个传递函数,同时抑制发电系统中的多次谐波。针对系统中存在的5,7次谐波电流,采用如图6所示的结构。

图6多次谐波补偿结构图
从图5和图6的对比可以看出,在系统的低次谐波补偿上,PR控制结构简单,比PI控制策略下的谐波补偿算法更容易实现。
4 仿真结果及分析
根据上述PMSM控制策略的分析研究,进行仿真验证。PMSM的参数如表1所示。

表1 PMSM参数
发电系统控制框图如图7所示,基于MATLAB中Simulink搭建相应的仿真模块。其中uref=270 V,ismax=300 A。

图7PMSM整流稳压系统框图
仿真中,输出功率30 kW,给定负载电阻RL=2.43 Ω,PMSM发电状态给定转速为6 600~14 000 r/min斜坡函数,仿真得到如图8所示的系统输出电压与转速波形。
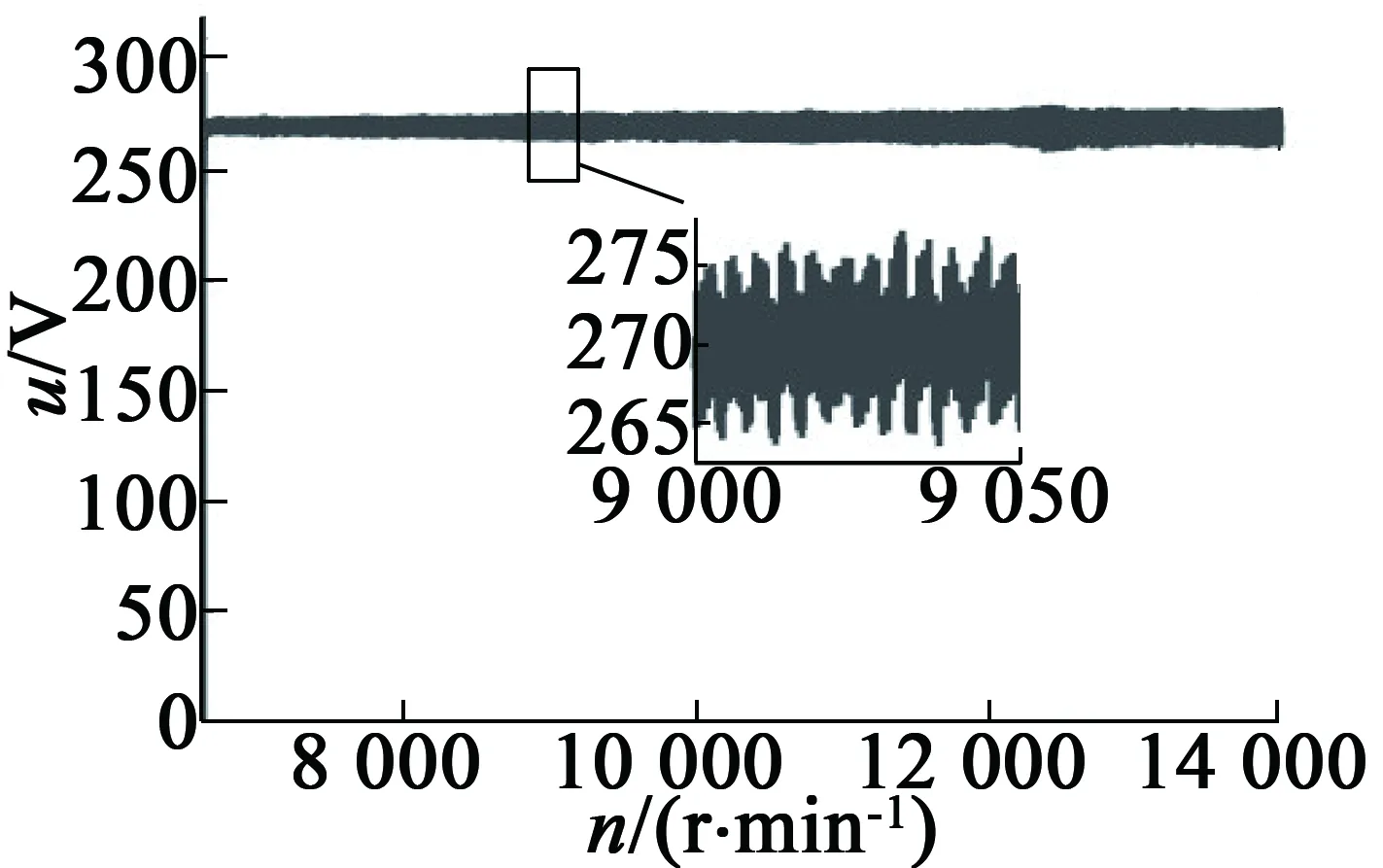
(a) 整个转速范围内输出电压波形

(b) 交直轴电流波形
图8宽速下的输出电压和电流波形
从图8(a)中可以看到,在航空发动机转速从6 600~14 000 r/min变化范围内,航空发电系统输出电压能始终保持270 V,实现了该转速范围内的恒压恒功率输出。由图8(b)可以看出,随着航空发动机转速的上升,PMSM直轴电流id不断反向增大,说明为维持母线电压恒定,弱磁不断加大,交轴电流iq随之正向变大。
为了验证负载变化时整流稳压控制发电系统的动态性能,设定PMSM为额定转速12 078 r/min,在输出电压恒定后将负载从30 kW突卸到15 kW以及负载从30 kW突加到60 kW时,输出的直流电压动态调节过程如图9所示。

(a) 突卸负载电压波形
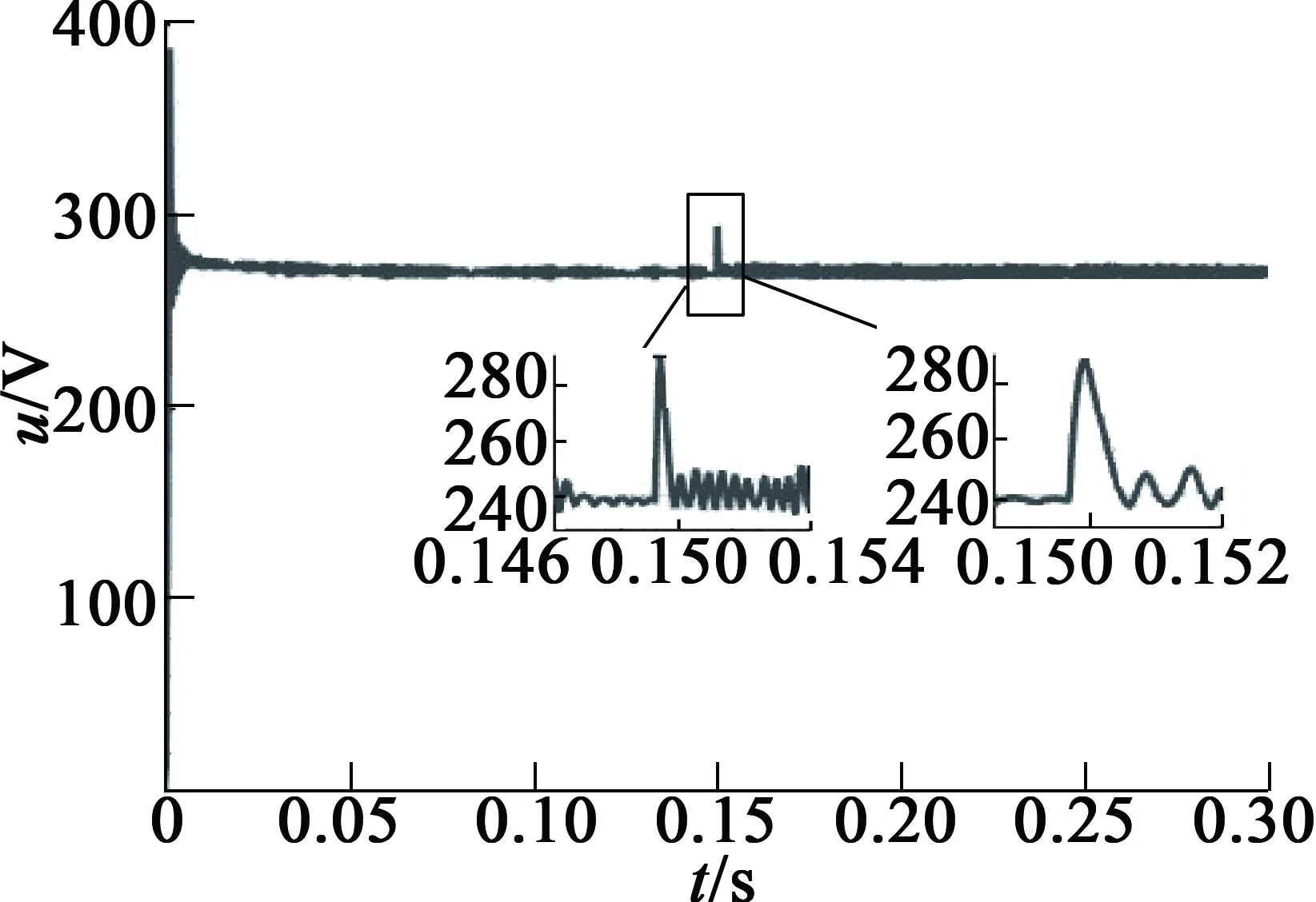
(b) 突加负载电压波形
图9突卸、突加负载时输出电压波形
由图9可以看出,输出电压基本保持270 V不变,输出电压纹波为2 V。从图9(a)可以看出,当负载电阻突然增加一倍,输出电压会有突然的下降,但是经过0.001 s后,电压立即恢复到270 V;从图9(b)可以看出,当负载电阻突然减小一倍,输出电压会有突然的上升,但是经过0.001 s后,电压立即恢复到270 V。整个动态过程说明该发电整流稳压控制系统具有良好的动态响应能力和高品质电源质量。
基于PI控制器与PR控制器的发电系统电流傅里叶分解频谱如图10所示,对比可以看出,电流畸变系数减小,而且5,7次电流谐波含量较之前分别降低52%,44%。

(a) PI控制器电流谐波分析

(b) PR控制器电流谐波分析
图10PI控制器与PR控制器谐波分析
5 系统实验分析
采用DSP TMS320F28335作为控制核心的航空永磁起发电系统结构如图11所示,发电稳压控制器由控制部分、功率部分和检测部分组成。控制部分电路实现的功能包括控制器的最小系统、远程通讯、数据存储和掉电保存、数码管显示、外部输入输出指令、速度检测、三相电流反馈、PWM信号输出电路和错误报警等。功率部分电路实现功能包括系统供电电源、三相电流反馈调理、六路PWM信号放大和电容预充电等。检测部分实现功能有三相电流检测和电机速度检测。实验中将采用PI控制器和PR控制器两种方法,通过实验对比分析证明基于PR控制器的PMSM发电稳压具有良好的动态响应能力,而且三相电流谐波含量更小。基于DSP的航空永磁起发电系统实验平台如图12所示。
实验中,PWM整流器开关频率为20 kHz,电感为150 μH,实验过程中需要反复调整控制器参数,以得到最优的效果。

图11基于DSP的航空永磁起发电控制系统框图

图12基于DSP的航空永磁起发电系统实验平台
因为飞机大部分的工作点运行在额定转速上,因此,给定涡轮机转速为12 078 r/min,测得系统后端电压如图13所示。

图13航空永磁起发电系统输出电压
分别测得基于PI控制器和PR控制器的三相电流如图14,图15所示。由图15可知,基于PR控制器的航空永磁发电系统电源质量更高,谐波含量更少。

图14基于PI控制器的三相电流
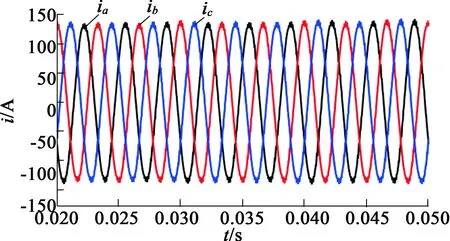
图15基于PR控制器的三相电流
6 结 语
航空永磁发电系统受到较宽转速范围、负载变化大和高质量电源要求的影响,本文研究基于PR控制器的电压反馈弱磁稳压控制策略来适应宽转速范围和谐波补偿,提高系统动态响应和电源品质,在PWM可控整流基础上,引入电压反馈弱磁稳压控制策略,进一步扩大稳压的转速范围。仿真和实验结果表明,所设计的基于PR控制器的航空PMSM发电控制系统可以实现航空发动机宽转速范围内的直流270 V恒定以及突加、突卸负载时具有良好的动态响应能力,电流谐波含量小,实现了航空电源高标准的要求。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
水泥工程(2020年4期)2020-12-18
电子制作(2018年18期)2018-11-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
电子制作(2018年9期)2018-08-04
电子制作(2016年21期)2016-05-17
探测与控制学报(2015年4期)2015-12-15
安徽化工(2015年4期)2015-12-12
