
“嫦娥五号”月球探测器隔热组件高温模拟与控制技术
2019-04-25 02:13:50葛哲阳邹世杰王奕荣
航天器环境工程 2019年2期
朱 熙,葛哲阳,邹世杰,郭 赣,王奕荣
(北京卫星环境工程研究所,北京 100094)
0 引言
我国“嫦娥五号”月球探测器的目标是实现月球月壤采样并返回地球。月球探测器在着陆时一般采用大推力器来降低其着陆速度。推力器附近的隔热组件由于受到辐射和羽流的综合影响,会在短时间内达到很高的温度。根据“嫦娥五号”月球探测器的研制要求,需要对其中的隔热组件在真空环境下进行瞬态高温热性能试验,即在140 s内将其温度准确控制到970 ℃,并且温度超调量不大于5 ℃,以模拟多层隔热组件朝向发动机一侧的温度边界条件,考核隔热组件的隔热性能。
红外灯是红外模拟系统中的一种常用加热器,具有功率动态控制能力强、遮挡小、可重复使用、无污染等优点,在航天器热模拟试验中得到广泛使用[1]。红外灯可提供色温高达2450 K的辐射热流,与其他加热器相比更接近发动机喷管的辐射特性。因此,采用高密度的红外灯阵列不仅可以提供较高的热流密度,而且可以准确地模拟发动机喷管的辐射特性。
美国NASA的兰利和德莱顿研究中心[2-3]、俄罗斯中央机械研究院强度研究所[4]、德国DLR IABG实验室[5],都将红外灯作为高速飞行器气动加热试验模拟的主要手段。刘守文等[6-7]通过对红外灯特性的研究,得到了其空间热流分布函数;研究了用红外灯阵实现瞬变热流的模拟技术,解决了红外灯用于航天器真空热试验中的一些技术问题;并对航天器真空热试验用红外灯的光谱分布进行研究,通过对红外灯电流、电阻的相关分析和数值拟合,建立了红外灯的功率计算模型。在温度控制算法方面,季月明[8]在常温大气条件下建立了红外灯作为加热源实现试件温度控制的试验装置,采用了模糊控制理论,仿真计算以及具体试验表明:该控制方法具有适应性强、控制精度高、可明显抑制试验系统温度滞后的优点。张军等[9]研究了通过极点配置自适应PID控制器的设计,较好地解决了航天器热真空试验中控制系统智能性差和超调量大的问题。
本文在研究真空热试验红外灯特性的研究基础上,对红外灯不同的控制方式进行研究,提出了采用功率控制代替常规的电流控制的新方法;通过对高精度快速温度控制算法的研究,采用双曲余弦变增益环节的非线性 PID 控制器对“嫦娥五号”月球探测器隔热组件进行温度控制,以满足既具备快速升温能力又保证隔热组件温度控制过程中具有较小的超调量。
1 红外灯动态特性研究
一般通过电流控制红外灯,即由程控电源输出某一电流值,将该电流值加载至红外灯从而对试件进行加热。
由于红外灯的电阻值随着温度的升高会迅速增大,使其具有很强的非线性和时变特性。对于非线性特性,可以设计非线性环节予以抵消[10]。而动态时间常数具有较大变化范围的时变特性会对系统动态特性产生很大的不确定性影响[11]。为了实现红外灯的快速升温,必须对其时变特性进行研究,选择合适的控制方式减小其动态时间常数。
在冷态(红外灯的灯丝温度处于常温)情况下,对红外灯加载电流,在同一电流情况下测试60 s,每隔3 s读取红外灯的功率。图1是电流由0 A阶跃至2 A后的功率变化曲线,图2是电流由0 A阶跃至3 A后的功率变化曲线。从图1和图2可看出,红外灯的输入电流发生阶跃变化时功率的变化呈现为一阶惯性环节。
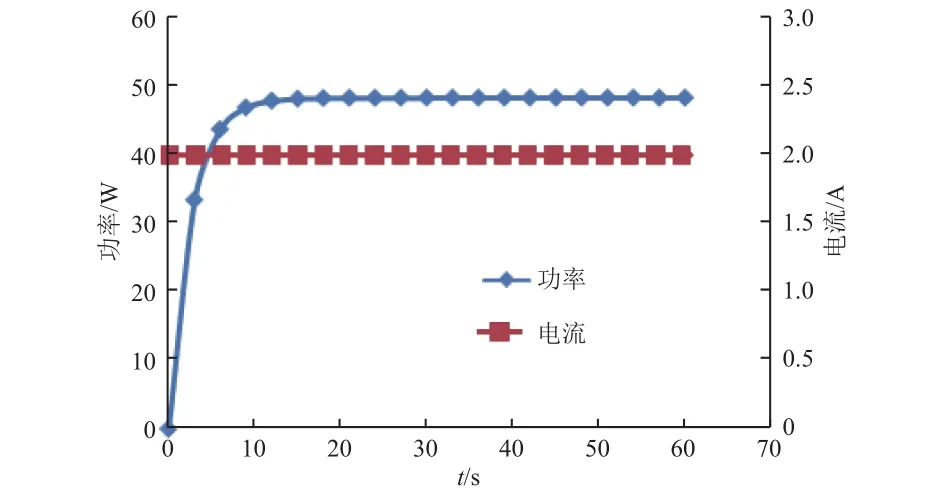
图1 电流由0 A阶跃至2 A时红外灯的功率变化曲线Fig. 1 The power curve of the infrared lamp after the current is jumped up from 0 A to 2 A
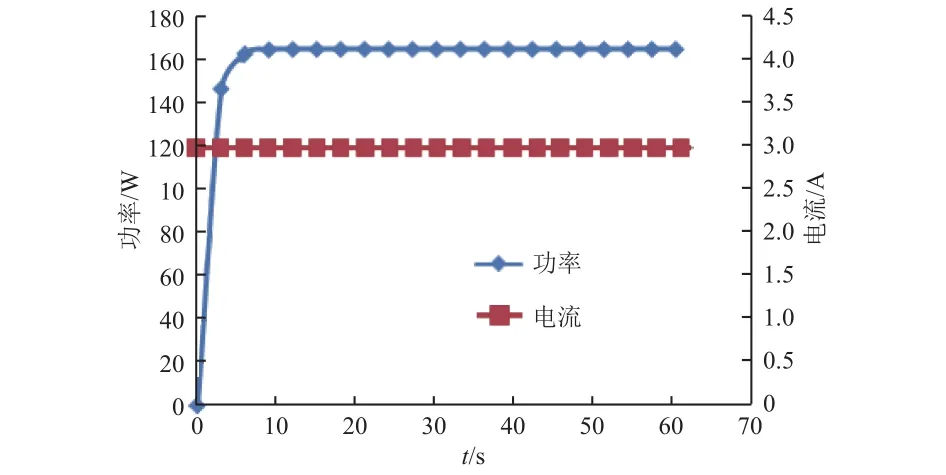
图2 电流由0 A阶跃至3 A时红外灯的功率变化曲线Fig. 2 The power curve of the infrared lamp after the current is jumped up from 0 A to 3 A
根据图1、图2电流与功率的开环响应曲线,可以用一阶惯性模型近似表示红外灯电流与功率的关系,其开环传递函数如式(1)所示。它的关键参数有2个,即开环增益K和时间常数T。
在冷态情况下,以0.15 A为间隔对红外灯加载不同电流,每个电流加载60 s,读取每个电流对应的红外灯功率。图3是电流由0 A加载至4.95 A的功率变化曲线。从图3可看出,红外灯的功率随着电流的增加迅速增大。
对红外灯加载不同的电流,测试红外灯在该电流下的时间常数。并根据电流与稳态功率的对应关系,对红外灯加载与该电流对应的功率,测试红外灯在该功率下的时间常数。图4是红外灯在电流控制和功率控制下的时间常数对比,可看出红外灯的时间常数随着电流或功率的增加而迅速减小,采用功率控制比电流控制的时间常数更小,当红外灯的功率大于200 W时,其时间常数小于1 s。
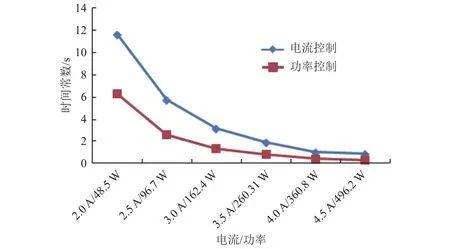
图4 红外灯时间常数随电流/功率变化曲线Fig. 4 Time constant of the infrared lamp against the current/power
可见采用功率控制能使红外灯具有更快的动态响应速度,从而大幅降低红外灯的时变特性对系统动态特性产生的不确定性影响。
2 高精度快速温度控制算法
2.1 系统模型
“嫦娥五号”月球探测器隔热组件(以下简称隔热组件)温度控制系统模型如图5所示。

图5 隔热组件温度控制系统模型Fig. 5 System model for temperature control of multilayer insulation
控制器由变增益环节ke和PID控制器Gp(s)组成,被控对象由二阶线性环节Gc(s)来表示,其中,
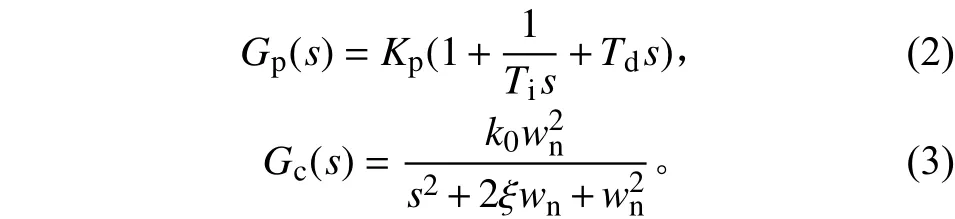
2.2 非线性变增益环节
非线性变增益环节的主要目标是在保证小偏差时具有较小超调量的前提下,提高大偏差时的温度控制速度。
根据以上需求,本文采用了双曲余弦变增益环节的非线性PID。采用双曲余弦函数增益的非线性控制方程为
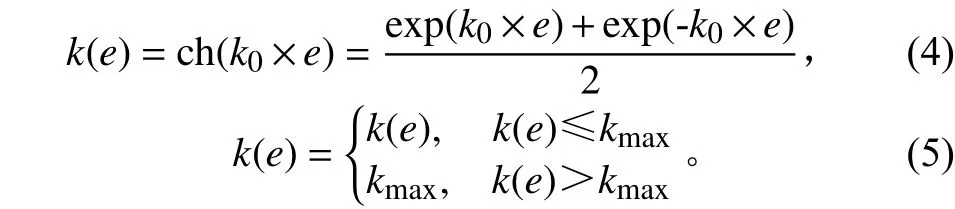
式中:e为偏差;kmax为增益最大值。双曲余弦函数的值域为[1, +∞]。如果不对非线性函数施加任何限制,在误差变化较大的区域,可能出现非线性补偿引起系统的比例增益过大而使系统振荡的现象,所以在式(5)中对增益最大值进行了限制。
对于上述非线性增益函数k(e),当k0=0.05,kmax=5时,增益k(e)随偏差e的变化曲线如图6所示。
当偏差较大时,非线性变增益环节产生较大的补偿增益,系统的控制作用得以加强,使系统具有更快的响应能力。随着被控量趋近目标值,偏差得以变小,此时非线性变增益环节将自动补偿增益衰减,以此防止系统产生较大超调。
2.3 PID 参数整定
为了快速获得隔热组件的PID控制参数,本文采用基于给定相角裕度的PM法整定PID参数。控制系统中设置测试模态和调节模态2种模态,如图7所示。首先将开关与a点接通,系统在测试模态下,由一个继电非线性环节来测试系统的振荡频率和增益;而在调节模态下,首先由系统的特征参数得到PID控制器参数,然后由PID控制器对系统的动态性能进行调节。调节过程结束后,再将开关与b点接通,系统切换到PID控制。如果系统的参数发生变化,则需要重新进入测试模态进行测试,测试完毕后再回到调节模态进行控制。
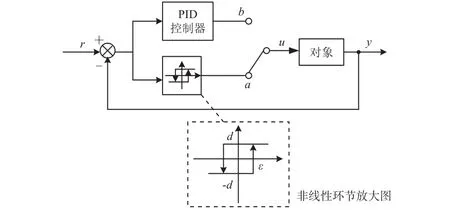
图7 PM法整定的原理Fig. 7 The principle of PM self-tuning
如图8所示,当采用带有滞环的继电器时,该非线性环节的描述函数的负倒数为

-1/N(A)是平行于负实轴的一条直线(见图8),选取不同的ε和d值,可以确定出给定虚部的Nyquist曲线上的某一点Q。通过改变PID算式中的Kp、Ti和Td值,可使Q点移动到任意位置[12]。
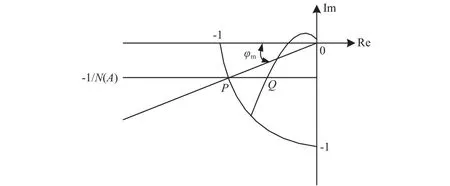
图8 -1/N(A)和Nyuist曲线Fig. 8 -1/N(A) and the Nyuist curves
设P点坐标为 (-cosφm,-jsinφm),Q点坐标为(-x,-jsinφm),可得

测试模态时,系统在自整定状态下按继电控制方式运行。此时将Q点移到P点所需的PID参数为
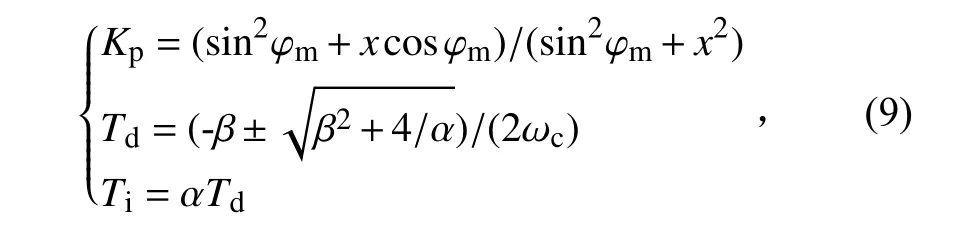
式中:α为给定系数;β =(cosφm−x)sinφm/(sin2φm+xcosφm);ωc为自振角频率。
3 试验验证
隔热组件高温模拟与控制系统由计算机、电源、红外灯阵、隔热组件、K型热电偶、数据采集仪器组成,如图9所示。

图9 隔热组件温度控制系统结构框图Fig. 9 Block diagram of temperature control system for multilayer Insulation
隔热组件与红外灯阵一起构成被控对象。数据采集仪器采集粘贴在多层隔热组件上的K型热电偶数据,安装于计算机内的数据采集软件将热电偶数据转换为温度测量值,温度控制算法根据试验温度给定值和温度测量值计算电源应输出的电流值,从而对红外灯阵进行加热控制。
采用PM整定方法,分别在600、800和970 ℃对PID参数进行整定,得到参数如表1所示。可知,系统静态增益参数Kp的变化范围很小,而参数Ti和Td的变化正好反映了系统随温度增高其动态特性变快的特性。
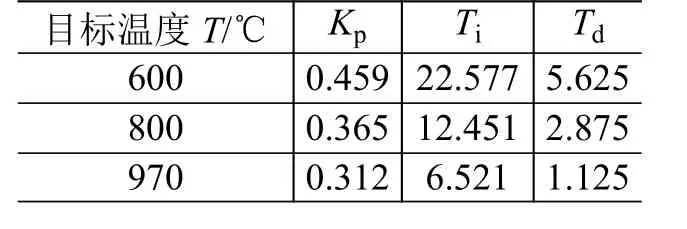
表1 不同目标温度对应的PID参数整定结果Table 1 The PID parameter setting result corresponding to different target temperatures
设定最终目标温度为970 ℃,在参数整定的基础上,运用上述非线性PID控制,控制曲线如图10所示。试验结果表明:135 s时多层隔热组件的温度就达到了稳定状态,超调量仅为0.5 ℃;在随后的800 s,温度控制偏差全部在0.5 ℃以内。
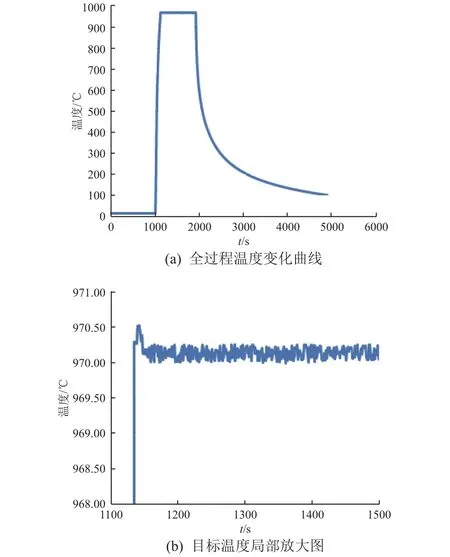
图10 目标温度为970 ℃的温度控制曲线Fig. 10 Temperature control curve for target temperature of 970 ℃
4 结束语
根据“嫦娥五号”月球探测器隔热组件的瞬态高温试验要求,本文采用红外灯加热器进行高温模拟,对红外灯的动态特性进行了测试和分析。以PM法整定PID参数为基础,提出了一种双曲余弦变增益环节的非线性PID控制器。研究结果表明:通过对红外灯动态特性的研究,采用功率控制替代常规的电流控制,可以使红外灯具备快速升温的能力。本文提出的高精度快速温度控制算法具有控制速度快、超调量小的特点,在实际试验中控制效果良好。此研究成果还可应用于高超声速飞行器、返回式航天器以及其他深空探测飞行器等的涉及高温高热流的型号试验。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28 08:22:00
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
电子制作(2019年19期)2019-11-23 08:41:36
重型机械(2019年3期)2019-08-27 00:58:52
电子制作(2018年19期)2018-11-14 02:37:02
制造技术与机床(2017年3期)2017-06-23 08:11:38
电子制作(2016年21期)2016-05-17 03:53:01
物探化探计算技术(2014年1期)2014-06-27 01:32:50
河南科技(2014年14期)2014-02-27 14:11:54
电子设计工程(2014年18期)2014-02-27 12:00:19
