
SVM在起重机起升机构安全评价中的应用
2019-04-22 00:39
中国特种设备安全 2019年12期
(陕西省特种设备检验检测研究院 西安 710048)
起重机的起升机构主要是用来在垂直方向上提升货物的,是起重机械不可或缺且最重要的基本组成部分,起升机构能否安全运行直接影响整机的工作性能和安全状况。近年来,由于起升机构中部件失效造成的重大安全事故屡见不鲜,所以,在起重机的检验中,如何准确的评价起升机构的安全状况具有重要的意义。起升机构主要包括电动机、制动器、减速器、钢丝绳、卷筒、滑轮、吊钩等主要安全部件,评价指标繁多,目前,起重机起升机构评价方法主要有故障树分析法、层次分析法以及PHA-FMEA(预先危险性分析——故障类型和影响分析)等评价方法,这些传统方法评价过程烦琐且人为干涉因素大,存在资源浪费以及安全隐患。
随着科学技术的发展,人工智能机器学习方法在起重机安全评价中的应用越来越多,例如神经网络和SVM(支持向量机)。神经网络是利用大量神经元之间的相互作用并以一定的学习准则进行学习来模拟人思维的一种智能机器学习方法,SVM是在统计学习理论和结构风险最小原理的基础上并将最优化理论应用其中来解决问题的一种智能机器学习方法,该方法相对于神经网络最大的优点是在对小样本数据进行训练学习中能够得到最优解。本文利用SVM(支持向量机)算法理论并结合MATLAB编程工具首先对多年现场检测并经过量化后的起升机构评价指标中的样本进行训练得到映射模型后,然后对测试样本进行预测,最终建立了起升机构安全评价系统。
1 SVM理论介绍
SVM作为一种新的智能机器学习方法,主要是利用统计学习理论的原理和结构风险最小化原理,通过对小样本数据进行学习训练,建立空间映射模型后,对所需的样本数据进行预测,得到最优解。SVM主要分为支持向量分类机和支持向量回归机,二者主要不同在于支持向量分类机是寻找一个最优分类面使得训练样本类别分开,支持向量回归机是寻找一个最优分类面使得所有训练样本到该平面的误差最小。本文主要利用SVM的支持向量分类机原理将起升机构七个评价指标的评价结果分为四个等级,并将评价结果与评价等级分别作为样本的输入数据与输出数据建立映射关系,通过机器学习,最终得到映射模型。
SVM根据Largrange对偶理论以及通过引入核函数K(xi,xj)将原空间的样本映射到高维特征空间,最终得到如式(1)所示:

式中:
αi,αj——Lagrange 乘子;
C——惩罚因子;
xi——支持向量;
xj——未知向量;
yi,yj——分别为其输出值,K(xi,xj)=Φ(xi)Φ(xj)。
式中:
w*——最优分类超平面的法向量。
最终得到最优分类函数为:

式中:
b*——最优分类超平面的平移量。
2 起重机起升机构安全评价系统建立
本文利用MATLAB作为系统开发平台,并利用LIBSVM工具箱中的源程序,根据实际情况通过对程序进行修改、改进,最终建立起升机构的安全评价系统。利用LIBSVM建立起升机构的安全评价系统的主要步骤为:1)分别获取训练集的训练输入与输出样本,并按照所要求的格式进行储存;2)对训练样本进行归一化处理;3)合理选取核函数;4)采用交叉验证的方法寻找最佳参数惩罚因子c与核函数方差g;5)利用最佳参数对训练样本进行训练,得到支持向量机的映射模型;6)对训练完成的映射模型进行测试并预测。
2.1 训练样本集的获取
训练样本集主要由训练输入样本与训练输出样本组成。针对起升机构安全评价系统,该训练输入样本主要由电动机、制动器、减速器、钢丝绳、卷筒、滑轮、吊钩七个评价指标值组成,每个评价指标值可以用映射法以及专家经验法两种方法综合并最终量化得到。映射法的步骤首先将评价指标分为安全范围区间段和非安全范围区间段,安全范围区间段用(60~100)进行量化,非安全范围区间段用(0~60)进行量化,最小值为0。安全范围区间的量化值用式(4)进行计算:

式中:
y——量化值;
x——某一项的检测测量值;
a、b——安全范围值的上、下限,可以通过起重机安全规范查取。
非安全范围区间的量化值用式(5)进行计算:

以某起重机卷筒为例,在定期检验中测量其磨损的筒壁厚度与原壁厚的比率为93%,根据GB 6067.1—2010《起重机械安全规程》可知卷筒报废的标准之一为筒壁磨损达到原壁厚的20%,所以对于卷筒壁厚而言,其安全范围值的上、下限分别为80%与100%,代入式(4):
卷筒的另一个安全评价指标是卷筒是否存在影响性能的表面缺陷,其可以通过专家经验法进行打分得到,最终与卷筒壁厚磨损量化值综合得到最终的卷筒安全评价指标值。起升机构安全评价系统的其他指标值同样可以通过以上两种方法得到。

训练样本集的输出样本是指起重机起升机构的安全评价等级。根据起升机构安全评价指标值的不同,本文将其安全评价等级分为四个等级,并分别用数字表示。安全评价等级说明,见表1。

表1 起升机构安全评价等级说明
以某10t起重机起升机构为例,通过检验人员现场检验并对起升机构安全指标量化处理后,得到一组训练样本,见表2。
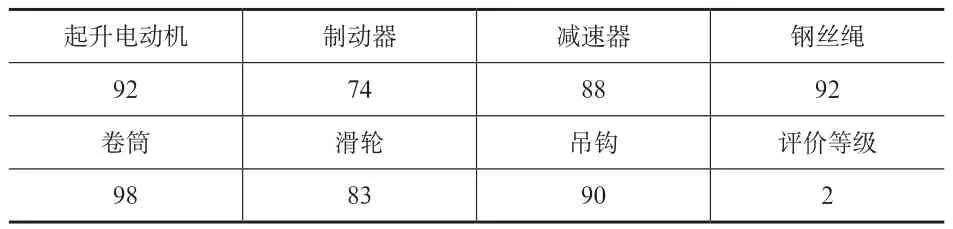
表2 训练样本示例
2.2 安全评价系统映射模型的建立
本文收集了检验人员对起重机起升机构7个安全评价指标现场检验得到的数据,然后通过映射法和专家经验法对其进行量化,最终整理得到了65组训练样本数据,其中包含不同类型起重机、不同安全评价等级的样本数据。训练样本按照所要求的格式进行储存后,首先要经过归一化处理,本文利用MATLAB自带的mapminmax函数实现训练样本的归一化。其次,考虑到核函数的选取对模型性能的影响,本文以样本分类的准确率为目标,通过对常用的四种核函数进行对比,最终采用径向基核函数作为模型训练的核函数,然后,利用交叉验证的方法寻找最佳的惩罚因子和核函数方差。
本文将65组训练样本数据分为两部分,其中50组样本作为训练集,15组样本作为测试集,其主要目的是利用15组测试集样本对训练完成的映射模型的性能进行验证。
利用改进的LIBSVM工具箱对50组训练样本进行训练并建立映射模型后,便可以通过输入矩阵函数对15组测试样本的安全评价等级进行预测。
2.3 预测结果与真实结果的误差分析
15组测试样本作为65组训练样本数据的一部分,其安全评价等级的真实结果可以通过MATLAB函数从65组训练样本数据中提取出来,见表3。

表3 测试样本安全评价等级真实结果
为了更加直观的观察、分析真实结果与预测结果,这里以图形的形式给出两种结果的对比,如图1所示。

图1 测试集预测结果对比
从图1可以看出,在对15组测试样本进行的安全评价等级预测结果中有14组预测结果与真实结果完全吻合,其预测正确率为93.3%,说明利用SVM算法建立的该起升机构安全评价系统映射模型具有良好的泛化能力,同时也说明了支持向量机对小样本训练数据的优越性。
另外,通过图1也可以看出,测试样本集6号真实安全评价等级为4级,而预测安全评价等级为3级,二者并不吻合,这是由于SVM算法针对多分类问题时在构造多个分类器组合的过程中势必会对分类的精度造成一定的误差,另外核函数的选择以及样本数据的归一化也会对映射模型性能带来一定影响,从而导致预测结果与真实结果并不完全吻合。但是由表1可知,两个等级都表明起升机构处于极不安全状态,都应立即采取措施消除其所带来的风险,若从定性的角度分析,其预测结果与真实结果相近,从另一个角度体现了按SVM算法理论进行起升机构安全评价的等级误差不大。
3 结论
本文利用SVM算法理论并结合MATLAB编程工具,通过对LIBSVM工具箱中的源程序进行改进,最终建立了起重机起升机构安全评价系统,通过对测试集样本中起升机构安全等级的预测,然后与真实安全等级进行比对,得到其正确率为93.3%。该结果表明了起重机起升机构安全评价系统具有良好的性能,验证了SVM针对起重机起升机构安全评价中小样本、非线性的特征具有很高的可靠性,为起重机起升机构安全评价提供了新的思路,在工程中具有一定的指导意义。
利用SVM进行样本训练并建立映射模型时,核函数的选择对模型性能有着重要的影响,如果选择不当,将会造成映射模型性能不理想,预测正确率较低;另外样本数据的归一化也会给模型性能带来很大的影响,特别是样本数据的取值不属于同一个数量级,输入变量差异较大,但归一化并非不可或缺,针对具体问题应具体分析。
SVM算法理论不仅可以应用于起重机起升机构安全评价系统的建立,对于其他三大机构的安全评价,该方法同样适用。另外,SVM与神经网络作为两种不同的人工智能机器学习方法,建议在以后的研究中对两种方法构建的模型性能进行对比,验证两种方法的优缺点。
猜你喜欢
中国修船(2022年2期)2022-04-28
中国特种设备安全(2022年1期)2022-04-26
起重运输机械(2021年24期)2022-01-11
科技创新与应用(2020年6期)2020-02-29
船舶与海洋工程(2018年5期)2018-11-14
设计(2017年13期)2017-10-31
现代电子技术(2016年23期)2017-01-12
北京理工大学学报(2016年6期)2016-11-22
船舶标准化工程师(2015年5期)2015-12-03
筑路机械与施工机械化(2014年4期)2014-03-01
