
基于优化极限学习机的大跨径连续桥梁施工线形预测
2019-04-22 10:49周双喜邓芳明喻乐华吴亮秦
铁道学报 2019年3期
周双喜, 邓芳明, 韩 震, 喻乐华, 吴亮秦
(1. 华东交通大学 土木建筑学院, 江西 南昌 330013; 2. 华东交通大学 电气与自动化工程学院, 江西 南昌 330013)
大跨径桥梁结构的分段施工需要经历长期、复杂的施工和结构体系的转换,对施工桥梁线形的精确控制可以保证各跨的顺利合龙和线形最优[1]。由于设计参数与实际施工时存在一定差异、施工荷载具有一定的不确定性、桥梁预应力存在一定的张拉误差以及混凝土随时间变化存在一定的收缩和徐变,在施工过程中,桥梁的实际状态与设计状态不可能没有偏差。这种偏差在施工的过程中不断累积,使得桥梁结构的受力状态发生变化,桥梁线形严重偏离设计目标。如果没有有效的施工过程控制技术,桥梁的使用性和可靠性会受到严重的影响[2]。因此,根据已完成桥段的结构数据,计算相应的调整参数,用于控制待施工桥段的施工过程,可以提高桥梁施工的安全系数,确保施工完成后,桥梁性能及线形能够符合设计要求[3]。
最小二乘法、卡尔曼滤波法、灰色理论法[4-6]等被广泛用于桥梁线形的预测和调整,但这些方法具有工作量大,只能进行线性关系的处理,且只考虑少量参数等缺点。随着机器学习和模式识别方法的发展,人工神经网络(Artificial Neural Network, ANN)被广泛应用于桥梁健康检测[7]和混凝土强度预测[8-9]等场合。与灰色理论、卡尔曼滤波等方法相比,神经网络不需要精确的数学模型,可以根据输入、输出之间的关系建立非线性映射。误差反向传递(Back Propagation, BP)神经网络作为最常见的一种神经网络,已被用于大跨径梁桥线形施工控制中[10-12],BP神经网络非线性映射能力强、耐噪声、容错能力强、鲁棒性好,可以有效拟合输入和输出之间的多参数、非线性映射关系[13-14]。然而,BP神经网络通常使用梯度下降法训练网络参数,即沿着误差函数的负梯度方向调整权阈值,因此需要多次迭代计算,收敛速度慢[15]。
极限学习机(Extreme Learning Machine, ELM)是近期提出的一种适用于单隐含层前馈神经网络(Single-hidden Layer Feed-forward Neural Networks, SLFNs)的高效学习方法[16],该方法不需要多次迭代训练,只需设置隐含层节点个数,并通过正则化最小二乘算法,即可得到输出层权值的唯一解。因此,ELM同时具有极快的收敛速度和良好的网络性能。然而,由于ELM的输入层到隐含层的连接权值和隐含层阈值均通过随机生成,不同的网络参数对应网络性能也不同,使得网络存在随机性。文献[17]利用遗传算法(Genetic Algorithm, GA)搜索最优的ELM隐含层的权值和阈值,得到了最优的ELM网络参数,提高了预测模型的准确率和泛化能力。虽然遗传算法具有随机搜索和并行计算的能力,是一种常见的参数寻优算法,但是经典GA的变异和交叉操作具有两面性,既可以产生更好的基因,也可能破坏原有的基因,且没有可靠方法判断是否达到全局最优,导致该方法仍然存在搜索时间长、难以避免局部最优等问题[18]。
针对BP神经网络收敛速度慢、极限学习机的随机性和GA优化能力的不足,本文提出一种基于思维进化(Mind Evolutionary Computation, MEC)算法和极限学习机方法的大跨径连续梁桥施工线形预测模型。思维进化优化算法作为一种寻优能力更强的寻优方法,沿袭了遗传算法中的基本概念,用趋同(Similartaxis)操作和异化(Dissimilation)操作代替了GA中的交叉和变异操作。趋同操作提供了并行搜索能力,提高了寻优效率,而异化操作不断更新当前的最优值,以避免陷入局部最优,二者交替进行,直至达到全局最优。最后对经过MEC优化、ELM训练得到的大跨径连续梁桥施工线形预测模型进行了预测实验,实验结果表明,相比于其他方法,基于本文所提出算法构建的梁桥施工线形预测模型具有更高的预测精度,对于测试样本的泛化能力更强,更加适用于实际施工中的线形控制应用。
1 算法原理
1.1 极限学习机
本文利用极限学习机监控大跨径桥梁的施工情况,测量其张拉后的施工数据,记录测量的立模标高的偏差样本,并用其训练极限学习机。然后,将待施工桥段的设计参数输入训练好的ELM,从而预测目标桥段张拉后所有已施工桥段立模标高的偏差值。根据立模标高偏差的预测值,即可获得现施工桥段的预应力张拉对所有已施工桥段的立模标高造成的偏差,进而做出相应的参数调整,提高桥梁施工质量。
一个含有l个隐含层节点的前馈神经网络结构见图1,其中,Xq=[xq1,xq2,…,xqn′]T,q=1,2,3,…,n为n个输入向量;G(x)为隐含层激励函数;{αij}n×l和{βjk}l×m分别为输入层到隐含层的权值矩阵和隐含层到输出层的权值矩阵;{bj}l×1为隐含层节点阈值。其中,n、m分别为ELM输入和输出层节点数;l为隐含层节点数。该ELM的m个对应输出向量Yq′=[yq′1,yq′2,…,yq′m′]T可以表示为
( 1 )
q′=1,2,…,mk′=1,2,…,m′k=1,2,…,n
设Tq′=[tq′1,tq′2,…,tq′m′]T为极限学习机的目标输出,若ELM能以0误差逼近Yq,则有
( 2 )
联立式( 1 )、式 ( 2 ),有
( 3 )
q′=1,2,…,mk′=1,2,…,m′k=1,2,…,n
将隐含层输出矩阵为H,则式( 3 )可以改写为
H·β=T
( 4 )
随机生成隐含层权值和阈值后,隐含层输出矩阵H也随之确定,通过求解式( 4 )的最小二乘解,即可得到输出层权值
β=H+T
( 5 )
式中:H+为矩阵H的Moore-penrose广义逆矩阵。
虽然ELM可以迅速得到输出层权值的最优解,但随机生成的隐含层权值和阈值给网络的预测精度和泛化能力带来了很大的不确定因素。因此,本文采用思维进化算法优化极限学习机的初始权值和阈值,以提高其预测精度和泛化能力。
1.2 思维进化算法
思维进化算法通过模拟人类的思维过程实现参数优化。该方法可以依概率1收敛于全局最优状态[19-20]。该方法的基本结构见图2,其基本概念如下所述:
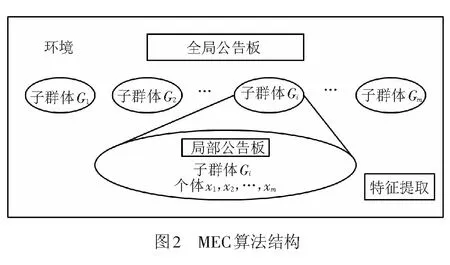
(1) 群体和子群体
参与优化过程的所有样本空间构成群体。一个群体由若干个子群体构成,子群体根据得分高低分为优胜子群体和临时子群体。
(2) 公告板
用于记录群体的基本信息,根据内容不同分为记录子群体相关信息的全局公告板和记录对应子群体中个体信息的局部公告板。
(3) 趋同操作
该操作在同一个子群体中不断寻找最优个体,当某个子群体无法得到得分更高的个体时终止该操作。此时,称该子群体成熟。
(4) 异化操作
1.3 MEC-ELM预测模型
利用思维进化算法搜索最优的极限学习机初始权值和阈值,首先根据极限学习机每层的节点数确定样本的编码长度;然后将训练样本输入ELM,计算输出。极限学习机输出向量的均方误差的倒数作为样本的得分函数,用来评价该样本的优劣。通过不断进行趋同和异化操作,最终得到最优个体。算法流程图见图3,其具体步骤如下:

Step1建立ELM预测模型,确定极限学习机的节点数。
Step2随机生成初始群体,每个样本的编码长度为n×l+l,其中n为极限学习机输入层节点数,l为隐含层节点数,编码范围为[1,1]。根据每个样本的输出结果,计算得分并排序,得分最高的前h个样本构成hs个优胜样本和ht个临时样本,h=hs+ht。

Step4对子群体执行趋同操作至其成熟,每个子群体中得分最高的样本即为该子群体的最优样本,将其记录在局部公告板上,并将其得分作为该子群体的得分。
Step5等所有子群体完成趋同操作后,对所有子群体实行异化操作,排名靠前的子群体成为新的优胜子群体,将其记录在全局公告板上,并在环境中产生新的临时子群体。
Step6判断是否达到要求,若满足终止条件,则优化完成,当前的最优样本即为极限学习机的最优初始权值和阈值;否则,返回Step3进行下一次的迭代。
程可以帮助学生将静态的图解转变为动态的过程,理解起来更加顺畅,列表比较则是进一步将转录和翻译这两个概念具体化和清晰化。
Step7将搜索到的最优样本作为ELM的网络参数,训练得到MEC-ELM预测模型,并对其进行测试。
2 基于MEC-BP神经网络梁桥线形预测模型
2.1 工程实例概况
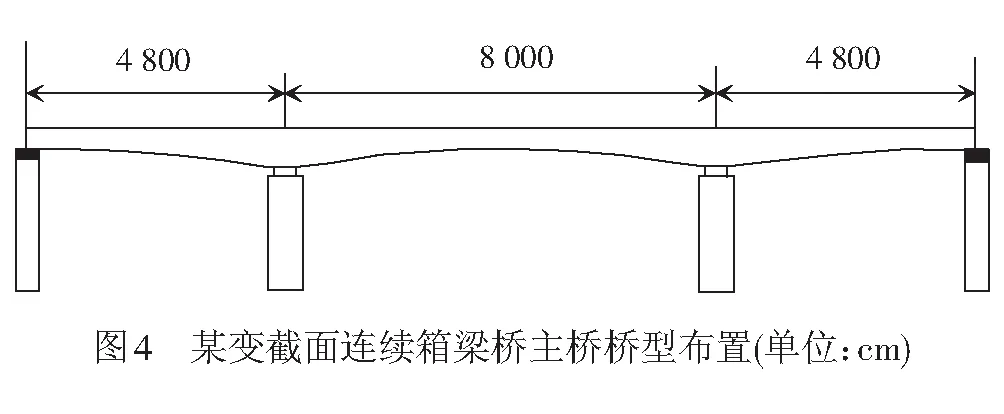
以南昌某省属重点工程中某变截面连续箱梁桥作为工程实例进行说明。该桥为单箱单室、变高度、变截面连续箱梁桥,全桥长度为176 m,其中两边跨长度为48 m,中垮长度为80 m。梁高由中支点(6 m)均匀变化至两端边跨直线段(3 m)和全桥跨中段(3 m),变化曲线采用二次抛物线形式,见图4。
箱梁采用单箱-单室-直腹板形式,见图5。其中,顶板厚40 cm,腹板厚由跨中的45 cm按折线变化至梁中支点根部的80 cm,底板厚由跨中的45 cm按圆曲线变化至梁中支点根部的85 cm;全联共设5道横隔板,分别位于端支点、中支点与中跨跨中。

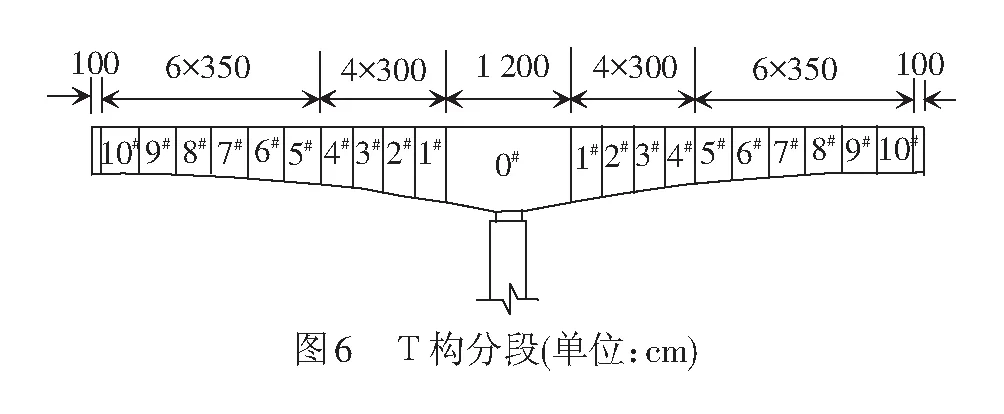
悬臂浇筑T构的节段划分见图6。全桥0号块节段长12 m,边、中跨合拢段长2.0 m,边跨现浇段长7.0 m,其余节段长(4×3.0+6×3.5) m。悬臂浇筑完成后的施工顺序为:(1)边跨直线段满布支架施工;(2)两边跨合龙,解除相应主墩的临时固结;(3)全桥(中跨)最终合龙;(4)二期恒载施工。
本例所选定的单箱单室、变高度、变截面连续箱梁桥由于上跨既有高速公路,故采用挂篮悬臂现浇法对其上部结构进行分段对称、独立施工,此类工法对施工质量有很高的控制要求,因此对大桥进行施工阶段的监测和控制极其必要。
2.2 输入、输出参数的确定
本文以T构悬臂长度、混凝土弹性模量等6个已施工桥段参数作为ELM的输入向量,以立模标高作为极限学习机的输出向量,各变量见表1。

表1 输入输出参数表
根据预测模型的输入和输出参数,本文采用输入层节点数n=6,输出层节点数m=1,隐含层节点数取l=2m+1=13个的极限学习机结构。
2.3 数据预处理
测量数据中含有的部分奇异样本,因这类样本的实测数据有较大的偶然误差,奇异样本通常具有突跳性、不合理的特性。奇异样本的存在,易使神经网络出现过学习现象,即过于注重奇异样本,而使正常样本的映射性态恶化。因此,本文去除了样本中的奇异数据,并用相应的线性插值数据代替。按照连续函数表示定理,归一化处理后输入变量x′可表示为[11]
( 6 )
式中:a、b为归一化系数;xmax、xmin分别为输入向量x中元素的最大值和最小值。
本文所使用的Sigmoid激励函数,其值域为(0,1),因此ELM的目标输出Δw也需要进行相应的归一化操作。由Sigmoid函数特性可知,当自变量接近0和1附近时,该函数的变化率逐渐减小,此时神经网络的收敛速度最慢,为保证神经网络的学习速度,处理后的目标输出在(0.05,0.95)为宜。因此,对样本目标输出的最大值Δwmax和最小值Δwmin进行相应线性调整,然后根据式( 6 )进行处理。以左幅8#-9#和9#-10#梁端张拉后截面各点标高偏差为例,选取a=0.118,b=0.69。归一化后的样本数据见表2。

表2 归一化的样本数据[21]
2.4 ELM输入层权、阈值优化
本实验中已施工梁段为8#、9#梁段,待施工梁段为9#、10#梁段。先用8#-9#梁段截面各点的标高偏差数据作为ELM的输入,对应的立模标高作为目标输出,训练ELM预测模型。在训练极限学习机时,按照1.3节的步骤,利用思维进化算法优化极限学习机的输入层权值和阈值。为了比较MEC算法和遗传算法,用相同的初始种群分别测试MEC和遗传算法的搜索性能,搜索结果见图7。MEC算法在第3次迭代时搜索到全局最优个体,适应度为99.68%,而遗传算法经过多次波动后,搜索到的最优个体,适应度为99.58%。搜索结果表明,与遗传算法相比,思维进化算法优化效率高,稳定性强,可以有效避免局部最优,优化性能更强。

2.5 ELM预测实验
将MEC优化的权值输入ELM,使用8#-9#梁段参数训练ELM,得到ELM输出层参数的最小二乘解,从而得到基于MEC优化的ELM预测模型。利用所得的优化ELM模型分别对8#-9#和9#-10#梁段截面点进行训练样本和测试样本的预测实验,其结果见表3。

表3 训练样本和测试样本预测结果
从表3中可以看出,经过思维进化算法和遗传算法优化后的极限学习机,对于训练样本都有良好的预测精度,最大误差不超过0.7 cm,但GA-ELM的平均训练误差为0.46 cm,而MEC-ELM的平均训练误差只有0.2 cm,其预测精度明显高于经遗传算法优化后的极限学习机。此外,针对测试样本,经过MEC算法优化的ELM仍有很高的预测精度,平均测试误差为0.002 cm,而经GA优化的ELM则表现出较差的预测精度,最低误差为0.7 cm,泛化能力弱。
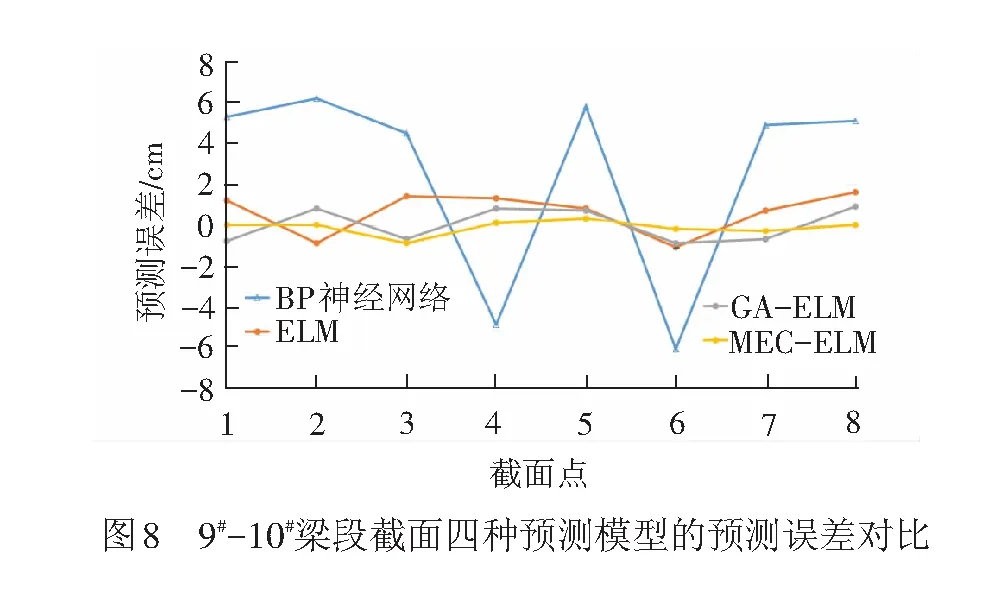
图8给出了BP神经网络、极限学习机、GA-ELM和MEC-ELM四种不同预测模型对9#-10#梁段截面各点的预测误差曲线,从图中可以看出,ELM较之BP神经网络表现出更加优越的预测性能,但标准ELM和GA-ELM仍然存在泛化能力弱,对测试样本预测精度低的不足,而本文提出的基于MEC-ELM算法则表现出更加优秀的泛化能力,适用于预测待施工梁段的线形参数,其工程意义更强。
3 结束语
本文结合实际工程,以南昌某连续梁桥的施工控制为例,应用思维进化优化的极限学习机模型预测大跨预应力混凝土连续梁桥施工过程中的线形偏差,提供了一种全新的大跨径桥梁的施工线形控制技术。本文首先选取了影响桥梁施工线形的若干参数,并针对奇异样本做相应归一化处理,然后选用8#、9#梁段作为已施工梁段,将该梁段各截面参数作为ELM的训练样本;接着,本文采用思维进化算法优化ELM的输入层权值和阈值,并用训练样本训练优化后的ELM,得到基于MEC-ELM的预测模型;最后将该预测模型用于待施工梁段,即9#、10#梁段的线形预测。预测结果表明,本文提出的大跨径桥梁的施工线形预测模型具有较高的预测精度和泛化能力,对待施工梁段的预测精度高,证明了该方法能够对连续梁桥的施工过程进行有效地预测控制,并且表现出方法简单,易于实现,预测效率高等特点。
猜你喜欢
振动与冲击(2022年15期)2022-08-16
文萃报·周五版(2021年30期)2021-09-05
铁道建筑技术(2021年3期)2021-07-21
西部交通科技(2021年9期)2021-01-11
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
铁道建筑技术(2020年11期)2020-05-22
中外公路(2019年6期)2019-06-09
中外公路(2019年4期)2019-04-16
北京航空航天大学学报(2017年6期)2017-11-23
海军航空大学学报(2015年1期)2015-11-11
